基于交通状况及行驶速度的高速公路换道时间研究
2020-05-19符锌砂胡嘉诚何石坚
符锌砂,胡嘉诚,何石坚
(华南理工大学 土木与交通学院,广东 广州 510640)
0 引言
换道行为是高速公路上常见的驾驶行为,通过变换车道可以满足驾驶员超车、驶出高速或者提高驾驶舒适度等需求,但是不良的换道行为也是诱发交通安全事故的原因之一[1]。据统计,2015年我国因变道操作不当等不良行为导致的交通事故占事故总数的4.9%[2]。而且近年来,自动驾驶技术不断发展,为了保障未来可能出现自动驾驶车辆与常规驾驶车辆并存的“混合交通”状态下的交通安全,换道行为参数的精准标定是重要基础工作之一[3-4]。因此,深入研究自然驾驶中的换道行为特征,对提高交通运输的安全水平有着重要意义。
驾驶员执行换道行为所需的时间(即换道时间)是描述换道行为特征的常用指标,常用于指导道路设计[5]、智能交通[6]、交通流模型构建[7-8]等研究。在目前的研究中,国内外学者从人、车、路的角度探讨了不同因素对换道时间的影响。在驾驶员的角度上,Hetrick[9]等收集不同年龄段驾驶员的换道数据,统计分析表明年轻驾驶员换道过程更快,换道时间更短。Lee[10]等通过实车驾驶分析得出女性驾驶员的换道时间比男性驾驶员要长。而从车辆的角度,Toledo[11]等则通过高空摄像头俯拍收集不同车型的换道数据,数据表明大型车比小型车的换道时间要短。Winsum[12]等则从道路的角度阐明不同车道宽度对换道时间没有显著影响。
从上述研究现状可以分析得出,尽管目前研究已从不同的角度探讨了各因素对换道时间的影响,但仍有两个影响换道时间的重要因素很少被考虑:(1)车辆换道时周边影响区域内的交通状况;(2)车辆换道起始时刻的行驶速度。目前城市道路领域的相关研究[13-14]指出,这两个因素对换道时间有着重要影响,但高速公路与城市道路的交通特性并不相同,高速公路领域中交通状况和行驶速度对车辆换道时间的影响还有待研究。
