大直径泥水平衡盾构气垫压力平衡控制系统
2020-05-19
(中铁工程装备集团有限公司,河南 郑州 450016)
盾构是隧道开挖的主要装备,根据地层及适应性不同,可分为很多种类。目前对于越江跨海或复杂地层的隧道,大多采用混合式泥水盾构。根据泥水平衡方式的差别,泥水平衡盾构可分为直排式泥水盾构和气垫式泥水盾构两种类型,即为我们常见两种直接型控制型和间接控制型泥水盾构[1]。其中直排式泥水盾构通过进排浆泵来实现泥水处理,通过调节进、排泥泵的流量来控制泥水舱的开挖面的支护压力。气垫式泥水盾构采用泥水仓和气仓舱形式,盾构气垫舱上部分充以压缩空气,在同一接触面上气液具有相同的压力,开挖面的支护压力可以通过调整气垫舱的压力来实现控制。由于直排式泥水盾构被控对象的非线性等特性,这种泥水平衡系统压力波动较大。气垫式泥水盾构在掘进过程中,及时补偿气垫舱中压缩空气的压力,就可以快速补偿开挖面支护压力的变化。一般情况下直接控制型要求支护压力变化控制在±10kPa 以内,而间接控制型要求支护压力变化控制在±5kPa 以内[2]。这也说明气垫式泥水平衡盾构在压力平衡系统中更具有优势。
大直径泥水平衡盾构不同于常规直径或者小直径盾构,开挖断面大、埋深深、支护压力高,施工距离长,因此开挖面的稳定性是至关重要的。宋蕴璞等在分析工作原理基础上,建立泥水平衡盾构开挖系统控制模型,系统仿真了各种影响开挖面压力平衡的影响因素,为泥水盾构施工提供了理论依据[3~6]。岳松林等针对超大直径越江隧道的泥水盾构开挖面失稳因素进行定量分析和三维数值模拟得出开挖面支护压力的稳定性对土体扰动影响最大[7~8]。
1 气垫压力平衡控制技术
气垫式泥水平衡盾构的气垫舱压力由一套完整全气动气体保压系统来控制。系统采用PID 闭环反馈控制方式。压力变送器测得气垫舱压力反馈给PI 控制盒,PI 控制盒通过积分和微分运算给调节阀输出阀门定位信号,阀门定位器给出阀门调节流量信号,从而控制通过阀门的空气流量来达到气垫舱压力的稳定。控制系统简图如图1。
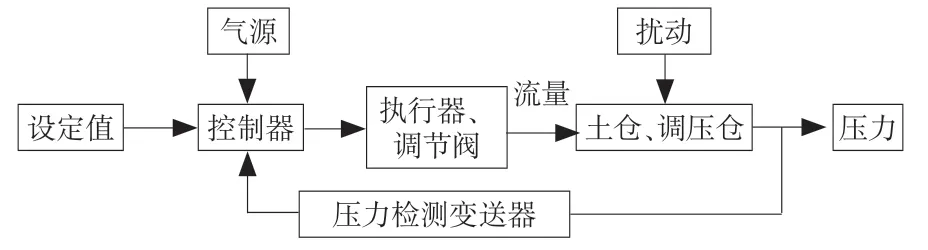
图1 控制系统方框原理图
系统特点:配置的阀门都是气动元件,在断电情况下仍可以继续工作。系统一般采用一用一备设计方案,只要有气源不断供给系统,在断电情况下就能正常工作。因此为了满足隧道施工,设备上通常会配置应急发电机或内燃空压机。在国外严格施工时,通常采用洞外输送压缩空气方案。气体压力平衡控制系统主要由气垫舱、后隔板区域的一进一排的气力调节系统以及后配套区域的气源组成。系统不仅要满足正常掘进气液两相压力平衡控制需要,而且还配备了压缩空气滤清功能,满足带压进仓人员作业时正常呼吸[9~10]。因此在泥水平衡盾构施工中应用工况复杂,其精度和响应时间将影响支护压力稳定、人员施工安全,地表沉降控制要求。
2 气垫压力平衡控制理论研究及分析
气垫压力平衡系统的控制变量是气垫舱的压力,操作变量是进入气垫舱的空气流量。系统在控制器不变情况下,系统响应速度主要影响因素有调节阀流量特性、调节阀的驱动器。首先需要建立进排气流量与气垫舱压力变化的关系,由于在压力平衡过程中时间短,仓内的温度变化小,所以可将该过程视为恒温绝热过程,该状态满足理想气体状态方程
式中P——理想气体的绝对压强;
V——理想气体的体积;
n——理想气体物质的量;
T——理想气体的热力学温度;
R——理想气体常数。
短时间内在气垫舱内的压缩空气体积不变,压力变化时仓内空气摩尔量发生变化,单位时间内的变化满足下列关系
式中V0——气垫舱内初始压缩空气体积。
可以得出
在此将n的气体参数基于标准气压修正,进行简化关系为
式中(t)——单位时间内压力变化;
Q—气体流量。
调节阀向气垫舱内流动压缩空气本身就是一个动态过程且阀门本身也具有一定的动态特性,短时间内符合气体阀门Kv流量特性。调节阀的进口压力P1由空气系统保证可作为恒压处理,调节阀出口压力(气垫舱内)P2短时间变化量小也可做恒压处理,一般情况下维持P2>P1/2且(P1>P2)<P1/2,则根据空气动力学可知

