基于图像序列的被动测距*
2020-05-18李玉钊张英杰张伟刘岩陈曦
李玉钊,张英杰,张伟,刘岩,陈曦
(北京遥感设备研究所,北京 100854)
0 引言
红外成像制导技术越来越多的应用到防空导弹,但红外被动制导系统无法直接测量目标的相对距离[1],而对于红外末制导体制防控反导拦截武器,不仅制导规律依赖于弹目相对距离,制导引信一体化也需要弹目相对距离信息,有时还利用弹目相对距离信息实现引信的解锁功能[2-3]。
采用多站交叉定位的被动测距方法,不适用于弹载平台[4]。传统的单站被动测距,主要有波前正交编码测距法[5],基于角度测量的测距法[6],基于目标体辐射特性的测距法[7-8],基于计算机视觉的测距法[9],均不适合防空反导的弹载应用。西安电子科技大学[10]提出一种基于图像长度和面积的红外被动单站定位算法,但需要提前预知初始速度和初始距离;洛阳光电技术发展中心[11]和中科院半导体所[12]提出基于红外图像的被动测距方法,但需要预知目标的几何参数;华中科技大学[13]利用红外目标像的光流进行测距,但计算目标像的光流过程较为复杂;空军工程大学[14]利用单站双波段红外系统,根据双色的大气传输特性差进行目标距离估算。
上述被动测距方法,都没有分析弹载应用的探测时长限制,以及交会段高转角速率的特性,不适宜直接在反导武器的动态飞行成像系统上应用。
本文在单站单色红外成像导引的前提下,分析了反导系统中用于测距的有效图像数据区间,提出分别基于面积梯度和基于灰度梯度的被动测据算法。算法不需要提前预置目标的具体结构尺寸或辐射特性,而只用目标像素点个数或灰度和,进行简单运算得到弹目距离的估计。
1 基于图像梯度的被动测距原理
在红外被动成像探测中,目标图像几何特征的变化反映了弹目空间位置的变化。
在目标充满红外视场前的t时刻,目标的视在面积为Stg(t),弹目距离为r(t),则目标在探测器上的成像面积simg(t)与弹目距离r(t)为
(1)
式中:f为成像系统的焦距。
可见,由于Stg(t)和r(t)均为未知量,设交会前的时间区域内任意2个时刻ti,ti+j的成像面积分别为simg(ti),simg(ti+j)。
设交会段的相对速度大小vr不变,并可由制导系统提供,当r(ti)>r(ti+j)≥ρ(ρ为脱靶量)时,由距离关于时间的函数为递减的性质可得
r(ti+j)≈r(ti)-vr(ti+j-ti).
(2)
联解2个距离值对应的式(1)得到参量r(ti)的唯一解
(3)
此外,探测器接收到的目标辐射能量C为各面元ds能量的叠加
(4)
式中:E为和导引头有关的常数;I(s)为面元ds的辐射照度;r(s)为面元ds距导引头的距离,在远场时可认为各面元的距离近似相等。
在弹目遭遇的过程中,一般认为同一视角下的I(s)不再发生变化,因此有
(5)
可见,与探测器成像面积simg(t)类似,探测器收到的辐射能量C(t),也是与r-2(t)呈正比。同样,也可利用总灰度值的变化进行距离参量r(ti)的估计。
2 基于图像梯度的被动测距算法
以上分析了参数解的唯一性条件,但是利用2个测量值求解得到的炸点可能存在较大偏差,应该利用交会过程的系列测量数据,以减小估计的偏差。
2.1 基于面积梯度的算法设计
定义t0是距离探测的初始时刻,其对应的弹目距离为r0。
定义归一化面积梯度为
(6)
由于实际上的红外成像是离散的,归一化面积梯度为
(7)
式中:k=0,1,…,K-1。
记yk=[simg(k+1)-simg(k)]/[Tsimg(k)],可得关测方程
(8)
可利用式(9)得到初始距离估计
(9)
2.2 基于灰度梯度的算法设计
导引头测量的图像灰度和为C(t),与2.1节类似,记归一化灰度梯度为zk=[C(k+1)-C(k)]/[TC(k)],并进行式(10)的初始距离估算
(10)
3 成像系统测距的相关参数确定
设反导系统所对付的目标是小型高速弹头,需要针对弹头的特点进行系统参数设计。
设红外导引头的成像视场角度为θ(rad),红外探测器阵元数为N×N。记目标垂距离维的最小投影的长一维尺寸为lmin,垂距离维的最大投影的长一维尺寸为lmax。
设目标长轴充满视场时的距离为导引头的探测盲区rmin,即弹目距离小于rmin就可能无法实现对目标的全部成像,可得
(11)
(1) 视线转角约束
假设导引头从r0远处持续跟踪目标至r1,在r0远处所成的目标长轴像素数N0,r1远处所成的目标长轴像素最小为N1=Nlmin/lmax,则目标像的长一维像素从N0→N1的变化过程,对于导引头观测视线而言,由相对位置变化而产生的目标绕质心最大转角Ω为
(12)
式中:ρmax为反导系统可能的最大脱靶量。
为了防止在观测过程中出现较大视线转角,从而导致目标成像特点发生较大变化,可以设置一个转角门限Ωt,使得Ω≤Ωt,且一般情况下满足ρmax·θ≥lmaxΩt,则要保证不同交会状态下的目标视线转角都在门限Ωt之内,需要满足
(13)
(2) 观测时间约束
目标像的长一维像素从N0→Nmax的变化过程,要求时间不可太长,以免偏离匀速直线运动的假设太大,需要控制在Δt以内,需要满足
(14)
联合式(13)和式(14)可得
(15)
例如,当lmax=3,lmin=0.7,ρmax=8,θ=0.1 rad,N=512,Ωt=0.1 rad,vr=3 000,Δt=0.1时,按式(15)可得N1=119.5,N0≥23.9。
4 算法仿真和对比
进行弹目交会仿真,仿真中导引头和交会参数如表1所示。