得益于计算机视觉技术的发展,利用车载视频进行高精度的换道行为识别[15-16]成为了可能。本研究选择了多条运营高速公路进行实车试验,记录驾驶员换道时周边的交通流密度,并通过OBD辅助驾驶装置获取车辆换道起始时的行驶速度,同时,采用计算机视觉技术识别车辆换道行为,获取换道时间参数。通过对不同交通状况和行驶速度下的车辆换道数据进行统计分析,研究交通状况和行驶速度对换道时间的综合影响。
1 数据采集及参数获取
1.1 实车驾驶数据采集
本研究中车辆换道时间数据均通过实车试验收集。试验路段为广东省的4条双向四车道的高速公路,分别是京港澳高速公路粤境韶关至广州段(广韶高速)、广昆高速公路粤境马安至河口段(广云高速)、二广高速公路怀集至三水段(广贺高速)、二广高速公路连州至怀集段(二广高速),设计速度均为100 km/h。通过社会招聘以及科研合作单位的人员配合,最终确定了6名驾驶人参与了本次试验。所有司机均持有有效的中华人民共和国机动车驾驶C1执照,并具有正常的视力。驾驶人年龄范围为22~45岁,性别均为男性。每名驾驶人的高速公路累计行驶里程超过3 000 km,驾龄为3~20 a不等。所有驾驶人均不熟悉试验路段的路况。
试验车辆前挡风玻璃正中央上方和车辆尾部中央安装行车记录仪,完整记录实车试验全过程,以此获取车辆换道行为和交通状况信息。车内装有OBD辅助驾驶装置,用于记录驾驶员试验全程的行驶速度。
驾驶员在试验前并未被告知试验目的,以确保驾驶员处于自然驾驶状态。每天进行两个批次的试验,试验时段分别为上午7:00—11:00和下午13:00—17:00,共进行24人次试验。试验时,每位驾驶员均按照自身的驾驶习惯完成各试验路段的驾驶。记录人员负责记录数据,并告知驾驶员试验路段起终点,不得有与驾驶员聊天等干扰驾驶员正常驾驶的行为。试验结束后,保存行车记录仪的视频,进行车辆换道行为的识别,判断换道时车辆所处影响区域内的交通状况,并读取车辆换道时的速度。
1.2 车辆换道时间提取
针对收集到的行车视频,本研究采用计算机视觉技术,识别道路两侧的车道边缘线,并计算图像中线与车道边缘线的横向距离差值Δd,生成每次试验的横向距离值变化图,以此进行车辆换道行为的识别。如图1所示,具体方法步骤如下:
