面向光环境亮度测量的彩色成像系统光度定标方法
2020-05-12尚颖英朱川川谢蓄芬廖宁放邹念育
尚颖英,朱川川,谢蓄芬,,廖宁放,梁 静,邹念育
(1.大连工业大学信息科学与工程学院光子学研究院,辽宁 大连 116033;2.北京理工大学光电学院,光电成像技术与系统教育部重点实验室,北京 100081)
引言
照明环境涵盖的亮度范围较大,超出了成像系统的响应范围,成像时场景中过亮或过暗的场景不能同时成像,这导致了高动态范围场景亮度成像测量具有较大难度。系统动态范围延展广泛应用于光环境测量和评价,文献[1-8]中均应用高动态范围(HDR)图像进行光环境评价。另一方面,由于成像系统输出颜色空间具有设备依赖性,颜色空间的特性化可以将系统输出的三通道响应值转换为CIEXYZ,其中Y分量代表亮度。其经典算法包括查找表(LUT look up table)法、多项式法、神经网络法[9-11]。此外针对全色相机,文献[12-14]中提出亮度和图像灰度值的映射关系定标。在系统进行动态范围延展的基础上,标定高动态范围图像数字值与光环境场景的实际亮度映射关系是解决成像系统照明环境光度测量的关键。本文首先进行成像系统动态范围和场景亮度的匹配分析,提出了融合系统响应函数相对定标、系统响应线性化、高动态范围图像生成、颜色空间特性化、图像灰度值与光环境亮度映射关系定标的系统光度定标方法。然后实验验证方法的有效性。
1 成像系统与场景的动态范围匹配分析
实际场景的动态范围(DR,dynamic range)描述了场景所包含的亮度范围[15],可定义为
(1)
式中,lmax为最大亮度值,lmin为最小亮度值。成像系统的动态范围描述了系统响应的亮度范围,可定义为
(2)
式中,Dmax为系统输出的最大数字值,Dmin为系统输出的最小数字值。
理想条件下,当场景辐射通量Φe恒定时,曝光时间t越长,图像传感器接收到的辐射能量Qe越多;当曝光时间t恒定时,场景辐射通量Φe越多,则图像传感器接收的辐射能量Qe越多。成像系统响应函数与辐射能量、辐射通量和曝光时间的关系如图1所示。当场景辐射能量过大时图像传感器响应达到饱和,导致图像灰度值与图像传感器所接受的辐射能量值不能一一对应。图像传感器所接受的辐射通量Φe与图像灰度值Z之间的映射关系如式(3)所示[20]:
Φe(i,j)·t=f-1[Z(i,j)]
(3)
式中,Z(i,j)为像面坐标(i,j)位置的数字值,Φe(i,j)为像面坐标(i,j)的探测元所接收的辐通量,t为曝光时间,f为系统响应函数。
理论上曝光时间与图像传感器接收的辐射能量成正比,调整曝光时间可以改变系统对场景辐射通量的响应范围,为了匹配场景的辐射通量范围,系统应选择合适的曝光时间,但对于高动态范围场景,过亮或过暗的场景难以同时匹配,需要对系统的动态范围进行延展。

图1 成像系统响应函数非线性示意图Fig.1 Nonlinear diagram of imaging system response function
2 成像系统动态范围延展
成像系统响应函数是描述输入图像传感器的辐射能量与传感器输出数字值之间的映射关系。成像系统响应函数相对定标是标定场景输入能量与系统输出灰度值的相对关系。为了标定这一关系,通过改变系统的曝光时间而改变探测器输入的辐射能量,在不同辐射能量下获得系统输出的数字量值,进而求取输入输出之间映射关系。通过取对数剥离系统输出Gamma变换带来的非线性。则输入与输出的映射关系可用点对表达为
{Φe(i,j)·tN,ln[Z(i,j)]}=
{kN·ln[Z0(i,j)],ln[Z(i,j)]}
(4)
式中,N表示成像序号,Z0(i,j)代表某一曝光时间下的输出图像,kN·ln[Z0(i,j)]与Φe(i,j)·tN线性映射。则可以以点对{kN·ln[Z0(i,j)],ln[Z(i,j)]}为输入输出标定系统的响应关系。该响应函数的映射关系可表达为
Z(i,j)=F[k·Z0(i,j)]
(5)
式中,k代表积分时间变化带来的输入光能量变化的倍率,F代表相对系统响应函数,该响应函数表达了系统对输入辐射能量的响应关系。
2.1 系统输出线性化
为了使输出与输入辐射成线性关系,对多积分时间获得的数字图像进行线性化,即去除相对响应函数。对三通道响应值分别进行线性化公式为

