站台门与列车车门间异物探测装置的探讨
2020-05-14侯妍君李鑫磊申樟虹
侯妍君,李鑫磊,申樟虹
(北京市市政工程设计研究总院有限公司,北京 100044)
0 引言
保障乘客的出行安全是轨道交通运营的重中之重。站台门的出现就是为了进一步保障乘客出行安全。为了保障乘客候车的舒适性与安全性,站台门在广州地铁2号线首次开始使用。随着使用频次的增加,站台门与列车车门之间的间隙逐渐成为影响轨道交通运营安全的区域。近3年来,北京、上海、青岛等地均发生有站台门与车门间隙夹人事件[1]。
为防止发生类似的安全事故,对站台门系统做了一系列的改进。在设备上,通过给站台门加上防夹挡板、防夹灯带等设施,从硬件上降低人员被夹的风险,增加异物被检测到的概率;在管理上,要求司机停站后需下车瞭望,降低事故发生概率。但以上方法在应对未来无人驾驶情形时显得非常无力。因此,有必要寻找检测效率更高、检测手段更加准确的机械检测方式。本文设计了一款新型异物检测装置,不改变其机械结构,有效地规避了传统异物探测装置最窄的安装空间,易适应曲线或直线站台等多种站台形式,增加了激光探测器的选择范围及发射光束的数量,进一步提高了激光探测装置检测的准确性。
1 线路防夹设施使用现状
早晚高峰时段,北京、上海、广州地铁长期处于高负荷运转。虽然规范已经优化了车门与站台门之间的间隙,但在大客流时段,依然存在列车关门瞬间发生物品或小孩被挤至列车车门与站台门之间的可能,有可能引发危险事故。为了保障乘客乘车安全,既有线路先后尝试了几种不同形式的防夹装置,下面对各种既有防夹装置的适用情况进行分析。
1.1 物理防夹装置
物理防夹装置主要包括灯带、防爬板和防夹挡板[2-4]。
(1)灯带
列车司机通过肉眼观察判断车尾灯带是否连续,确认灯带显示完整后方可启动列车。灯带的安装不得侵入车辆的动态包络线。目前,灯带装置应用于北京地铁7号线、9号线等多条线路。
(2)防爬板、防夹挡板
