喷涂工业机器人的机械结构设计
2020-05-12徐会正
徐会正
(清研同创机器人(天津)有限公司,天津, 300300)
0 引言
目前,随着国内工业机器人需求量的日益剧增,喷涂工业机器人的发展也非常迅速,本文就喷涂工业机器人的机械结构设计进行阐述。
1 喷涂工业机器人机械结构设计
1.1 整体机械结构设计
从外观上看,机器人的电机需要全部内置,故将电机布置在一个密封腔内,使得机器人外表面更加圆滑,不会凹凸不平。密封腔有利于实现喷涂机器人的正压防爆功能,外表面圆滑可以方便机器人机衣(保护机器人本体,防止油漆将机器人本体过度污染)的穿戴。
大部分喷涂机器人本体都具有防爆功能,为实现该功能普遍采用正压系统防爆的方式,若想实现正压,就需要有密闭腔。具有防爆功能的机器人本体可以置于危险的工作环境中,而控制柜、正压系统柜等均需放置于安全区域内。通过正压系统,即将电机或具有本安特性的元器件安装于本体内的密封腔内,在该腔内填充一定压力的气体(一般为洁净空气),保证密封腔内的压力大于外界大气压,从而使外界危险气体(油雾等)不能进入,隔绝危险气体与电机等带电元器件的接触,即可实现防爆功能。同时还特别要求在开始启动机器人时,需要正压系统先进行吹扫,即将机器人本体密封腔内的气体全部换掉,保证机器人本体内元器件在上电前接触的气体也是安全的,该吹扫压力是正压压力的10倍左右,流量至少为该密封腔容积的5倍。
为保证安全,机器人还需要安装一些检测装置,如安全阀、压力传感器、流量计、调压阀等。其中,安全阀一般安装在机器人本体上密封腔的排气口处,在吹扫时多余的气体从该处排走,同时也避免气体压力突然增大可能造成的危险;压力传感器一般设置为2个,主要作用是检测密封腔内的气体压力,确保防爆功能的有效性,其中一个压力传感器设置的压力值高一些,在检测到密封腔内的压力低于该值时,机器人控制系统会提示报警,如报警灯或声音提示等,另一个传感器压力值设置为低压值,该值为保证防爆功能有效性的最低值,若该压力传感器检测到密封腔内的压力值低于该值时,机器人控制系统便会完全切断机器人本体内所有的元器件,使机器人立即停机;正压系统中的流量计可以检测吹扫时从机器人本体密封腔内排出的气体流量要大于该密封腔容积的5倍;调压阀一般设置为2个,一个为吹扫用的调压阀,另一个为正压调压阀(该阀一般为精密调压阀)。
机器人本体线缆的设计也非常重要,一般喷涂工业机器人为六轴串联结构,例如第一、第二、第三轴结构均采用中空C系列RV减速机,可以很好地实现线缆的走线设计,线缆可以直接从减速机的中间穿过,如图1所示[1];同时可以将第四、第五、第六轴电机均布置在第三轴关节处,即第三、第四、第五、第六轴的电机在一个腔体内,这样能很好地解决线缆的穿线设计。
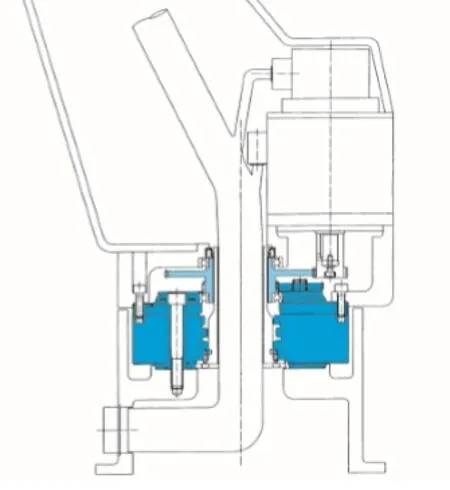
图1 采用C系列减速机的中空穿缆结构图
第一、第二、第三轴结构也可以采用E系列的非中空RV减速机,若采用该种类型的减速机,穿线有一定的困难,第一轴可以采用普遍的U形结构穿线方式,如图2所示。第二、第三轴需要做单独的走线通道或将第二、第三轴处线缆做外置处理,若采用外置穿线方式需要做线缆与本体间的密封,以保证机器人本体腔体的密封性。另外,机器人本体与控制柜间的线缆也需要做正压防爆处理,因为该部分线缆有一部分需要置于危险环境中。
图2 U形结构穿线
大多数的喷涂机器人手腕结构紧凑,其类型包括有中空手腕结构(3R),如图3所示;Lemma结构(BBR),如图4所示;叉臂结构(RBR)的手腕形式,如图5所示[2]。