(6)

2.2 高动态范围图像生成
由于场景的辐射通量不变,则图像(i,j)像元对应的三通道响应值进行融合,则高动态范围图像的三通道响应值为

(7)
式中,tj代表第j次成像的曝光时间。
3 成像系统颜色空间特性化及亮度定标
由于成像系统中探测器的光谱响应与CIEXYZ标准色度系统中的颜色匹配函数不同,需要进行相机颜色空间特性化[16],如式(8)所示。

(8)
L=G[Y]
(9)
式中,G是Y刺激值与亮度L的映射关系。
4 实验验证
4.1 成像系统光度定标方案
成像系统的光度定标方案如图2所示。
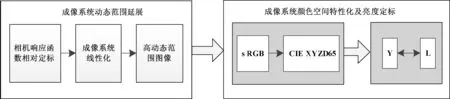
图2 成像系统光度定标方案Fig.2 Luminance calibration method for imaging system
4.2 实验装置
使用图3所示的实验装置,分光辐射亮度计cs2000以及CannonEOS600D成像系统。首先使用CanonEOS600D型成像系统对具有动态范围明显很大的场景进行拍摄,设置光圈数F/4.5,设置曝光时间为1/1250 s、1/800 s、1/400 s、1/320、1/125 s、1/60 s、1/40 s、1/30 s、1/20 s、1/10 s、1/5 s、1 s,对同一场景在各个曝光时间下分别拍摄一张图像,可得12张低动态范围图像并存储为RAW格式,所得的低动态范围图像序列如图4所示。根据2.1节所提的方法确定成像系统红、绿、蓝三通道的响应函数曲线如图5所示。

图3 实验装置Fig.3 Experimental facility

图4 多曝光时间下低动态范围图像Fig.4 Low dynamic range image with multiple exposure times
4.3 实验结果
1)系统动态范围延展。成像系统输出灰度与相对输入辐射能量值之间的函数关系如图5所示;合成高动态范围图像,如图6所示。
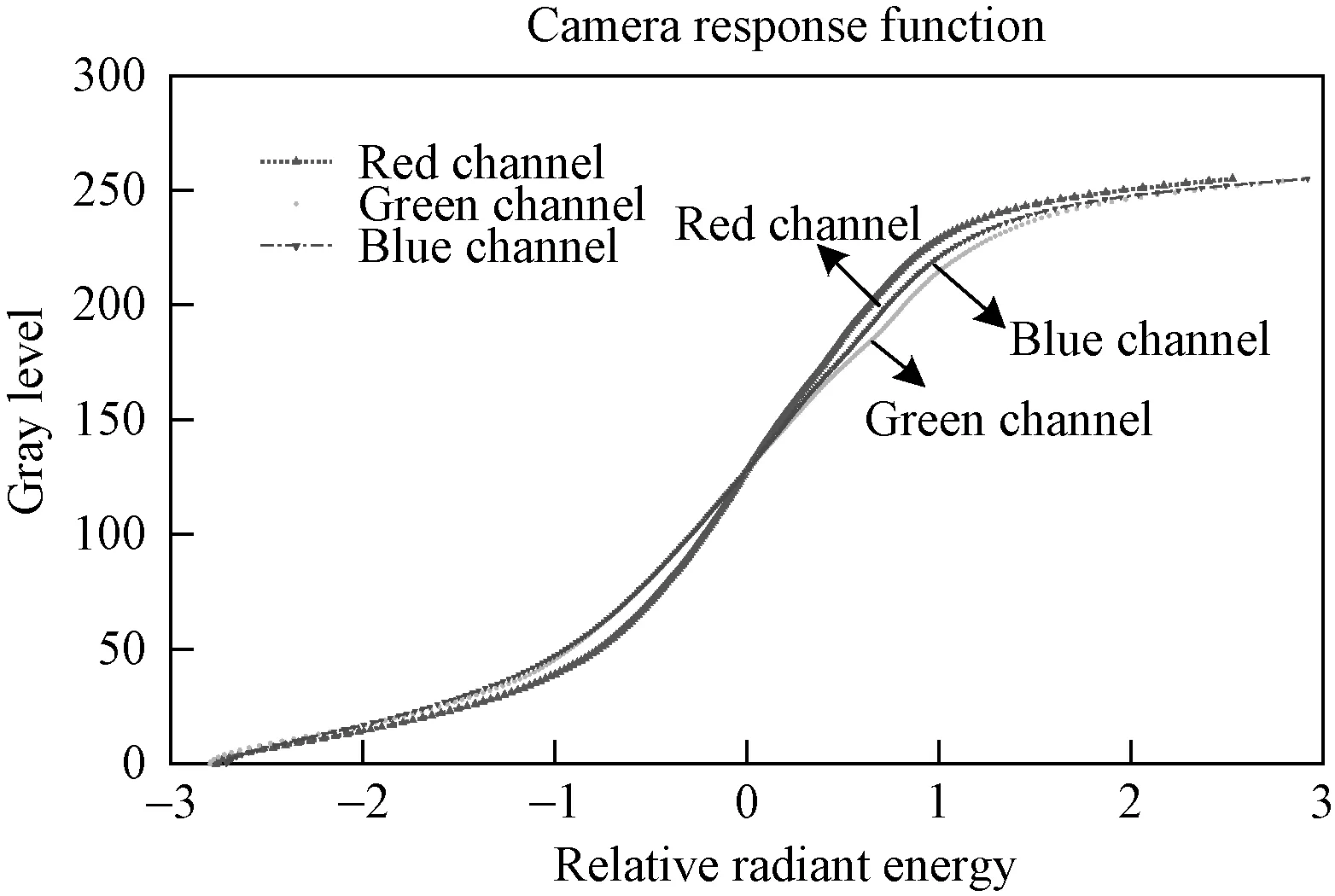
图5 系统三通道相对响应函数曲线Fig.5 System three-channel relative response function curve

