水上救援机器人的设计
2020-05-14杨健玮龚椿彭姜逸川潘伟文何伟锋
杨健玮,龚椿彭,姜逸川,潘伟文,何伟锋
(东莞理工学院机械工程学院,广东东莞 523808)
0 引言
在如今的城市景区公园建设中,大多数情况下都有湖畔区域的建设,为了保证游客的人身安全,湖畔边缘都尽可能设置一定高度的安全围栏。虽然具备如此安全措施,但仍会有一部分游客因为某些原因而跨越围栏,并不幸落入水中,有些湖畔区域半径较大且游客稀少,事故发生后并未被发现,从而导致救援人员无法及时赶到进行救援。对于此类情况,本文设计的水上救援机器人在水域巡航时只要发现以上状况,便能灵活快速地行驶到该事故区域,对落水人员实施救援行动,这样就能赶在救援人员到达之前实施前期救助,为落水人员争取宝贵的救援时间。
1 水上救援机器人的结构设计
水上救援机器人的船体采用了高韧度ABS材料和环氧树脂(防腐、防湖泊生物污染)制成,坚固耐用。船身采用斜V型构造,具备线型中央底部构造,从而能够在水的浮力作用下悬浮于水面而不沉[1]。动力装置安置在船体尾部,采用汽油发动机,汽油发动机是以汽油作为燃料,将内能转化成动能的发动机。在保证有充足的动力条件下,船体尾部配置有螺旋桨,对整体进行前进驱动。船底前端设计有舵机,由步进电机驱动,以配合螺旋桨进行转向行驶。救援船体两侧分别配置两个救生圈,并设有弹射装置,通过超声测距得出船体与落水者的距离,准确弹射出救生圈到落水者附近。前端设置有红外线探测传感器探头,以仿照机械臂的结构,在各转动副上配置电机,通过旋转实现多角度的探测[2]。具体结构如图1所示。
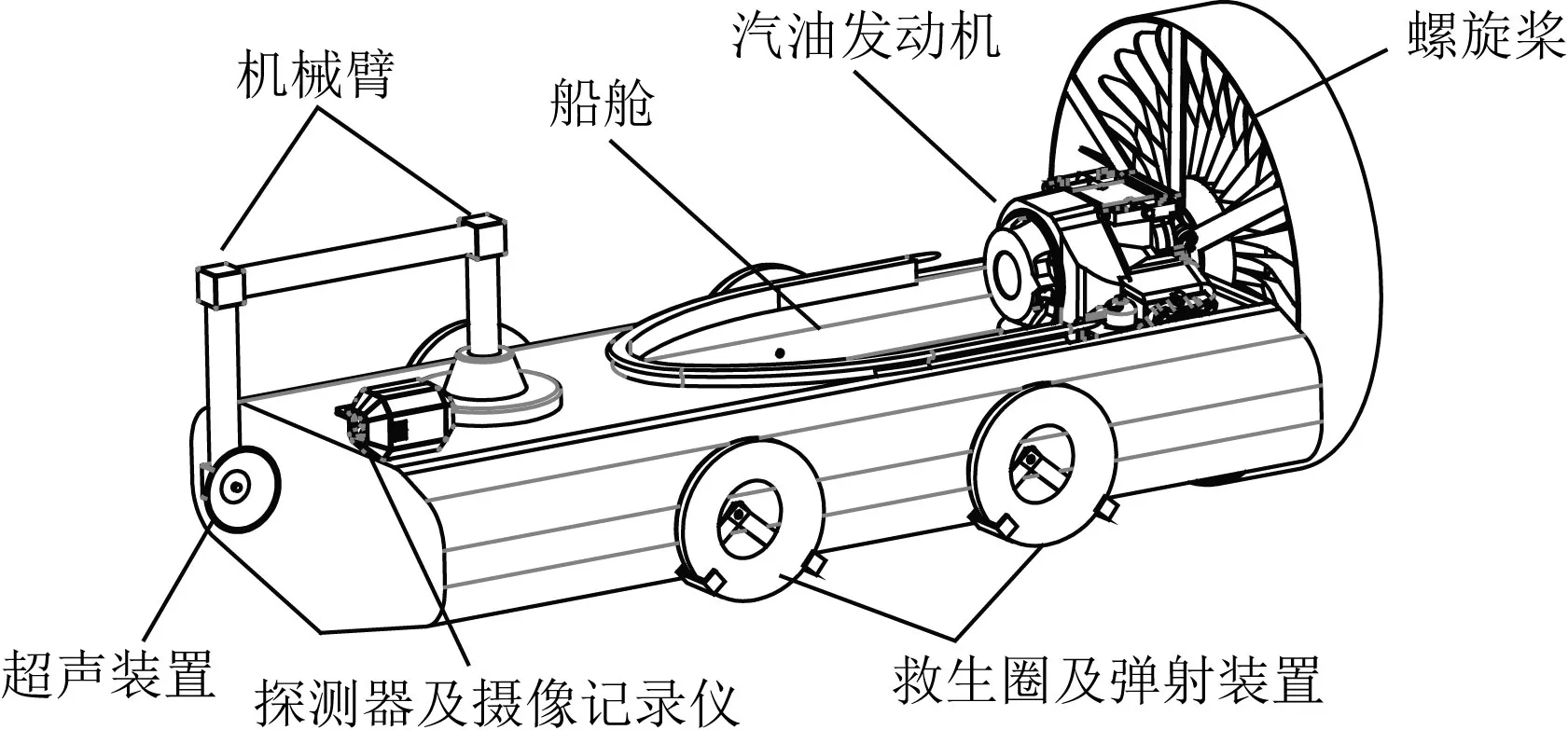
图1 水上救援机器人结构图
2 水上救援机器人的工作流程
水上救援机器人的工作状态分为自动巡航和人机遥控控制两个模式。当模式为自动巡航时,在救援机器人的控制系统中编好巡航轨迹,按照设定好的航行轨迹进行巡逻,同时前方的红外线探测传感器运行工作,对湖畔区域进行扫描,通过自身摄像头和内存记录行驶数据。当探测到落水者险情发生时,探测器监测到大幅度动态险情影像,锁定险情方位,修正船体运动方向后快速向事故位置驶去,同时响起警报和通知救援人员[3]。当到达落水者附近后,弹射装置根据实时距离弹弹射出救生圈对落水者进行前期救助,落水者拿到救生圈后,弹射装置对绑在救生圈的引绳进行收回,使落水者到达船体。落水者在恢复体力的情况下,可自行爬上船舱等待救援人员到来。