(1)为了避免道路曲线段对Δd的扰动,仅对车辆正前方100像素点范围内的图像进行车辆边缘线的识别;
(2)对图像进行灰度转换为图1(a),采用canny算法进行边缘检测,然后运用霍夫变换技术对道路的车道边缘线进行识别,如图1(b)所示,并得到两侧车辆边缘线起终点在图像中的坐标,计算出两侧车辆边缘线中点的坐标;
(3)计算左侧车道边缘线和右侧车道边缘线中点与图像中线的Δd左和Δd右,如图1(c)所示;
(4)对每次试验的行车视频重复进行上述操作,记录视频各帧图片的Δd,最后形成横向距离差值变化图。
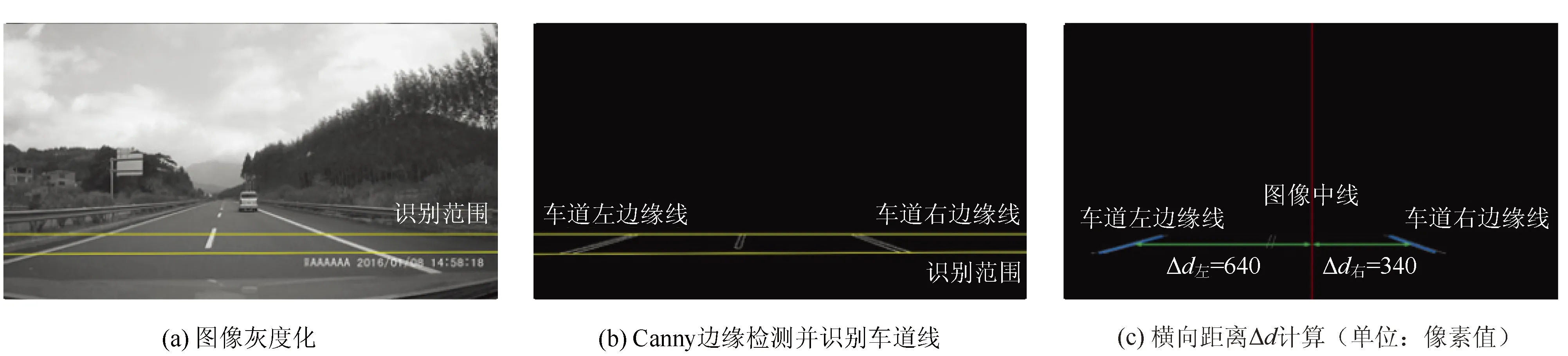
图1 车道线识别及距离计算Fig.1 Lane line recognition and distance calculation
为了从横向距离值变化图中识别车辆换道行为,车辆换道的关键时刻定义如下:以车辆往左变道为例,定义左侧横向距离Δd左不断减少(右侧横向距离Δd右不断增加)前的最后一个局部最大(最小)值为换道起始时刻;当Δd左和Δd右开始保持稳定时,则定义距离保持稳定前的最后一个局部最小(最大)值为换道终结时刻。换道起始时刻与换道终结时刻的差值即为车辆换道时间。如果根据Δd左和Δd右得出换道时间不一致,则取两者的均值。具体的换道横向距离变化图及关键时刻如图2所示。
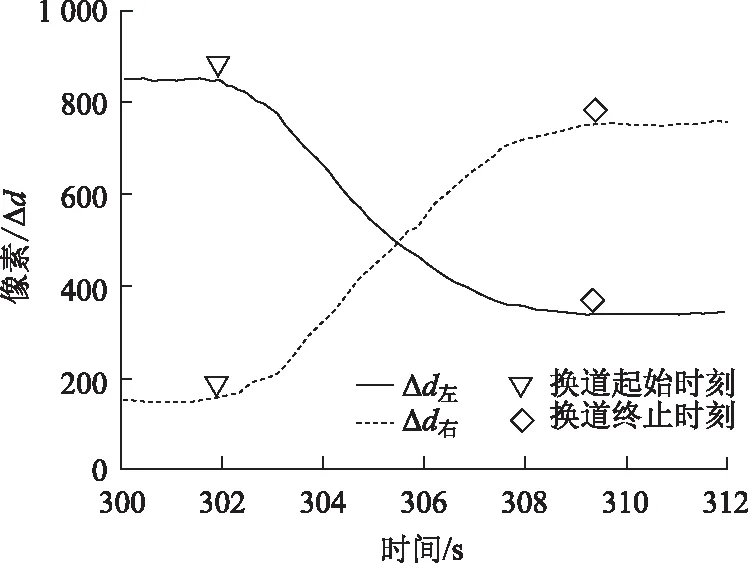
图2 换道横向距离变化及关键时刻Fig.2 Change of lateral distance of lane-changing and critical moment
在确定换道起始时刻后,将车载OBD辅助驾驶装置的试验全程速度数据与车载视频的时间轴进行对应,以确定每次换道起始时刻的车辆行驶速度。
1.3 实时交通状态划分
