海域环境舰船应对异构无人集群防御构想*
2020-05-18张耀华袁俊杨小艳宋申民
张耀华,袁俊,杨小艳,宋申民
(哈尔滨工业大学 控制理论与制导技术研究中心,黑龙江 哈尔滨 150001)
0 引言
近年来,针对无人机(unmanned aerial vehicle,UAV)集群技术的研究尤为引人注目。为遏制中、俄等国日益崛起的军事力量,美国于2014年推出以“创新驱动”为核心的第三次“抵消战略”,基于国防预算倍受限制的现状,美军在作战概念方面进行创新,力求获取强军事对抗环境下的非对称优势,在这一背景下,诞生了集群式无人机作战概念[1]。无人机集群作战概念可以追溯到人类对仿生学的研究,蚁群、蜂群、鸟群、鱼群等群体在运动过程中能够实现避撞,进行信息交流,协同完成任务。随着科技的进步,无人机集群融合人工智能、大数据等技术手段,形成“群体智能”(swarm intelligence,SI)技术。无人机集群作战,不仅可以在空中进行,还可以在水下开展。水下无人潜航器(unmanned underwater vehicle,UUV)的应用还未同空中无人机一样为人所熟知,但在军事领域,针对UUV的研究一直未曾止步。UUV集群作战或集群探测、协同作战的研究[2-3]正逐步由理论向实践迈步,未来研究空间巨大。在未来战争中,无人系统集群技术可能引发战争技术的革命,是具有改变战争形态能力的颠覆性技术。正因如此,应引起足够重视,并开展对反无人系统集群作战的研究,探究应对具有智能行为的无人系统集群威胁的策略。
随着海洋开发的深入发展,世界各国对海域领土的争端时有发生。面对新型无人系统集群威胁,有必要展开海域舰船防御体系的研究。海域环境作战情况复杂多变,具有覆盖范围广、涉及领域宽、时空变化大等特点[4]。除了传统的地理、水文、气象等条件对舰船作战较大影响外,海域舰船面临的复杂水声环境和电磁环境对探测预警系统带来了极大挑战。着手建立海域舰船应对UAV群与UUV群防御体系,对于未来的海军防御体系建设具有重要意义。
1 无人系统集群研究现状及军事需求
1.1 无人系统集群研究现状
目前世界上研究无人系统集群技术成熟度高的国家是美国,可预见美军未来会将无人系统集群技术用于实战当中。此外,中国对无人系统集群技术的研究在飞速发展当中,也处于世界前列,下文重点对美国和中国无人系统集群研究现状展开探讨[5-6]。
美国国防部高级研究计划局(defense advanced research projects agency,DARPA)、海军研究局、众多实验室及高校等组织机构,对于UAV集群的概念验证进行了很多研究。美国曾于2001年发布《无人机系统路线图2005—2030》,将“全自主集群(人类对无人机的工作几乎不作指导,但仍然拥有最高权限)”定义为无人机自主控制的最高等级,预计2025年后无人机将具备全自主集群能力[7],图1为美国空军2030年集群作战概念图。

图1 美国空军2030年集群作战概念Fig.1 U.S.Air Force 2030 Cluster Operations Concept