在人机遥控控制模式下,救援人员通过遥控器精确判断落水者的方位,遥控救援机器人快速达到指定位置,弹射出救生圈,实施前期救援[4];当落水者套上救生圈时,可遥控船体拖动落水者靠向岸边,完成救助。
3 水上救援机器人控制系统设计
由于救援机器人需要实现快速确定到达指定位置的要求,为使各部分功能相互不干扰,需将各个功能进行模块化。船体上的控制系统硬件框图如图2所示。其中采用电源模块12 V的锂电池进行供电;核心控制采用微控制器,控制救援船体的各功能协调运行;舵机控制船体的运动方向,其驱动采用步进电机控制,反馈采用反馈传感器;采用测距模块来实现距离判定及规避障碍的功能;无线通信与测距模块采用NanoPAN5375芯片模块组成[5]。遥控器采用单片机,通过接收遥控船体的运行状态和运行参数,通过遥控器上的LCD屏幕动态显示。
(1)电源模块。船体由12 V锂电池提供电源,锂电池经过电源转换模块后可以提供2.5 V、12 V两种不同规格的电压。其中2.5 V用于提供无线通信与测距模块电压,12 V用于嵌入式主控板。电源模块是救援船体的动力来源,为控制系统提供电力保障。
(2)核心控制。为满足救援功能,要求船体具有高精度航速控制、灵活的方向控制、实时动态反馈功能,并具有防撞保护。该系统中的所有任务要求由1个CPU完成,因此采用了嵌入式主控板[6]。
(3)舵机确定。舵机是确定船体运动方向的关键,如果运行路径与指定航线偏差往往能导致救援船无法到达指定位置进行求援作业。本系统舵机控制采用步进电机驱动,步进电机驱动与舵机采用齿轮啮合传动方式,反馈传感器直接安装在舵机的轴上作为位置反馈,进行位置闭环控制,精确控制船体舵机的方向[7]。
(4)运动模块。救援机器人的前进后退的运动由汽油机提供动力支持,通过加装运动控制传感器,以遥控指令的方式对救援船的螺旋桨的转速加以限制,使其能在规定的路线上行进或停止。船体方向通过步进电机放大器,控制步进电机的转速来控制舵机进而使得救援船转向。
