基于单片机的智能避障实训车教学设备的研制*
2020-05-14陈金阳张朝晶
王 敏,王 辉※,陈金阳,张朝晶
(1.盘锦职业技术学院,辽宁盘锦 124000;2.盘锦市教育装备工程技术研究中心,辽宁盘锦 124000)
0 引言
随着中国科学技术的飞速发展,工业生产向智能化和自动化的方向发展,单片机作为一个嵌入式系统,由于体积小、能耗低、可靠性高、集成度高的特点广泛应用在通讯、仪表仪器、工业控制、医疗等领域,单片机已成为人们生产、生活的必需品,社会对单片机技术高技能复合型人才的需求日益增长,迫切需要高职院校对单片机技术深入研究[1]。为此,本文研制一种适合高职学生学习单片机技术的智能避障实训车教学设备非常重要,通过自主研制智能避障实训车教学设备,使学生熟悉单片机在机电一体化技术的综合应用,熟练掌握开发复杂单片机系统的一般方法,将教学紧密与企业生产实践结合,培养学生一线工程实践能力、科技创新能力[2]。
1 教学设备总体设计
智能避障实训车设备的研制过程可以看成一个完整的实际工程项目实施流程。以“双元制”教学模式中的培训模块的设定就是通过一个实际的工程项目为实训载体,将工作中所涉及的各专业课程理论和所需的专业技能有机融合并充分体现在实践行动的各个环节,让学生在“做中学,学中做”有利于学生尽早适应岗位环境[3]。智能避障实训车教学装置主要由电源模块、红外检测模块、声光报警模块、主控模块、电机驱动模块,实训车车身选用铝材作为车体材料,采用AT89C51单片机作为控制器,以直流电机作为驱动,传感器作为检测并搭配避障、声光报警、运行指示、短路过载保护的功能,从车身设计制作到电路控制功能的实现涉及到机械制图、机械加工、单片机技术、电气控制、C语言程序编程、电子焊接等多个学习领域知识和技能,从制定工作计划、完善工作页到整理数据、交付技术资料旨在培养学生的职业素养,系统的总体设计方案如图1所示。
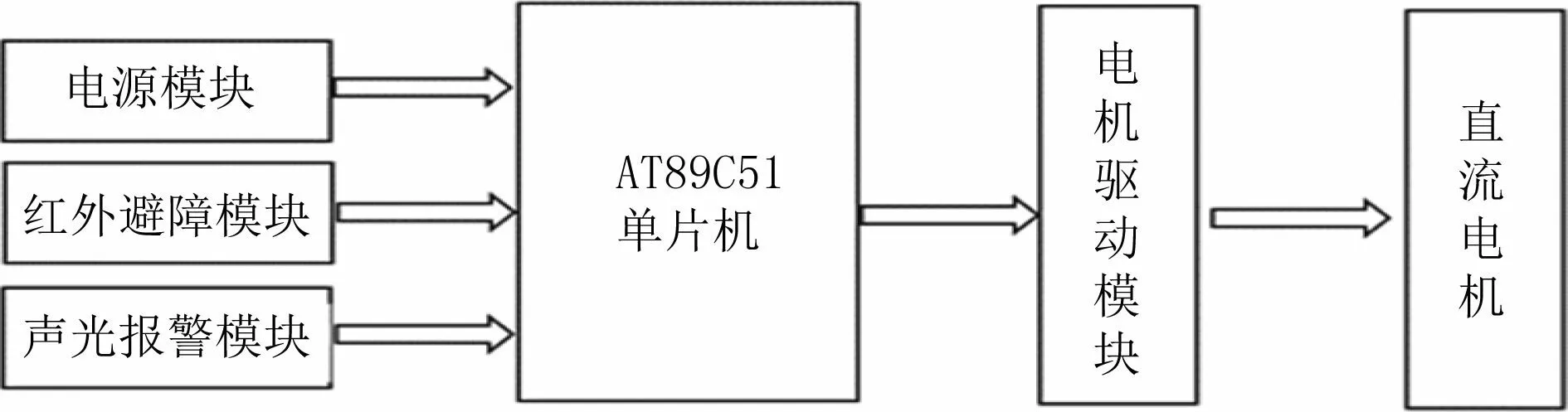
图1 系统总体设计方案
2 系统硬件设计
2.1 机械单元设计
制作智能避障实训车车体结构的材料选用铝材合金,铝型材具有很高的塑性,易于加工,可制成各种型材、板材,抗腐蚀性能好,利用车床、铣床等机床设计并制作智能避障机器人的车身。车体的外观仿照实际汽车结构,机械部分制作的部件主要有:底座、挡板、侧板、车窗、顶盖、保险杠、减震块、横梁、4个轮胎位等,严格按照工件的机械加工常规技术要求进行硬件原理图的设计与零部件加工,同时考虑绝缘、美观、适应等性能,设计实训车外观如图2所示,顶盖机械加工图纸如图3所示,实训车实物如图4所示。
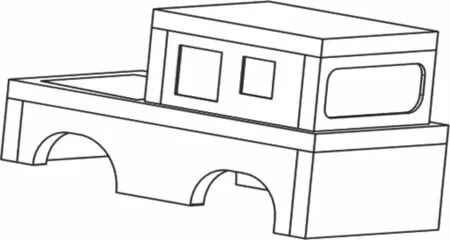
图2 智能避障实训车车体外观图