美国近几年大力推进系列化集群项目发展,如“小精灵”(Gremlins)项目、“拒止环境中协同作战”(collaborative operations in denied environments,CODE)项目、“灰山鹑”(Perdix)项目、“进攻性蜂群使能战术”(offensive swarm-enabled tactics,OFFSET)项目、“低成本无人机集群技术”(low-cost UAV swarming technology,LOCUST)项目、“自主集群弹性战术网络”(elastic network of autonomous SWARMS)项目等。美国投入巨大人力、物力和财力发展UAV集群项目,开展多次集群飞行试验,验证了无人机在发射、回收、集群控制等方面的能力,达到世界领先水平。美国对UUV的研究也很重视,UUV在海洋测量、ISR(intelligence,surveillance,and reconnaissance)、反潜、防水雷对抗及攻击等方面具有可挖掘应用价值,多个UUV组成集群在母船附近海域探测可起到很好的辅助作用。未来UUV集群探测将会在敏感海域发挥巨大作用,尤其是和平时期进行情报侦测工作令人防不胜防,针对UUV集群的应对方式值得进行深入研究[8]。
中国对UAV集群技术的研究已取得一定成果。中国电子科技集团在2016年和2017年分别进行的67架、119架固定翼无人机集群飞行试验,前者进行了集群编队连续起飞、降落试验,后者进行了密集弹射起飞、自主编队、集群飞行的演示试验。未来中国对UAV集群技术的研究将致力于UAV群的实用化,并提升集群智能的水平[9]。中国对于UUV的研究一直都很重视,尤其是对海洋权益重视程度提升之后,相关研究的投入随之增加。可以预见的是,随着对UUV的研究与应用程度逐步加深,UUV群化研究会提上日程[10-11]。
1.2 军事需求
目前中国与周边国家发生潜在军事冲突的区域主要是海洋,因此海洋方向的安全问题将更受重视。随着世界科技的飞速发展,建立新型防御体系显得尤为重要。未来中国海军舰船将面对来自敌方空中与水下无人系统集群协同攻击,现有防御系统面对密集空中UAV集群与隐蔽UUV群协同攻击,很难全部消灭目标,可能会使部分敌方目标突防,威胁我方安全。面对新型威胁,中国为维护自己的边疆、海疆安全,很有必要展开应对空中与水下无人系统集群威胁的防御研究。
2 防御方案描述
2.1 问题剖析与现有防御手段
2.1.1 问题剖析与初步设想
本文设想将基于海基空天防御展开,并将近年来备受关注的UAV集群作为威胁对象,展开防御体系构想。此外,考虑所处防御区域为海洋环境,将UUV也考虑在内。以空中多个UAV和水下多个UUV构成异构无人集群系统,并以此作为防御对象展开研究。
现有防御体系难以对抗空中与水下无人系统集群。UAV集群作战通常具有机动、快速、密集等特点[5],对于防御一方而言,UAV群相对一般来袭目标(如飞机、导弹等)具有目标数量多、突防能力强等特点,往往需要花费更大代价才能拦截成功,效费比低,不符合经济效益需求。UUV具有良好的隐蔽性与对恶劣环境的适应性,未来一旦在大范围水域形成集群作战网络,在水下探测、协同攻击方面将对现有防御体系带来极大挑战。此外,未来随着水下平台与空中平台之间的实用通信技术的突破,以及人工智能技术的不断发展,军事强国针对无人系统集群展开的智能化研究可以赋予UAV与UUV智能协作能力,这无疑会进一步增大防御方的应对难度。