考虑到传统研究中对交通状况的划分大多较为宏观,难以反映换道车辆在换道时刻所处影响区域内的交通状况,因此,为了获取试验车辆换道时的实时交通状况,本研究采用了通过行车视频定义交通状况的方法。在每一次实车试验前均使用米尺标定试验车辆前方及后方100 m的位置,并在行车记录仪中对此位置进行记录。取试验车辆前、后方各100 m(共200 m)路段为换道影响区域,根据试验车辆前、后方行车记录仪视频,统计在换道起始时刻影响区域内的各车型车辆数。参考《公路工程技术标准》(JTG B01—2014)的车型折算系数,取小客车为1.0,中型车为1.5,大型车为2.5,汽车列车为4.0,计算换道影响区域内的标准车型交通量,以确定试验车辆在换道时的实时交通状况,具体如图3所示。为了与传统的交通流状态划分进行对应,对本试验定义的交通状况进行换算如下:取试验路段上各车辆的平均运行速度为设计速度100 km/h,而单位长度(200 m)在速度100 km/h下行驶时间为7.2 s(0.002 h),换算得到各交通状况对应的近似的单位小时交通量,并与文献[17]中所提出的交通流状态分类进行对比,确定车辆换道时所对应的交通状况。交通流状态与实时交通状况的对应及换算如表1所示。

表1 交通流状态与交通状况对应表Tab.1 Corresponding table of traffic flow status and traffic condition
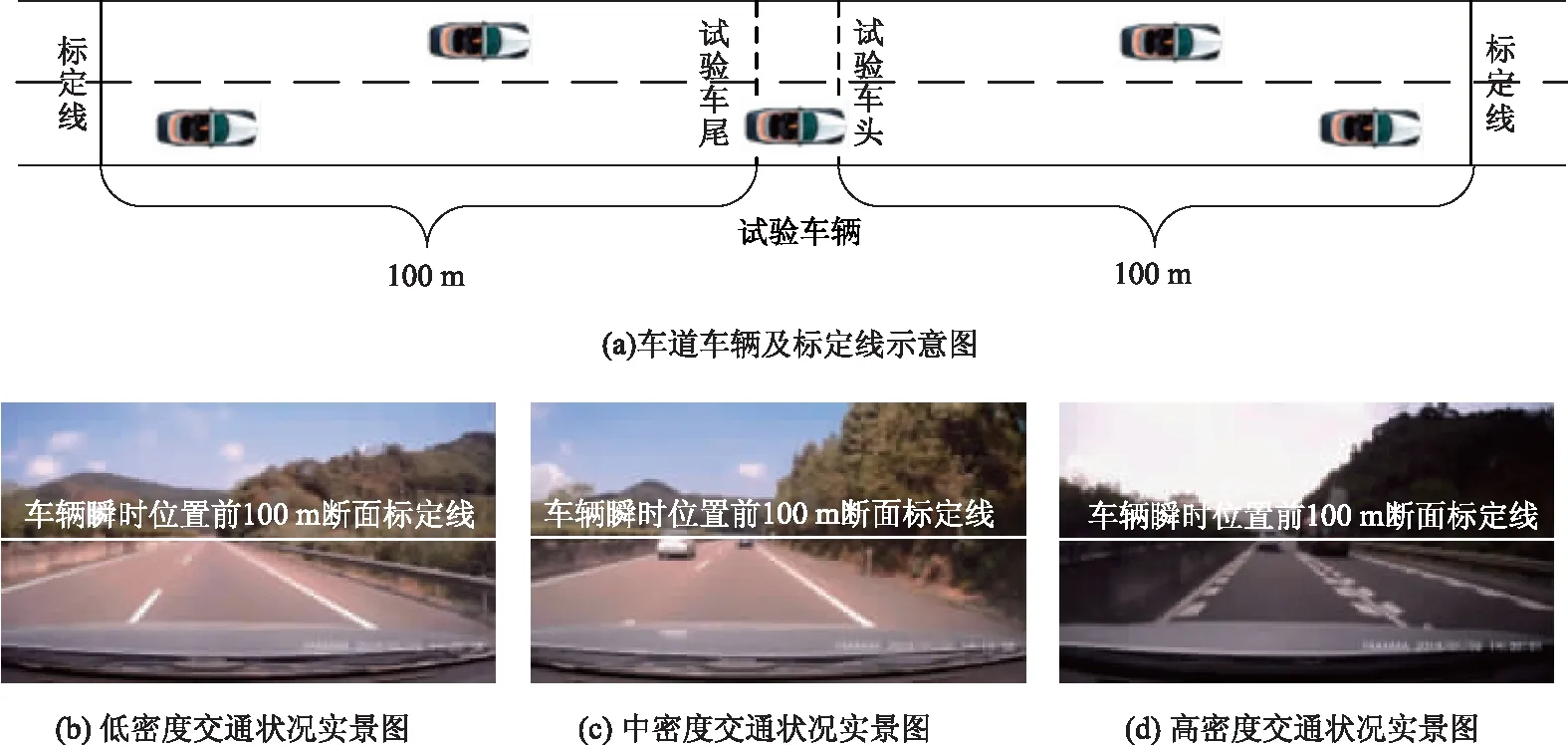
图3 换道影响区域示意图Fig.3 Schematic diagram of influence area of lane-changing
2 换道时间分析
对行车视频进行车辆换道行为识别后,共计得到625组不同交通状况和行驶速度条件下的换道时间数据。
2.1 交通状况对换道时间的影响
2.1.1 换道时间分布
换道时间的分布是微观交通仿真的重要输入参数。已有研究[10,18]认为,换道时间分布为对数正态分布。为检验本研究收集的换道时间是否符合对数正态分布,并验证本研究换道时间数据的可靠性,对不同交通状况下的换道时间采用K-S检验法(Kolmogorov-Smirnov test)进行检验。K-S检验法可以检验样本是否来自某一特定分布,将样本数据的累计频数分布与特定理论分布进行比较,若两者间的差距很小,渐近显著性大于0.05,则推论该样本取自该特定分布。K-S检验结果如表2所示。