图3 顶盖机械加工图纸

图4 实训车实物图
2.2 电子单元设计
2.2.1 电源模块
系统采用的DC-DC的供电方式,考虑到5 V空心杯直流电机对电源的要求,选用12 V,3 000 mA的锂电池供电,系统其他模块供电的5 V电源由降压模块LM2 596转换供给。
2.2.2 红外避障模块
智能避障实训车安全避障的方法主要有超声波避障、红外传感器避障、激光雷达避障等方法,对于本文研究的机器人来说,只需完成较近距离的正面阻挡物躲避任务即可,所以选择漫反射式红外光电传感器。在车头处按照“棕正蓝负黑信号”的接线方式[4],安装4个传感器,控制器接收传感器发送来的信号,若前方路况良好,信号也为低电平,小车正常行驶;若前方由障碍物阻挡,电压信号为高电平,小车减速或转弯行进。
2.2.3 声光报警模块
声光报警电路在控制器的控制下,在前方遇到障碍物后发出3 s的声光报警,单片机I/O口配合放大电路的驱动蜂鸣器工作,灯光报警靠发光二极管实现,工作电流相对较小,直接靠单片机的端口驱动,当相应输出口为高电平时,LED点亮,发出光报警;当输出口为低电平时,LED熄灭,光报警解除。
2.2.4 电机驱动模块
系统采用5 V空心杯直流电机控制小车,电机驱动模块采用“H”桥大功率双路驱动模块(3~53 V电压可调)[5],空心杯电机专用驱动器,配合空心杯电机十分理想。空心杯直流电机一般需要60 kHz的PWM频率,此款驱动器已经设计到200 kHz的超高开关速度。驱动器单电源输入电压范围是3~53 V可调,此驱动器还具有的刹车功能可迅速将电机刹住,刹车迅速,制动明显,实现此功能操作简单。以上电路模块的实物图如图5所示。

图5 电路模块实训图
3 系统软件设计
该设计以智能避障实训车为对象,要求其能够实现以下功能:按下单片机处理器启动按钮后,如果前方没有障碍物,智能避障小车开始运行,运行时,传感器实时检测前方信号,当检测到前方有物体有信号返回时,传感器将输出信号发送给单片机处理器,智能避障小车发出3 s音乐提示操作者,并且发出PWM信号给电机驱动模块使小车转弯避开障碍物[6];按下单片机处理器停止按钮,单片机处理器PWM停止输出,电机驱动模块输出0 V,智能避障小车停止运行,实训车软件系统靠C语言编程语言实现,主要思路是将每个功能的程序驱动写成相应的子函数,上述具体动作靠主函数调用相应的子函数实现,系统的程序流程图如图6所示。

图6 程序设计流程图
4 结束语
本文介绍了一种在“双元制”教学模式下,遵从“咨询—计划—实施—运行”模式[7],基于单片机技术的智能避障实训车教学设备的设计。经过多次调试,智能避障实训车能够完成控制要求的相应动作,能够进行正常行进,并且实现智能躲避障碍物进行声光报警的功能,设计达到预期效果。目前,该实训设备已经运用在机电一体化专业培训模块的教学实施中,学生以小组讨论、团队合作的方式,完成资料收集、任务计划、任务实施、行动记录等任务,该实训车将机械加工技术、单片机技术、信息通信技术及传感器技术有效地融合在一起,基本实现在整个学习过程中能够培养学生职业素养、团队精神以及严谨的工作态度。学生在本项目学习后掌握了理论知识练就了专业技能。同时,培养了大学生自主学习和解决工程问题的能力,也提高了大学生创新创业的质量,为学生今后的就业奠定坚实的基础。