图3 中空手腕(3R)
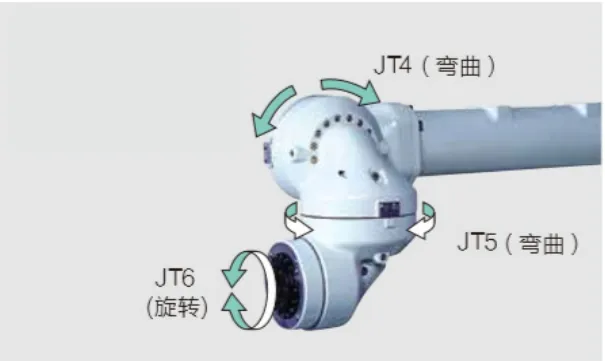
图4 Lemma手腕(BBR)
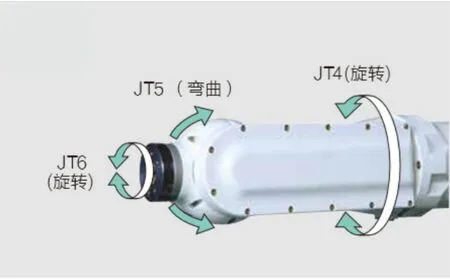
图5 叉臂手腕结构(RBR)
1.2 中空手腕结构(3R)
图6 所示为ABB IRB5500 中空手腕[3],图中的1、2、3为三个传动轴及传动轴上的齿轮,分别与第五、六、四轴的中空大齿轮啮合,从而实现第五、六、四轴的运动。
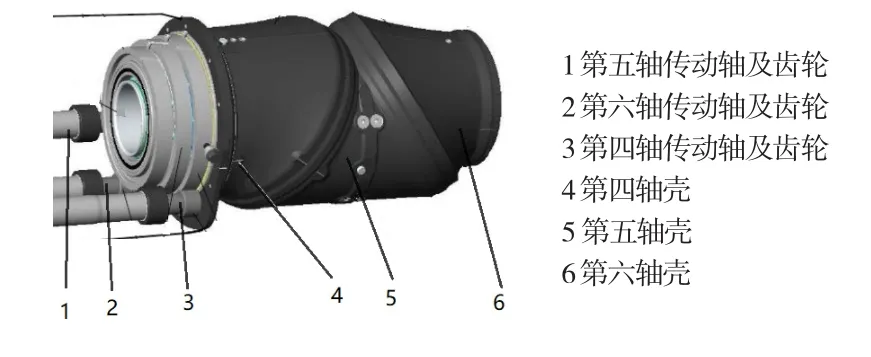
图6 ABB IRB5500中空手腕
该结构传动轴偏置,可以实现中间位置的中空,进而可以穿管走线,防止线缆或气管与外部部件的干涉;且手腕各轴可以实现360°旋转,非常灵活,该手腕3个轴能同时处在同一轴线上。
另外,还有一种比较常用的中空手腕结构是扬州科文机器人有限公司的中空手腕结构[4],具体传动结构如图7所示。该中空手腕的3个旋转轴轴线成一定角度,一般为120°或135°。

图7 扬州科文中空手腕结构图
图7中第六轴的传动路径为:当第六轴主动小齿轮转动时,会带动第六轴从动中空大齿轮转动,接着带动第六轴一级主动锥齿轮转动,再带动与之啮合的第六轴一级从动锥齿轮转动,继而带动安装在上面的第六轴二级主动锥齿轮转动,然后驱动第六轴输出法兰旋转,最终实现机器人第六轴的运动。
该手腕在设计时要注意润滑的密封设计,防止漏油与渗油。密封设计一般采用动密封与静密封相结合的设计方式,动密封一般采用旋转类油封,在安装油封时一定要特别注意,不能损伤油封的唇部,且需要在油封唇内涂抹一定量的润滑脂,来保证密封的可行性;静密封O型圈的材质一般选用材料性能好的,如氟橡胶。
目前,采用中空结构手腕的机器人品牌主要有杜尔涂装系统工程(上海)有限公司、ABB集团公司、川崎重工业株式会社(以下简称川崎)、安川电机(中国)有限公司、希美埃(芜湖)机器人技术有限公司(以下简称希美埃)等。
1.3 Lemma手腕结构(BBR)
Lemma手腕结构也是喷涂机器人常用的结构形式之一,即机器人的第四轴与第五轴是同时摆动,都可以实现360°的运动,第六轴是旋转运动,这样机器人手腕的活动范围更大,更加灵活。采用该手腕结构的机器人品牌主要有川崎、希美埃,如图8、图9所示。

