机械臂喷涂应用设计探索
2020-05-13郑长源
郑长源
(中国矿业大学(北京),北京 100083)
机械臂作为一种高精度,多输入多输出、高度非线性、强耦合的复杂系统,逐渐应用于工业制造、医学治疗、娱乐服务、军事以及太空探索等各个领域中,给人类的生产生活带来了巨大的便利。随着人类对机械臂的需求不断提高,机械臂也逐渐集自动化、精密机械、传感器、电子、计算机等技术于一体,往智能化自主化的方向发展。本文主要研究一套航空零件的喷涂机械人来完成零件的喷涂工作,其主要性能参数有:简单零件,占比75%,通过机械臂一次性顺利喷涂,保障漆膜厚度在75 ~80 微米;较复杂零件,占比24.5%,通过机械臂实现除特殊点位的其他范围喷涂,保障特殊要求的漆膜厚度。
1 整体设计
1.1 系统主要解决的问题
(1)人工喷涂对零件镀膜厚度控制相对较差,无法保证厚度均匀。
(2)因人工无法避免喷涂色差,在航空零件等特殊零件上无法保证产品质量。
(3)喷涂过程中挥发有毒气体,对人体造成危害。
(4)提高喷涂工作效率并降低过喷涂量和清洗溶剂的用量,提高材料利用率。
1.2 系统整体技术路线方案(如图1)
(1)结合目前机械臂喷涂的研究现状,进行功能和结构分析,构建系统框架,制定可行方案。
(2)对喷涂机械臂及配套等设备选型,包括防爆喷涂机械臂本体、喷枪及供漆系统等;对机械臂控制器自行开发设计,使用PLC 控制器和力控组态软件实现现场控制和上位机监控。
(3)选用阵列式相机,通过从不同角度提取工件表面图像,获取工件特征,通过特征重构和3D 成像,建立零件的三维立体模型。
2 软件设计
软件设计是整个机械臂喷涂系统的重点和难点,除了满足机械臂精准控制外,还需要利用数字图像技术对零件进行识别,实现三维建模重构,并与数据库匹配,从而获取零件信息,最后,机械臂完成喷涂轨迹规划。
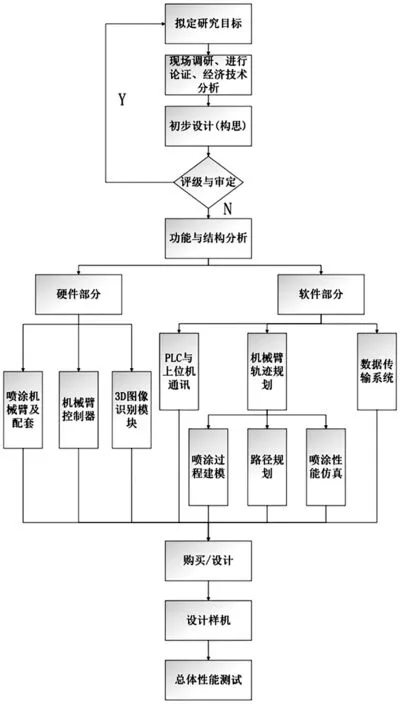
图1
2.1 图像识别与建模
(1)图像采样:使用根据实际喷涂需求的事件响应,拍摄尽可能高分辨率的一组图片。
(2)特征点提取:检测极值点,获得尺度不变性;关键点精确定位;过滤噪声点;分配关键点方向;生成特征点。
(3)角度定位:采集设备拍摄时所处的三维空间坐标,以及视角方向,得到视锥模型在空间中的位置。
(4)建立初始模型:图片进行初始分割,利用图片生成的视锥求交得到轮廓,通过轮廓信息作为图像分割的初始跳进得到初始的剪影,剪影所形成的视锥在空间中求交,即可得到一个初始的三维模型。再根据分割结果的准确性,对模型修正,纹理映射生成最终模型。
2.2 数据库建立
结合Visual Fox Pro8 建立三维数据库,应用Visual C++软件基于OpenGL 环境下在数据库中实现每个零件的三维模型及尺寸存储,供生成的模型进行匹配操作等操作。
2.3 路径规划设计
根据涂料流量、雾化气压、喷炬张角、喷涂距离等喷涂参数以及喷涂零件参数,计算机械臂前端的行程间距和喷涂速度完成在自由曲面上的路径设计。
需要将自由曲面进行离散,形成多个近平面、圆柱面、圆锥面和球面,对不同平面进行轨迹规划形成子行程,对各子行程完成路线链接,构成完整的喷涂轨迹。但因零件摆放位置和间隔划分空白区且喷涂区特有零件喷涂手法各异,对待相应零件特征部分(如键槽)喷涂的过程中造成的加减速度变化会造成喷涂过程曲率变化,影响镀膜厚度精度,需要后期轨迹优化。
2.4 喷涂性能仿真
仿真零件对近平面、规则曲面等子行程组合成自由曲面等复杂工件表面的总体行程,需要对喷涂性能及路径进行仿真。最终,通过OpenGL 技术实现3D 可视化显示喷涂轨迹图,曲面喷涂效果厚度色彩图、曲面喷涂效果厚度三维图、曲面涂厚度截面图等结果。
3 结语
现阶段,工业机械臂技术已相当成熟,图像识别、机械臂路径精度等技术在国内外很多地方有了应用,且反响良好。使用机械臂替代人工喷涂将极大地改善现阶段人工喷涂作业条件,提高生产效率。