图6 合成的高动态范围图像Fig.6 Composited high dynamic range image
2)光亮度定标。颜色空间特性化后Y分量如图7所示,上面的黑色标记为对应的定标点对位置。使用亮度计测量图7标记点实际亮度获取数据点对,用多项式拟合结果如图8所示,该曲线的拟合优度为0.8931。

图7 特性化后的图像及测量点位置Fig.7 Image after characterization and the position of the measuring point
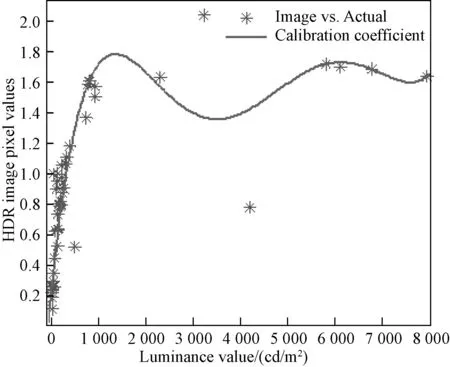
图8 拟合后的定标系数曲线Fig.8 The fitted calibration coefficient curve
定标曲线如式(10)所示。
G(x)=p1·x5+p2·x4+p3·x3+p4·x2+p5·x+p6
(10)
其中p1=1.54×104;p2=-1.35×105;p3=3.81×105;p4=-3.26×105;p5=-4.77×104;p6=1.23×105。
从图8中可知,该定标曲线只适用于实际场景亮度小于1 000 cd/m3,当实际场景亮度大于该值会有较大误差出现。
4.4 亮度测量及评价
将从高动态范围图像中得到的亮度L与用亮度计测得的亮度进行比较,如式(11)所示:

(11)
式中,L_r表示应用亮度计测得的亮度,L表示本文方法获得的亮度。
选取图9所示的图片投影到幕布上,对60个点分别使用两种方法进行测量,二者测量结果的比较如图10所示。可见,本文方法误差小于1.8%。

图9 选取图片及测量点的位置Fig.9 Select the picture and the location of the measurement point

图10 高动态范围图像亮度与亮度计测量亮度的误差Fig.10 Error with HDR image luminance and luminance meter
5 结论
本文提出了面向照明环境亮度测量的成像系统光亮度定标方法,给出了定标模型,拟合优度达到0.8931。对方法进行了实验验证,结果表明在动态范围内定标方法测量误差小于1.8%。本文提出的定标方法可用于高动态范围场景高密度亮度测量。