(5)电路设计。嵌入式主控板采用高度集成的芯片,目的是为了实现对电流采样和数据传输等功能。嵌入式主控板主要就是实现CPU的功能,通过它来协调运动模块、无线通信与测距模块和监视无线等模块的执行情况。同时主控板还有一个重要的外围电路,它主要包括电源电路、晶振电路、复位电路等,通过它们与各个模块进行连接。
(6)无线通信与测距模块。本系统采用具有测距功能的无线模块,在完成遥控功能的同时可以完成测距功能,可以根据测距信息完成无线定位功能。由于救援船是通过抛救生气垫的方式来实现其主要功能的因而其测距精度要求并不是特别的高,而该救援船的测距功能不应只局限的单一方向上的,又要求具有一定的精度,综合各方面的考虑,因此系统采用基于NanoPAN5375的定位方法[8]。
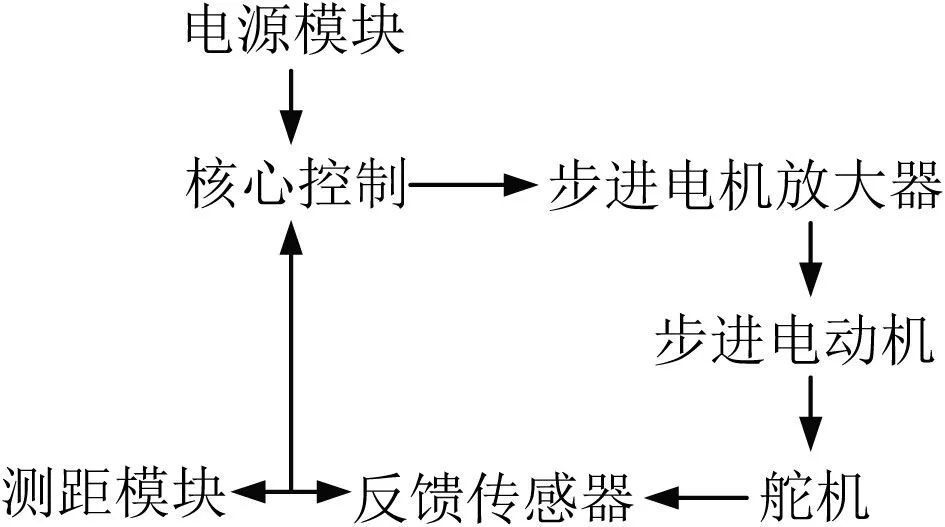
图2 水上救援机器人的控制系统框图
(7)监视无线模块。因为救援船在行驶的过程中的控制是通过无线信号进行遥控,就是需要利用无线电波来传输指令等信号。而监视无线模块主要的作用就是接收新的指令进确定的寄存位置中同时不断读取无线模块状态寄存器状态当显示有数据到达时,读取缓冲区的数据[9]。
4 系统的运行调试
该水上救援机器人的系统测试主要测试3个模块:控制、软件、硬件。首先先试运行一遍系统的人工控制,确保系统在开端、持续运行、停止3个阶段能够流畅接通运行;第二步对软件进行调试,使船体的运行计算和无线通信阶段能够准确无误完成,并反馈到终端;最后对硬件进行最终的检查,经过试下水运行后,可以按照要求在水面上行驶,基本可按照预定要求完成工作。综合这3个模块的测试,克服环境阻力的情况下该救援机器人能够及时到达落水者处,并且不对落水者造成二次伤害。
5 结束语
本文针对目前各个设有湖泊区域景区的救援人员不足的需求,结合传统的遥控船构造设计出一种具有自动巡航检测、快速遥控并弹射救生圈的水上救援机器人。该水上救援机器人最初由SolidWorks软件绘制模型、装配,进而购买材料进行组装、编程和调试,最终制作完成。通过在周围景区的湖泊水域上,对设计的此款水上救援机器人进行相关测试,基本满足救援要求。该水上救援机器人设计便携轻巧、使用简单、安全性高,其本身具有红外感应装置,可快速定位搜寻落水者,争取更多的救援时间[10]。