应对未来可能出现的异构无人系统集群威胁,可以按照探测、识别和拦截3个步骤去考虑,首先要检测到无人系统群;其次要对目标进行敌我识别,做出应对决策;最后,对敌方目标进行拦截打击。本文针对集群无人系统的探测预警与拦截问题展开防御方案设想,并对其中涉及的相关技术进行介绍。应对空中与水下无人系统集群初步设想如图2所示。

图2 舰船反无人系统集群初步设想图Fig.2 Illustration of ship againsting UAV and UUV swarms
2.1.2 现有防御手段
2.1.2.1 探测预警可选方式
与飞机、导弹等传统威胁类似,如何尽可能早地感知到UAV群的存在,是进行有效防御的前提。
对于UAV的探测,常规方法包括雷达探测、无线电探测和光电探测等[12]。UAV群往往需要在某个平台(如空中母机、水面舰船等)上发射,并且能够以较低飞行高度飞行,因而具备良好的隐蔽性,这会使探测变得困难。目前雷达探测技术相对成熟,故而选用雷达作为主要探测装置。未来UAV群可能实现低空或超低空飞行,加上个体体积小,UAV雷达散射截面很小,会增大雷达探测难度,现有的雷达探测装置很可能无法及时发现目标。所以除了以雷达作为主要探测装置,还应开发其他的辅助装置。现有的探测UAV方法除雷达外,还有借助声音、视觉、热量和无线电等进行探测的方式,这些可作为备选方案,如辅助以红外多光谱技术的图像目标检测,弥补单一雷达检测的不足。
对于UUV的探测,水下环境相比空中更为复杂,对于UUV的探测也很困难,目前声纳技术是最好的选择。声纳是各国海军进行水下监视使用的主要技术手段,用于对水下目标进行探测、分类、定位和跟踪,满足水下通信和导航等需求[13]。美国针对UUV的研究已开展多项计划,美国海军投放的UUV部分已装备探雷声呐,UUV编队也在建设当中。除此之外,以微波遥感、红外遥感、光学遥感等为代表的海洋遥感技术[14]可作为声呐探测的补充手段。
2.1.2.2 拦截应对可选方式
当海域舰船通过探测手段获取对方UAV群信息后,舰船指挥控制系统会对UAV群威胁程度作出判断,决定采取驱离对策还是予以拦截打击,这是防御体系中最为关键的部分。
(1) 反制空中无人机群可选方式:
1) 硬杀伤方式
传统武器:常规的硬杀伤舰载防空武器主要是防空舰炮和舰空导弹,二者主要用来进行舰船防空反导。使用舰空导弹打击UAV群,存在很多问题,一般导弹造价高昂且装载量有限,单个UAV价格则相对低廉,利用导弹打UAV如同大炮打蚊子,效费比很低,此外,若敌方UAV群具备低空飞行能力,会使部分导弹丧失打击能力。相比较而言,使用密集的防空舰炮(如密集阵系统)拦截UAV群成本相对导弹可降低很多。
新式武器:除了传统的防空武器,现已研制出许多新概念武器,包括激光武器、微波武器、电磁炮等。激光武器利用高能激光照射到UAV上,达到毁伤UAV的目的,具备快速、灵活、精确和抗电磁干扰等优异性能,缺点是受限于极端天气,不能全天候作战。微波武器可借助强微波波束能量毁伤无人机,具备一定的区域杀伤能力,对高密度UAV集群具有更好的杀伤效果。电磁轨道炮是利用电磁发射技术开发的高能、远程杀伤武器,可用于水面炮火支援、防空和反舰[5],可对UAV群造成杀伤。
