基于SimHydraulics的阀控对称液压缸仿真
2020-05-14周小浩张莺莺
周小浩,张莺莺
(1.长安大学工程机械学院,西安 710064;2.兰州理工大学电气工程与信息学院,兰州 730050)
0 引言
常见的液压伺服系统在研究其动态性能时,往往需要根据液压系统的工作原理建立数学模型,对非线性方程线性化,后经拉氏变换后求出其传递函数[1-3],再对液压系统添加不同控制策略,在Simulink等软件中构建系统框图进行数学仿真,根据仿真结果对系统进行改进,直至动态特性满足要求。然而在一些复杂系统中需要调节或者改变系统的控制方式时,需要从新建立数学模型,从而降低了设计效率。
本文通过研究阀控对称液压缸的转向伺服系统,得出在SimHydraulics仿真环境下的物理仿真的一般方法,并比较不同控制策略下液压伺服系统的动态响应性,由此提出了基于SimHydraulics不同控制方式的液压物理仿真设计、性能分析、模型验证的方法[4]。
1 液压系统与SimHydraulics仿真
1.1 系统描述
待仿真液压系统原理如图1所示,主要部件有中位机能为O型的零开口四边滑阀、双作用液压缸。x为滑阀的阀芯输入位移,y为液压缸的实际位移,yg为给定的液压缸位移。给定负载的总质量M=40 kg,黏性阻尼系数B=300 N/(m s)。
1.2 建立SimHydraulics仿真框图
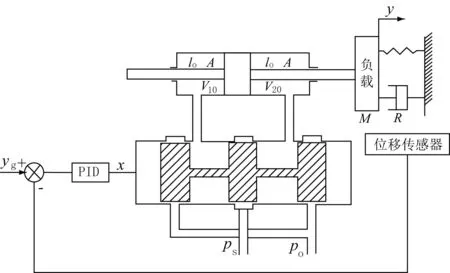
图1 液压伺服系统原理图
SimHydraulics是隶属MATLAB和Simulink液压动力与控制工程工程设计和仿真建模环境。隶属于MATLAB的SimHydraulics模快主要用于液压和液压工程机械的物理建模,它分析过程透明直观,有大量的液压元件、机械元件模型和基本机械运算单元可供选择,并且可根据实际情况选择常用液压油工作介质。本文分别构建了基于SimHydraulics阀控对称液压缸的PID闭环控制、模糊PID控制[5],如图2、3所示。需要特别说明的是仿真过程中,液压泵采用压力为11 MPa的理想恒压泵,比例阀电磁铁的时间常数取0.001 4 s,远小于整个系统的时间常数,可以忽略它对系统动态的影响。
1.3 仿真
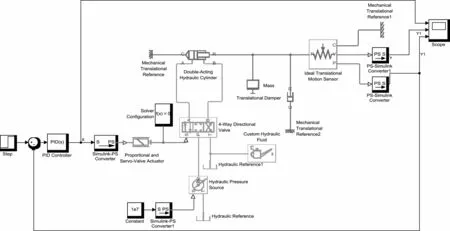
图2 PID闭环控制框图