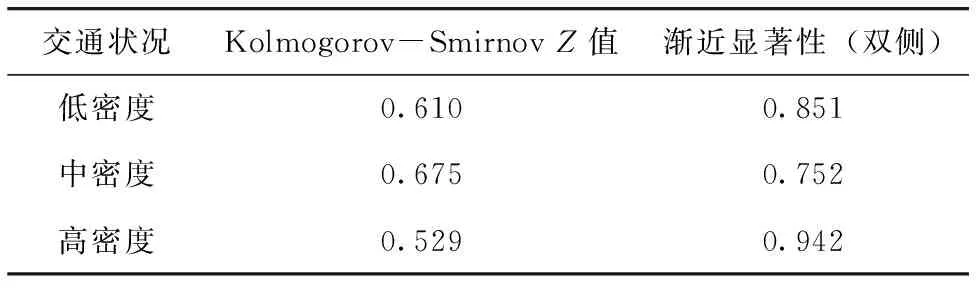
表2 K-S检验结果Tab.2 K-S test result
K-S检验结果表明,3组数据的渐近显著性值均大于显著水平0.05,故不同交通状况下的换道时间样本均服从对数正态分布,也验证了本研究数据的可靠性。
对数正态分布密度函数如下:
(1)
式中,μ为对数正态分布均值;σ为对数正态分布标准差,可由样本均值和样本方差求得,即:
(2)
(3)
计算得到μ低=1.794,σ低=0.187;μ中=1.706,σ中=0.181;μ高=1.718,σ高=0.185。根据μ和σ值计算各交通状况的换道时间分布曲线,得到各换道时间频率分布图如图4所示。
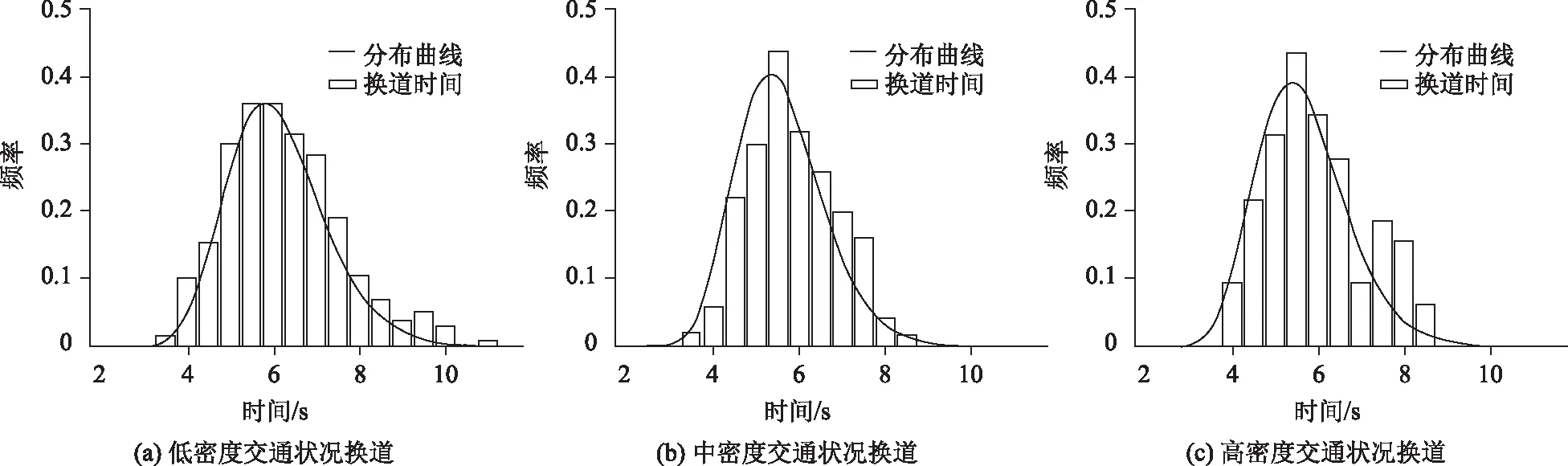
图4 换道时间分布Fig.4 Distribution of lane-changing time
2.1.2 差异性检验
不同交通状况下的换道时间数据分布如下:低密度交通状况下的换道时间数据321组,中密度交通状况184组,高密度交通状况120组。对收集到的换道时间数据进行分析,得到基本统计数据如表3所示。
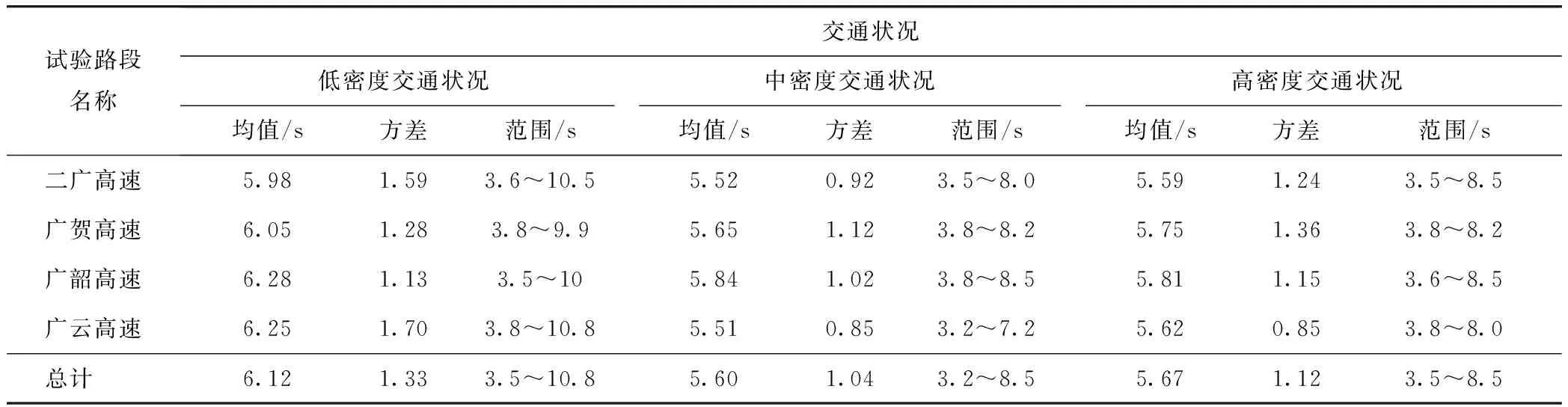
表3 换道时间基本统计数据Tab.3 Basic statistics of lane-changing time
由表3可以观察到,换道时间范围因交通状况不同而不同,低密度交通状况下驾驶员的换道时间为3 s至10 s不等,而中、高密度交通状况下则多集中于3 s到8 s。总体上,低密度交通状况下的换道时间均值比中、高密度交通状况的高,中密度交通状况与高密度交通状况的换道时间差距则较小。类似的,每个试验路段在不同交通状况下的换道时间规律均与总体规律一致。
为了检验不同交通流的均值是否在统计上存在显著性差异,本研究采用曼-惠特尼U检验进行假设检验。设定零假设为两组不同交通状况下的换道时间均值之间没有显著差异,在显著性水平α=0.05进行假设检验。曼-惠特尼U检验的结果如表4所示。