防爬板和防夹挡板位于站台门下部,以上两个装置的原理均为列车、站台门关闭时,若该间隙内有人员或物品,站台门无法关闭。由于站台门和车门存在联锁,若站台门无法关闭,列车不会发车。但该装置的防夹范围有限,若站台门成功关闭后,此时车门未关闭,乘客被挤压后退到车门外时,仍有夹人或夹物风险。
1.2 激光、红外防夹装置
激光、红外防夹装置包括红外对射防夹装置[5]、激光防夹装置[6]。红外对射防夹装置和激光防夹装置均是在站台门上加装激光或红外对射装置,一旦有人员或物品遮挡对射光线,即认为车门与站台门之间存在异物,触发报警装置。但该装置对环境要求较高,区间因轮轨磨耗等问题会存在金属粉尘等问题,且该装置安装于站台门上,受振动的影响较大,适应环境的能力较差。此外,为保证站台门检测的有效覆盖,该装置延站台纵向安装,检测装置的有效安装范围仅为限界允许的25 mm,安装空间狭小,也就造成其检测空间十分有限,激光束多为单束多点对射,仅可保证对射区域的安全,无法全面覆盖检测区域,存在较大的检测盲区。综合以上原因,该类型防夹装置的误报率较高。
1.3 应用问题
目前,物理防夹装置和激光、红外防夹装置均无法做到无死角检测站台门与车门之间的间隙。在既有线路改造过程中,加设防夹装置均需要核查既有线路的设备限界,核查难度较大。此外,防夹装置均安装于轨行区部分,工作环境较差,易受到车辆运行振动、风压等影响,导致检测区域出现偏差,出现检测盲区。部分物理检测装置仍需要依赖站务员或司机的配合,难以适应未来无人驾驶的环境;而激光、红外防夹装置在检测上对环境的要求较高,误报率较高。因此,站台门与车门之间的间隙探测装置仍具有较大的发展和研究空间。
2 新型站台门异物检测装置的设想
根据以上分析,物理防夹装置和激光、红外防夹装置在使用环境上要求较高,检测覆盖范围相对较小。为了解决上述问题,设计了一款新型防夹装置,可有效检测站台门与车门之间的间隙[7]。