从成本和精确打击角度考虑,还可以在舰上使用制导炮弹,利用先进制导技术辅助炮弹提高打击的准确性。
2) 软杀伤方式
除了采用硬杀伤武器拦截,还可以采用软杀伤方式应对UAV群。软杀伤武器通常不直接毁伤目标系统的硬件结构,但会使受作用后的目标系统功能降低或丧失。现有UAV集群作战要依靠通信导航技术,如无线电通信、GPS等,因此可采取电子对抗手段进行对抗,对敌方UAV群施加电子干扰或进行电子欺诈、诱骗,对其拦截和压制,己方出动的UAV群也可安装干扰设备进行抵近干扰拦截[15]。
3) 集群对抗方式
应对敌方空中UAV群威胁,最有效的方式是以UAV群对抗UAV群[16]。早在二战时期便有战斗机集群对抗的实例,现代UAV作战也是如此。在持续显示力量方面能够与一个UAV集群相匹敌的唯有另一个UAV集群。建设自己的UAV队伍,使得UAV群具备协同探测并共享探测信息、协同拦截作战、态势评估及自主决策能力,逐步提升集群对抗能力。
4) 其他方式
王虎等学者提出发展“幕”型拦截武器,提升对UAV的捕杀效能。“幕”型武器发射之后可在较大空间分散成幕状结构组织,可由地基或空基平台发射,是拦截和毁伤高密度、轻质量UAV集群的高性价比武器[1]。
由于小型无人机航程有限,需要其他搭载平台将其运输到指定区域投放,所以应对UAV群还可以采取“捣毁蜂巢”策略,对UAV群搭载平台进行精确打击,尤其是在UAV投放前进行拦截,可作为拦截UAV群的补充措施。
(2) 反制水下无人潜航器群可选方式:
常规的水下打击武器有鱼雷、水雷、深水炸弹等,对于UUV群可造成一定的伤害。一般而言,UUV续航能力有限,对母船有较大依赖性,可通过探测技术搜寻母船予以打击,或者采取措施迫使UUV与母船分离,使其在没有母船支持状态下丧失威胁。
针对多UUV集群,最好的应对方式是出动己方的UUV群去对抗,以彼之道还施彼身;此外,还可以采取水下电子战,干扰UUV之间或UUV与母船之间的通信。
2.2 舰船反无人机群总体方案描述
在前述探讨基础上,将舰船反无人系统集群总体方案从被动防御和主动防御2个角度考虑。
(1) 预警后被动防御
被动防御需要及时发现威胁目标,以便为后续拦截手段留下足够时间。
探测空中UAV群,采用以舰载雷达为主,以借助声音、视觉、热量和无线电等探测手段中的一种或几种为辅的方式,及时获取目标信息。
针对空中UAV群的拦截,提供2种应对方式。一是选择以近程防空导弹/舰炮、舰载制导炮弹结合新概念武器(激光武器、微波武器、电磁炮中的一种或几种)进行打击,打击之前做好火力分配计划及独立的应急打击火力点,此外,舰上应配备密集阵系统,做好UAV群突破到舰船近程火力距离范围的准备。二是采用UAV集群对抗敌方UAV群,UAV上可装备制导炸弹或导弹,必要时也可出动有人战机在保证安全的前提下与己方UAV群协同作战,击落或驱离敌方UAV群。在上述2种方式实施的同时,舰船上的电子战设备(或无人机群携带电子战设备)都应作为辅助手段配合作战,进行电磁压制或选择性干扰,破坏敌方UAV群的通信。舰船指挥与控制系统还应尝试探测敌方UAV群搭载平台的位置,采取“捣毁蜂巢”策略,进行远程防御。