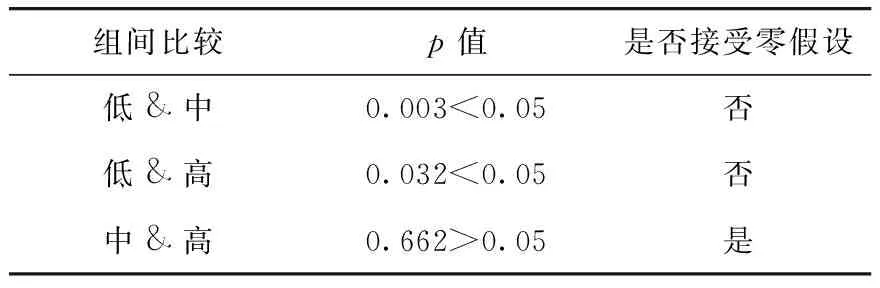
表4 曼-惠特尼U检验结果Tab.4 Result of Mann-Whitney U test
根据曼-惠特尼U检验结果可以发现,低密度交通状况下的换道时间均值与中、高交通流均有显著性差异,而中密度交通状况的换道时间均值则与高交通流没有显著性差异。检验结果表明,驾驶员执行换道时影响区域内的交通状况对换道时间存在显著影响,在低密度交通状况下,换道时间较长,而在中、高密度交通状况下,换道时间较短。
2.2 行驶速度对换道时间的影响
由2.1节可知,不同交通流密度状态下驾驶员的换道时间之间存在总体差异,因此需要对造成这种差异的根源进行进一步的探讨。鉴于行驶速度是常用于表征行车状态的综合指标,本研究以此为切入点,讨论行驶速度对换道时间产生的影响。
文献[14]提出城市道路中行驶速度在54~90 km/h时换道时间与行驶速度没有显著联系,考虑到高速公路行驶速度比城市道路的行驶速度要高,在把不同交通状况下的换道时间和行驶速度一一对应后,根据行驶速度的差异,将换道时间划分为低速组(行驶速度≤90 km/h)和高速组(行驶速度>90 km/h)两组。其中,低速组含有换道时间数据308组,高速组317组。为检验行驶速度对换道时间是否有显著性影响,采用方差分析(Analysis of Variance,ANOVA)对不同交通状况和行驶速度条件组合的换道时间进行分析,当P值小于0.05时,则认为具有显著性影响。具体分析结果如表5和表6所示。

表5 相同交通状况条件下不同速度数据分析表Tab.5 Data analysis table of different speeds under same traffic condition
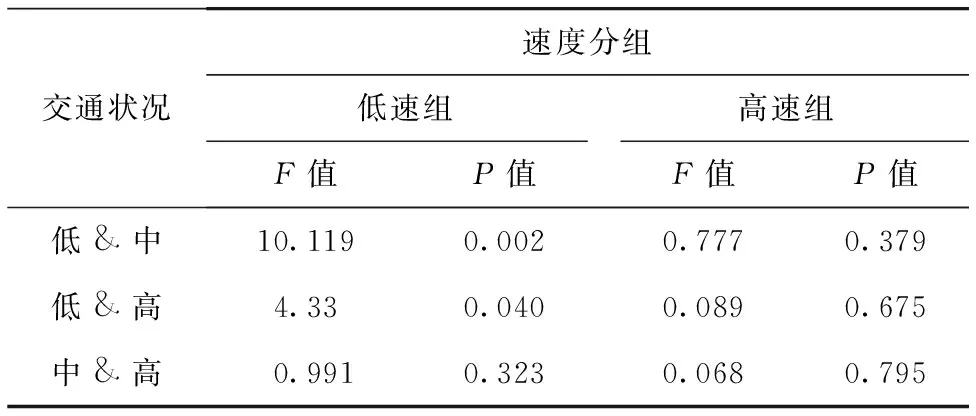
表6 相同速度条件下不同交通状况数据分析表Tab.6 Data analysis table of different traffic conditions at same speed