图3 模糊PID控制框图
液压系统参数如表1所示。设定PID控制器的Kp=0.004 5,KI=0,KD=0,模糊PID控制器采用2输入3输出,其输出规则如图4所示。设定油缸位置给定值为yg=180 mm,不同控制策略的仿真结果如图5、6所示。从仿真结果来看,闭环PID控制系统响应时间为0.5 s,模糊PID控制的响应时间为0.4 s,PID控制下油缸速度在趋于平稳过程中波动较大,且在液压系统稳定调节过中PID闭环控制系统调节实时间较长,而模糊PID控制调节时间短。
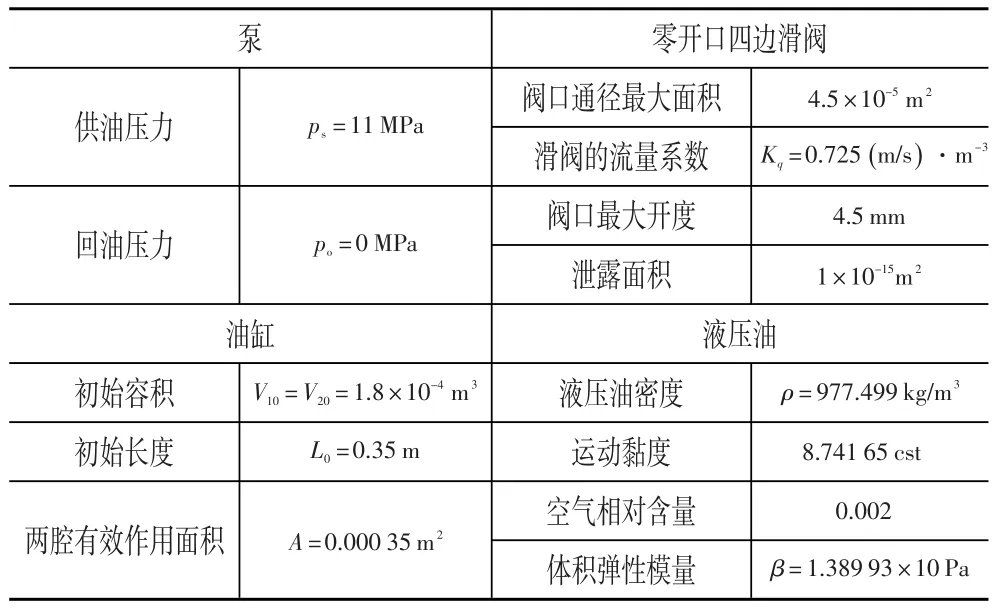
表1 液压系统仿真参数表
从模糊控制的原理分析,模糊控制是基于语言变量的非线性控制,其模拟的是现场操作人员,因而使得控制策略易于接受和理解,且和常规PID比较,模糊控制系统鲁棒性好,干扰和参数变化对系统动态响应的影响不大。一般来说,模糊控制将人的经验综合其中,相当于给PID加入非线性化调节器,而液压系统一般为非线性系统,理论上模糊PID控制比PID控制更为适用液压系统。
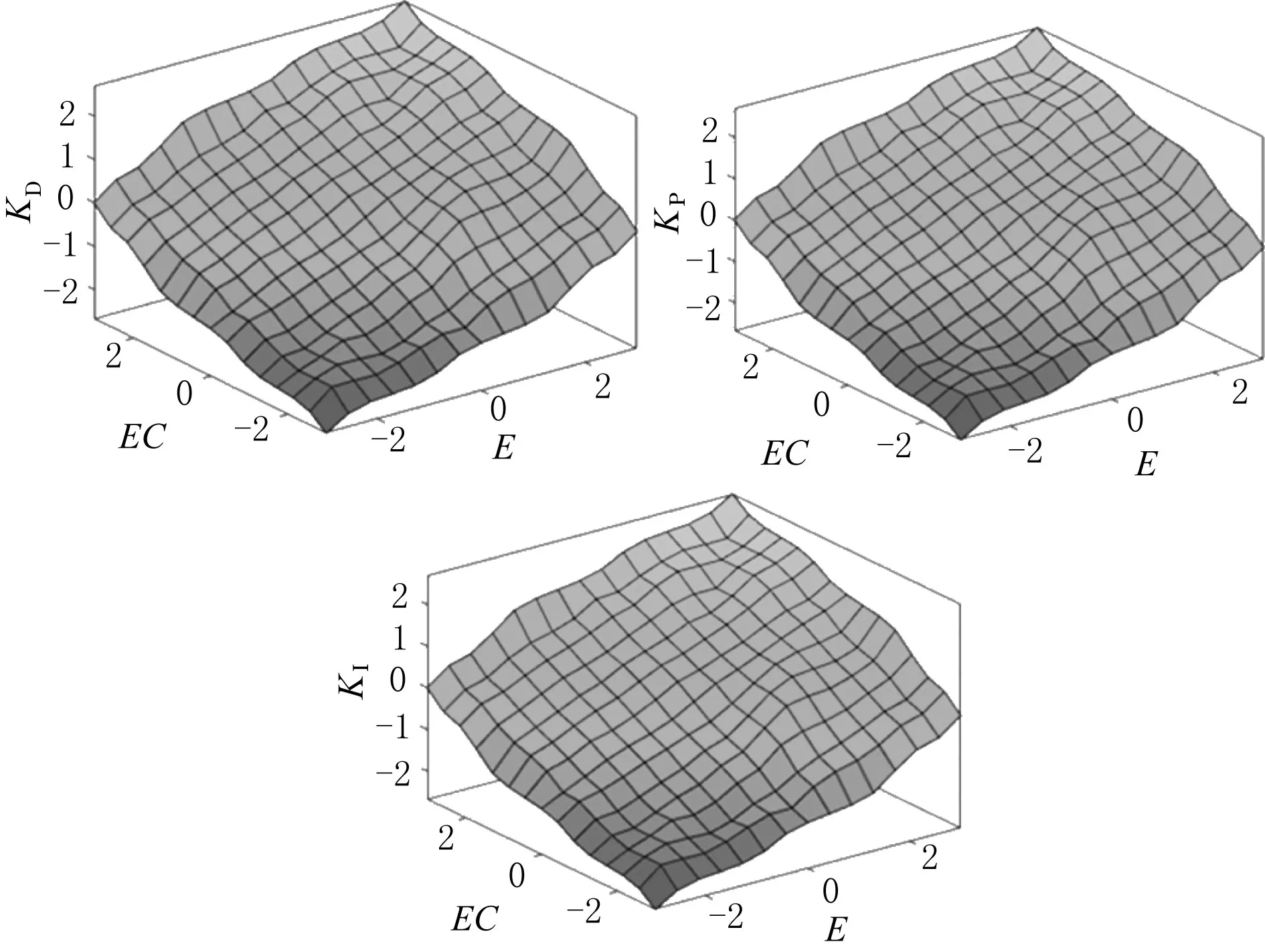
图4 模糊控制器K P,K I,K D输出规则