表1 测距仿真参数Table 1 Simulation parameters of ranging
仿真用的目标辐射模型如图1所示,分割为各辐射面元1 cm2,探测器噪声服从正态分布,目标像和噪声的对比度为60,忽略探测阵元间隙。图像检测采用有序统计量恒虚警检测算法[15]。

图1 目标红外辐射模型Fig.1 Infrared radiation model of target in simulation
进行256次仿真,其距离估计结果如图2所示。并统计256次仿真的目标距离估计值的均方根和均值。

图2 面积梯度和灰度梯度随距离的变化Fig.2 Square gradient and gray-scale gradient under ranges
第8次仿真的梯度随距离的变化如图3。
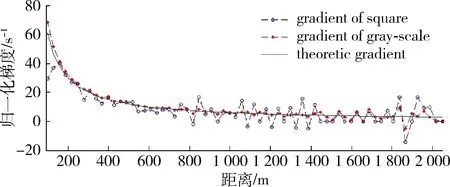
图3 面积梯度和灰度梯度随距离的变化(第8次仿真)Fig.3 Square gradient and gray-scale gradient under ranges(8th simulation)
可见,2种距离估计结果相对距离真值(2 048 m)都是有偏的,这是因为噪声“淹没”了部分目标像。基于灰度的距离估计精度优于基于图像面积的距离估计,是因为后者在计算面积的时候进行了二值处理,丢失了目标辐射强度的细节。
5 结论
本文分析了利用图像面积或灰度的梯度进行距离估计的全局可观性,得出距离接近时区间内无误差的任意2个不同时刻图像值与距离的唯一对应关系。分析了针对弹头目标时的成像导引头系统的测距相关参数。利用数值仿真方法进行了弹目交会模拟,结果表明:①利用图像面积或灰度的梯度可以实现目标距离的估计;②在所设定的仿真条件下,利用灰度梯度的距离估计精度优于利用面积梯度的距离估计;③利用图像面积或灰度的梯度进行距离估计精度是有偏估计,不一定可以直接用于破片式战斗部的炸点控制,但可用于制导控制、引信解锁,以及杀伤增强装置的引爆[16]。本文的结果可为用被动红外成像进行距离估计提供参考。