根据表5和表6分析得到:
(1)相同交通状况下不同速度组的换道时间比较结果显示:在低密度交通状况下,行驶速度对换道时间有显著影响,低速组的换道时间比高速组长0.5 s;而在中、高密度交通状况下,行驶速度对换道时间并没有显著影响;
(2)同一速度组下不同交通流的换道时间比较结果显示:当行驶速度高于90 km/h时,不同交通状况对换道时间没有显著影响;当行驶速度低于90 km/h时,低密度交通状况对换道时间有显著影响,车辆换道时间比其余各组数据长0.7 s左右,而中、高密度交通状况则对换道时间没有显著影响。
从上述分析得出,当车辆在低密度交通状况且行驶速度低于90 km/h换道时,换道时间会受到交通状况和行驶速度的双重影响,其时间均值较长,为6.3 s。而在其余各组条件组合中,换道时间均不受交通状况和行驶速度的影响,换道时间均值之间没有显著差异。
不仅如此,上述结论也能充分说明2.1节中得出的相关结论:驾驶员执行换道的持续时间与其所处的交通状况存在显著影响。不同交通状况下驾驶员换道时间存在显著差异的主要原因在于:低密度交通状况下,车辆在低速状态下换道时,换道时间较其余组合条件下的换道时间长0.6~0.7 s;中、高密度交通状况下车辆的换道时间并不受车辆行驶速度的影响。
3 结论
本研究在不同的高速公路进行实车试验,利用计算机视觉技术对行车视频进行车道线检测,并记录换道时的行驶速度,采集不同交通状况和行驶速度下的车辆换道行为数据,对换道时间的统计分析得到如下结论:
(1)不同交通状况下的换道时间均服从对数正态分布;
(2)通过假设检验分析可以发现,驾驶员执行换道的持续时间与其所处的交通状况存在显著联系。车辆在处于低密度交通状况下的换道时间比在中、高密度交通状况的长;
(3)低密度交通状况下,车辆在低行驶速度状态下换道时,换道时间比其他交通状况和行驶速度组合的长。
本研究成果可为自动驾驶、微观交通仿真等相关模型的变道行为参数标定提供参考,对改善高速公路交通运输的安全管理水平具有重要作用。