该装置由异物检测装置A、线路传输装置B、位置显示装置D组成,如图1所示。异物检测装置A对称地放置在站台门两侧,并自动检查站台门与列车车门之间是否有异物,检测信息经处理后,通过传输装置B传送到显示装置D,借助显示装置D显示故障信息。
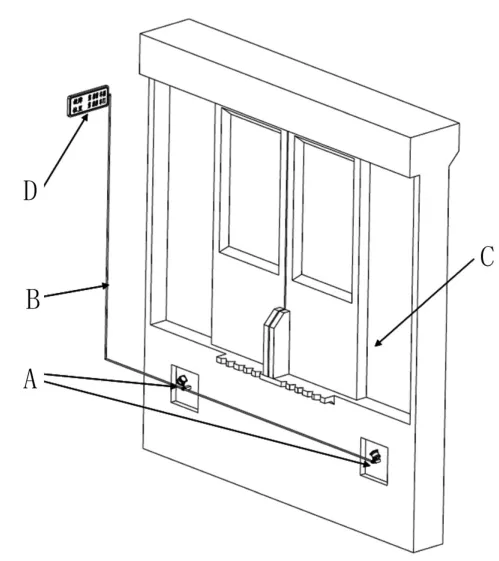
图1 新型异物检测装置

图2 异物检测装置详图
如图2所示,检测的关键部件异物检测装置A是由前盖A4、外壳A7、玻璃挡片A5、激光测距传感器(内部)、电路板(A6内置)、后盖A6组成。由于激光检测装置对工作环境要求较为苛刻,因此,需将激光检测装置放置于A7外壳内,保证其有一个较为干净整洁的工作环境。考虑到目前地铁列车多为鼓形车体,站台以下部分限界向轨道中心线处收缩,设备限界与站台边缘之间存在异物检测设备的安装空间。为进一步保证本装置不侵入设备安装限界,在站台门底部向下800 mm位置开槽,并将A1固定于底部安装槽,进一步减小本装置的安装空间。
装置安装完成状态如图1所示。A7内的激光测距装置经调试后,刚好避开站台门下部毛刷等障碍物,打到站台门中部位置,以保证本装置可正常使用。
当车门与站台门关闭后,异物检测装置开始工作,通过安装在站台板下A位置的激光探测器装置发射测距激光,快速检测并判断该缝隙中是否有物体存在。当激光探测装置检测到由异物存在时,将该信号传递至放置在站台上的屏幕显示装置。由于该组激光探测器为每个门安装一个,因此,站台侧的显示屏D上会显示具体几号车厢的第几个车门出现故障并报警。列车员发现故障后,由列车员就地处理或通知车站工作人员对出现故障的车门进行处理,待清除异物并确认安全后,车辆出站,异物检测装置关闭。
目前主要激光测距技术包括脉冲法、相位法、干涉法三种[8]。不同方法间优势劣势对比如表1所示。
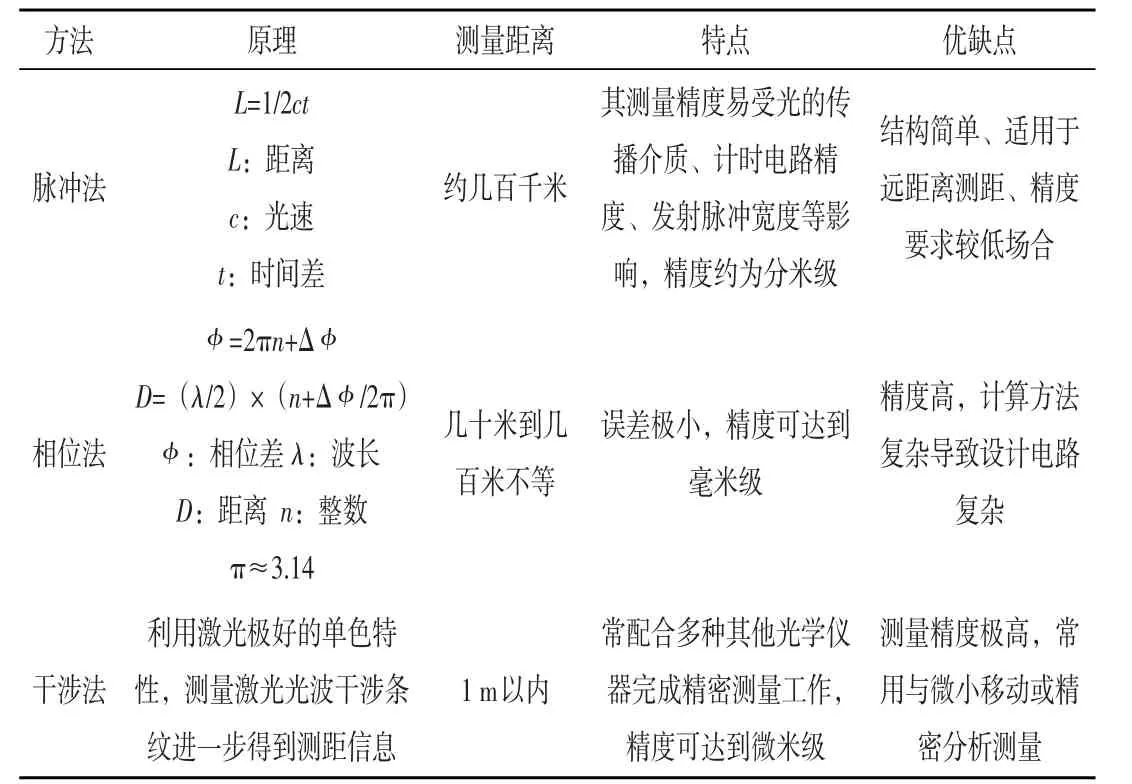
表1 脉冲法、相位法、干涉法对比分析