图5 PID闭环阶跃输入动态响应
图6 模糊PID控制阶跃输入动态响应
2 机理建模与Simulink仿真验证
由于液压系统模型相同,故以下只对模糊PID模型进行建模和验证。针对上述液压系统,文献[5-7]采用了先建立数学模型后仿真的方法,建模一般采用数学建模的方式。根据文献[2]可得公式(1)~(3):

式中:X,Y,Yg分别为x,y,yg对应的拉氏变换;ξn为液压阻尼比;ωn为液压系统固有频率;液压缸总容积V0=V10+V20;总流量-压力系数Kca=Kc+Ci+(Ce/2)。
将系统参数代入,可得[8]:


构建系统仿真框图如图7所示。

图7 机理建模仿真框图
为了方便观察物理键和数学建模仿真结果,将物理建模和数学建模的仿真结果进行了对比,其结果如图8所示。

图8 物理建模与机理建模对比
由图可知,物理建模与数学建模仿真的结果接近,由于数学建模时忽略了液压泵、阀的泄漏系数,从而使得数学建立的模型的阻尼比较小,导致Simulink模型仿真的油缸速度超调量较大;物理建模和数学建模的结果近似,故基于Sim-Hydraulics液压伺服系统能够提高液压系统设计的效率和准确性。
3 基于SimHydraulics的综合仿真
3.1 基于SimHydraulics物理仿真和Simulink数学建模仿真比较
物理仿真与数学建模仿真的特点不同,数学建模首先是建立数学模型,然后根据液压系统工作原理和相对应的数学模型,通过拉氏变换求其在频域的传递函数,借助Simulink进行数学仿真,通常需要大量的计算。而通过SimHydraulics仿真,构造元件实物模型和模拟实际模型搭建仿真框图,只要元件参数设定无误就能得到正确的仿真结果。综合比较,在未建立液压系统数学模型的情况下,通过运用基于SimHydraulics物理仿真能够给减少设计错误。其实采用不同控制策略就是上述仿真的案例,在此液压系统中,我们可以很容易对液压系统的结构和控制系统的方案进行实时更改,例如:采用不同的控制方式,比较不同控制方案的仿真结果,选择出合适的控制策略,也就是综合应用了Simulink与SimHydraulics的优势。
3.2 SimHydraulics物理仿真的应用方法
通过对阀控液压缸案例的分析,可以得出综合应用Sim-Hydraulics进行不同控制策略仿真的一般工作步骤:
(1)根据已有的液压原理图构造基于SimHydraulics液压系统物理模型;
(2)设计相对应的控制模块,并在Simulink添加相应的液压控制模块;
(3)根据设计的液压系统分别添加控制参数如KP,KI,KD和液压系统参数;
(4)调整液压系统控制部分使液压系统动态特性满足要求。
4 结束语
本文对一实际的阀控对称缸液采用不同的控制策略,在此基础上比较总结出了不同控制策略对阀控缸的位置的动态响应,得出了模糊PID控制方案优于PID控制。并总结了应用Simulink中SimHydraulics元件库中的液压伺服元件仿真的一般方法,该方法在工程实用具有指导意义。在构造液压元件的基础上,通过数学建模仿真验证了物理建模仿真的可行性和正确性。综上应用SimHydraulics液压元件库,可使液压伺服系统的控制模块和液压模块设计同时进行,也为复杂的液压伺服系统提供分模块化设计的方法,能够有效提高设计的效率和准确性。