对于舰船附近海域的UUV群,主要利用声呐设备进行探测,并结合星载雷达等海洋遥感技术作为补充手段。为拦截敌方水下UUV群,出动己方UUV群与其进行集群对抗,在己方舰船协助下(如母船发射鱼雷打击敌方UUV群)予以击毁或捕获。方案流程图与设想图如图3所示。
(2) 预先探测主动防御
在一些特殊情境下,为保证己方安全,可采取主动防御策略。
由舰船主动派出空中UAV群与水下UUV群,在舰船附近海域活动。空中UAV群携带机载雷达,水下UUV群携带声呐等探测设备,有条件可加装卫星导航系统(北斗),结合母船本身具备的探测设备,形成空中、水面、水下三位一体海空探测体系,在母船、空中平台与水下平台之间构建通信网络,实现探测信息共享。这将增大舰船防御体系的探测范围,有效提升整体预警能力,如图4所示。
当发现敌情后,在共享探测信息的基础上,由舰船指挥控制系统协调多种拦截手段进行协同拦截。我方已出动的无人系统集群进行集群协同任务分配,对敌方无人系统集群进行驱离或发动攻击,必要时采取自杀式攻击手段;同时母船应予以配合,对空发射制导炮弹或采用激光、电磁炮等精确打击武器,水下发射鱼雷或制导鱼雷,协助空中水下无人机群进行拦截。如能探测到敌方UAV群编队队形,可采取集中打击中心区域的策略。在此过程中,前述多种拦截手段如何共享利用探测信息,如何分配任务协同拦截,是指挥控制系统需要着重考量的问题。
另外,无论是己方还是敌方,未来母船、空中UAV与UUV三者间进行通信、导航的需求会日益增强。如何有效干扰三者之间的信息交流、对其进行电子干扰或欺骗,同时保护己方通讯设备,是构建防御体系的另一种思路。因此有必要进行认知电子战系统建设,并将认知电子战系统与无人系统集群相结合提升作战能力。
然而,需要指出的是,现有技术手段还不足以支撑这一探测体系,存在着很多问题,比如空中与水下的跨界通信问题,如何实现不同介质间的信息交流,仍需要进一步研究。此外,我方主动派出的UAV和UUV需要具备较强续航能力,战后舰船需要对二者进行回收,如何实现UAV与UUV长航时工作,如何做好战后回收,是需要解决的问题。

图3 预警后拦截无人系统集群流程图Fig.3 Flow chart of intercepting UAV and UUV swarms after detecting the goals
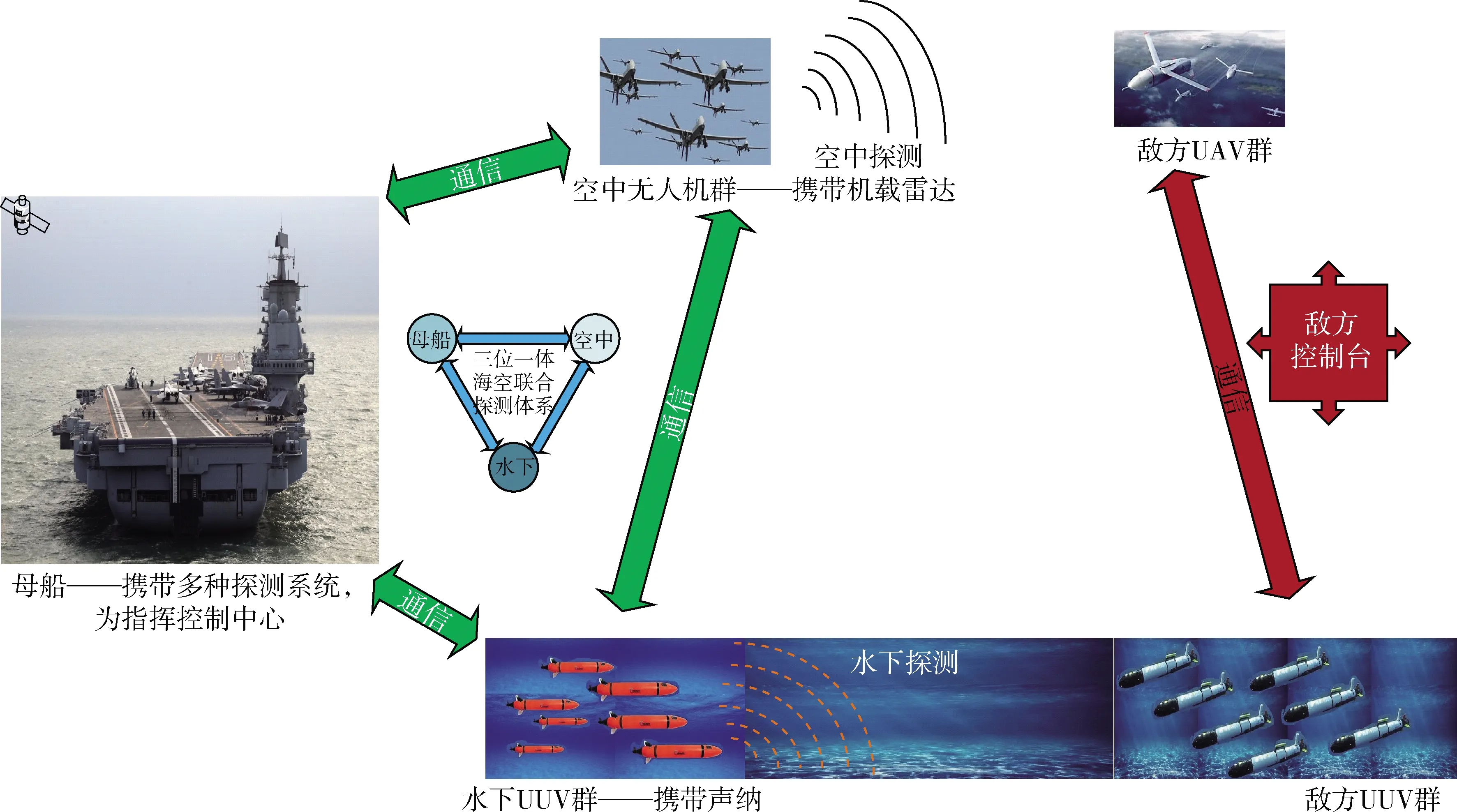
图4 预先探测主动防御无人系统集群设想图Fig.4 Illustration of pre-detecting UAV and UUV swarms before intercepting the goals
3 总结与展望
本文主要介绍了海域环境舰船遭遇来自空中与水下异构无人系统集群威胁时应如何应对的防御构想方案,给出了可行的探测与拦截方式,具有一定创新性,对于舰船防御体系建设具有一定参考意义。随着未来军事技术的突破,具备空中、水面、水下集群作战能力的智能化舰船逐步被研制和使用,相应的舰船防御体系建设也将更加完善。