经过上述对比分析,地铁车站的单侧站台门长度多为200 m左右,适合采用相位法完成测距。因此,上述装置中激光探测器的主要工作原理为:利用相位法进行距离计算。
由于发射端至乘客或其他遮挡物品的相对距离较近,在激光传输过程中,受到环境介质、光衍射角的影响较小。激光发射过程中,激光发射端发射光较为密集,可理解为是由多个小光点组成的一个大光点。在行走过程中,发射端至目标端形成一个线性的光斑,该光斑是由多个激光点漫反射组成的,如图3所示。当光斑到达障碍物后,同样通过光的漫反射至接收端,通过两个波段之间的相位差,计算出障碍物距离探测器之间的长度,原理如图4所示。

图3 激光漫反射路径
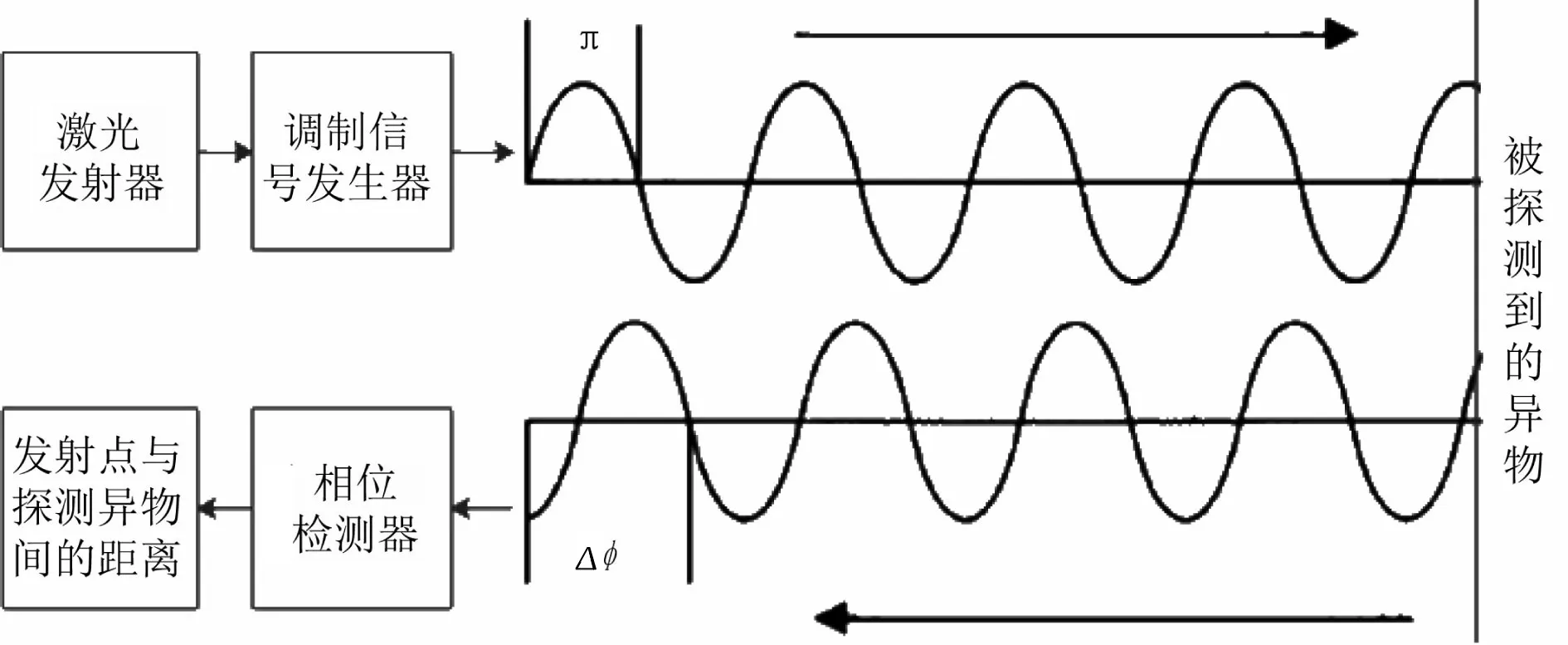
图4 相位法测距原理
由于异物组成远大于激光发射光点的大小,若激光探测器的接收端收到较为密集的光点,则可证明该间隙中存在异物。若无法收到光点或收到非常少量的光电,即可证明该间隙中不存在异物。
传统探测器通常安装于站台装修面完成面以上300~900 mm[9]。传统探测器因受鼓型车体及站台门设备限界限制,导致其安装范围异常狭窄。其激光探测器的原则局限范围较大。而本设计方案安装于站台门下端,有效规避了限界最窄范围,为设备的安装寻找到较大的空间,增大了激光传感器的选择范围,发射激光束的圆截面比传统探测器更大,检测的准确性更高。
3 结束语
经过上述分析可知,因受到车辆限界及站台门安装范围的限制,异物探测装置的安装范围非常有限,由此导致的激光探测器发射的光束相对非常局限。本文设计的探测装置有效规避了传统异物探测装置最窄的安装空间,且该装置安装于站台板上,受车辆走行振动的影响较小。较大的激光探测器安装空间有效增加了激光探测器的选择范围及发射光束的数量,进一步提高了激光探测装置检测的准确性。该装置为站台门与车门之间的异物探测装置提供了一套新的解决思路及解决装置,可应用于无人驾驶列车,适应范围较广,可实施性较强。