式中Kv(t)——某一时间时阀门流量特性参数;
P1——调节阀进口压力;
P2——调节阀出口压力;
T1——气体的热力学温度;
——气体密度。
调节阀动态特性流量参数由控制器给阀门定位器信号后,驱动执行器控制阀门行程从而控制流经控制阀的流量。该调节阀特性在额定行程0~100 百分比范围内能够与流量特性保持等比线性关系,短时间内阀门两端进出口压力视为恒压处理,则阀门流量特性参数与驱动执行器的行程保持等比线性关系

式中K线性——阀门流量线性特征常数;
X——调节阀驱动执行器阀杆位移行程。
调节阀初始不动,执行器的弹簧推力平衡了阀杆密封处摩擦力、阀芯自身重力、关断时流体压力以及阀座压紧力的总和。由阀门定位器给出的信号压力只用于阀杆动作使弹簧产生位移的弹簧力。

式中k弹簧——驱动执行器内弹簧弹性系数;
A膜片——驱动器执行器膜片的面积;
Pst——达到平衡时信号压力。
此时定位器的进口压力P3由空气系统保证可作为恒压处理,定位器出口压力Pst初始状态为0,一般情况下维持P2<P1/2且(P3-Pst)>P1/2,则根据空气动力学可知
式中Q定——阀门定位器瞬时流量;
Kv定——阀门定位器流量特性参数;
P3——阀门定位器进口压力;
T1——气体的热力学温度;
——气体密度。
由上述可知驱动器内的压力变化也满足理想气体状态方程,根据位移产生体积的变化以及气态转换可得到
综上可得出最终结果

由上述结果可知影响系统的因素有:阀门流量线性特征常数K线性、阀门定位器流量特性参数Kv定和阀门定位器进口压力P3。降低K线性值线性刚度以适应不同工况下的压力波动需求,提高系统控制精度可减少系统震动次数。增大P3和Kv定可以有效提高系统响应时间。
3 高精度快响应气垫压力平衡控制特点
高精度快响应气垫压力平衡与保持控制技术采用的控制原理仍然是负反馈闭环控制方式。主要通过以下几种方式提高系统的精度和响应时间。
1)采用四回路并联控制方式,将气体保压系统的进气回路分别由一大一小进气调节阀且并联进气,将排气阀门分为一大一小排气阀门且并排排气。大小阀门通过流量设计分配减少K 线性值线性刚度值,从而减少系统判断时间加快阀门运行速度,提高系统控制精度。系统原理简图如图2所示。
2)控制器进行分段控制以适应不同工况条件要求,达到精准调节。对于大直径设备上,为了能够使气垫舱控制精度更高,保证泥水仓支撑压力的稳定性,气体保压系统通过PI 控制器分段控制大小阀门开度,来精确调整流量以保证掌子面支撑压力的稳定性,避免造成支撑压力波动过大。

图2 四回路并联控制方式简图
上述系统通过小阀门小流量进排气模式控制来满足以下工况:①正常掘进液位较平稳工作模式;②人员带压进仓维修保养。
上述系统通过大阀门大流量进排气模式控制来满足以下工况:①进浆瞬时停止排浆正常时进气模式维持支撑压力稳定;②排浆瞬时停止进浆正常时排气模式维持支撑压力稳定。
3)增加速度放大器,增大P3和Kv定值从而加快阀门的动作速度从而提高系统响应速度。系统将阀门定位器上的控制信号引入到速度放大器上,从而控制速度放大器开关来控制调节阀驱动器的动作。控制系统简图如图3 所示。
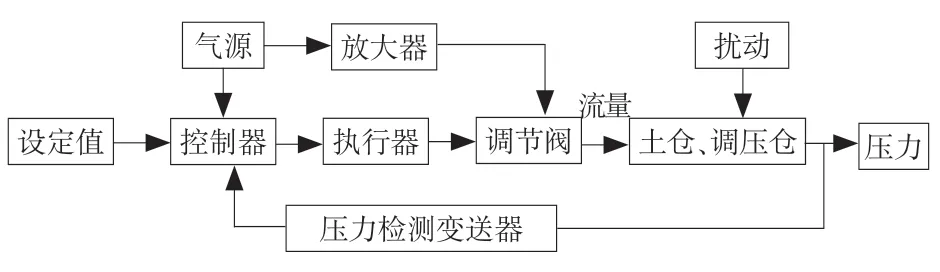
图3 控制系统方框原理图
4 结语
1)高精度快响应气垫压力平衡系统通过采用四回路阀门并联来分段控制进排气流量以及速度放大器,使从整套气垫压力平衡系统性能显著提高,可更灵敏快速补偿开挖面支护压力的变化,达到支护压力稳定。
2)超大直径超高水压超长距离盾构施工未来需求量将增多,该高精度快响应气垫压力平衡系统能够顺利保证开挖面支护压力的稳定性,解决隧道施工困难,提高隧道施工安全。