图8 川崎Lemma手腕

图9 CMA Lemma手腕
Lemma手腕结构的传动原理如图10所示。采用该手腕结构三根传动轴一般为同轴布置,第四、第五、第六轴均可实现360°旋转运动,手腕灵活。除了传动结构的布置外,该手腕的主要难点在于锥齿轮的设计与机械加工。一般该类型的锥齿轮采购螺旋锥齿轮,因为其可以有效增加机器人末端的负载,并减少传动噪音。目前该类锥齿轮的专业齿轮制造商已有标准化产品,用户可以进行选择使用,该种锥齿轮除齿轮部位外,齿轮轴及其中心孔还可以进行追加工,这样可以降低成本。

图10 Lemma手腕结构传动简图
1.4 叉臂手腕结构(RBR)
该种结构的机器人手腕也是普通工业机器人常用的结构之一,该手腕第四、第五、第六轴电机的布置比较灵活,可以放置在第三轴关节处,也可以布置在手腕内或小臂中。
采用该种手腕结构的机器人品牌主要有ABB、希美埃(如图11所示)、川崎(如图12所示)等。

图 11 CMA GR6160

RBR传动原理有两种形式,其中,第五轴绕A旋转轴摆动,如图13所示;另一种,如图14所示,第五轴绕B旋转轴摆动。
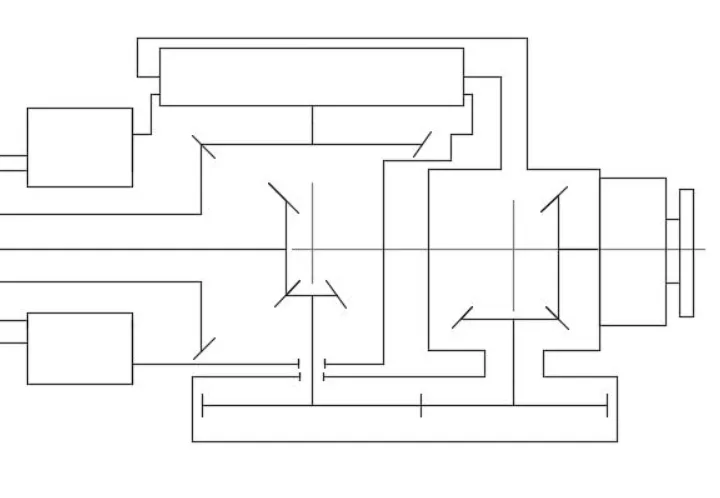
图13 叉臂手腕结构简图(绕A轴摆动)
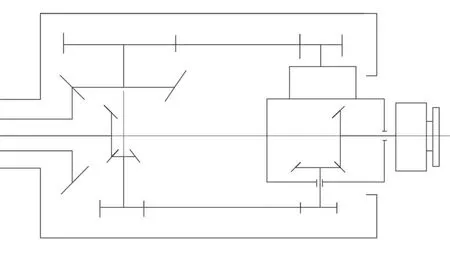
图14 叉臂手腕结构简图(绕B摆动)
2 结论
在设计喷涂工业机器人时,设计人员除了考虑其防爆功能外,尤其要考虑机器人的手腕结构,根据设计任务与末端安装工具(旋杯或喷枪等)来设计手腕,同时要考虑成本,C系列的中空RV减速机相对E系列贵一些,但走线相对简单些;也可以第一轴采用C系列的RV减速机,第二、三轴采用E系列RV减速机的组合设计方式,综合全面考虑才能设计出合理的喷涂机器人结构。
希望本文能给设计者提供一部分思路。
