基于移动三维激光扫描的地铁隧道结构监测方法
2020-05-12杜荣武曾铁梅陈世杰温凯伦吴贤国
杜荣武, 翁 顺, 曾铁梅, 陈世杰, 温凯伦, 吴贤国
(1. 华中科技大学 土木工程与力学学院, 湖北 武汉 430074;2. 武汉地铁集团有限公司, 湖北 武汉 430030)
城市轨道交通的高速发展在为我国的交通事业带来巨大的经济效益的同时,也带来了安全隐患。由于地质条件、列车运营、地铁隧道结构自身负荷、施工水平等因素,轨道交通地下结构在全寿命运营周期内将会发生沉降、变形、裂缝等病害。这些病害不仅会影响城市轨道地下交通作为快速安全通道的使用功能,而且若不能及时被发现、并采取相应的维修措施,将有可能导致隧道主体结构失稳、严重开裂甚至坍塌等重大事故,最终威胁公众的生命财产安全。提前获知隧道隐患可通过结构健康监测技术来实现。结构健康监测技术通过利用现场的、无损的、实时的方式采集环境与结构信息,分析结构反应的各种特征,获取结构因环境因素、损伤或退化而造成的改变[1]。如王军等[2]对南京长江隧道进行了施工阶段的监测,使用土压力计、温度计、位移计、应变计等实时在线监测隧道的工作状态,并建立了预警报警系统。陈卫忠等[3]在南京扬子江隧道建立了以光纤光栅式传感器为主的结构健康监测系统,采用混凝土压变计、钢筋计、渗压计、土压计和温度计等监测土水压力、结构内力、结构变形等,实现隧道结构安全状态的实时在线监测,并依此开发了预警和评价模块。
目前,这种通过特征点变形来评估地铁隧道健康状况的监测模式在地铁隧道的变形监测中应用广泛,但是这种模式也存在两方面缺点[4,5]:(1)地铁为超长线状结构,单线长达二三十公里,线网长达上千公里,若需监测地铁隧道全范围内的变形状况,且不遗漏能够反映地铁隧道变形的重要信息,需要布设大量的传感器,耗费大量的财力物力;(2)地铁隧道内管线分布密集,可利用空间狭小,这导致监测传感器、数据采集仪等硬件设施布局安装困难。除此之外,由于固定装置的老化、列车的扰动等原因,设备在长期的使用过程中会发生脱落,这给地铁的运营带来新的安全隐患。
因此,综合考虑地铁隧道超长线状特征和变形特点,对地铁隧道的监测应该从获取有限监测点数据的点监测模式扩展至能够表征隧道整体变形的三维全景监测模式。监测仪器也应该从需要进行前期安装的接触式向无需进行监测点布设的非接触式发展。三维激光扫描技术的出现,为这种手段的实现提供了可能。三维激光扫描技术又被称之为实景复制技术,它以激光测距的方式快速获取大量三维坐标形成点云数据,通过对点云数据的还原分析处理,得到被扫描物体的高精度模型[6]。目前,三维激光扫描技术在室内设计、建筑监测、交通事故处理、灾害评估、船舶设计、数字城市、军事分析等领域均得到广泛应用。随着三维扫描技术的智能化发展,三维激光扫描技术也开始应用在隧道监测中。候海民[7]以青岛胶州湾海底隧道为工程实例,将三维激光扫描技术运用于隧道工程安全监测中,通过对开挖过程中隧道开挖面的三维点云数据进行提取和分析处理,有效地解决了隧道大断面开挖的安全监控问题。谢雄耀等[8]采用三维激光扫描技术测量隧道全断面变形,通过几何分析方法对测站间距、扫描分辨率和标靶进行优化,并沿隧道轴线方向依次布设多个测站完成对整条隧道的扫描。康志忠等[9]使用三维激光扫描技术对隧道结构进行收敛变形监测,基于最小二乘的椭圆拟合算法对隧道轮廓进行椭圆拟合,将拟合后的椭圆与隧道初始设计半径进行对比,从而得到结构的收敛变形情况。
地铁为超长线状结构,上述固定式的三维扫描技术若需扫描全段隧道,则存在扫描仪搬运困难、采集站点更换频繁等问题。针对固定式三维扫描的缺点,本文建立了地铁隧道移动三维激光扫描系统,监测武汉地铁三号线王家湾—宗关跨江段,获取了地铁沿长度方向的三维扫描点云数据。然后,通过对隧道点云数据的分析处理,本文得到了隧道结构变形、收敛、错台和轨道变形。分析结果表明三维激光扫描技术能有效监测地铁隧道结构变化,避免了点式布置大量传感器及固定搬站导致的工作量的增加和测量精度的降低。
1 移动式三维扫描监测
1.1 监测对象
本文以武汉地铁三号线王家湾—宗关段区间跨江段为监测对象,监测区间选取该段右线里程YDK11+157—YDK11+369。由于该段为跨江段,同时覆盖暗挖段—空推段、空推段—盾构段两处交界面,成孔工法覆盖全,在运营期内隧道病害相对突出。因此,对该段进行监测具有特殊的工程意义。
1.2 监测采集系统
监测采集系统采用徕卡SiTrack:One型移动轨道扫描系统,如图1所示。徕卡SiTrack:One移动轨道扫描系统集成了GNSSIMU系统、激光DMI里程计、三维激光扫描仪、激光轨道断面仪等多种传感器,可用于轨道检测、线路维护、竣工分析、限界测量等多个领域。徕卡SiTrack:One移动轨道扫描系统可提供快速连续的扫描采集过程,最高连续测量速度可达6.4 m/s,扫描范围能全面覆盖轨道、标靶及周边环境。高解析度的轨道断面仪可获取0.03 mm分辨率的轨道表面信息,即使在隧道扫描过程中完全失去GNSS信号,也能高精度持续获取定位信息。

图1 徕卡SiTrack:One型移动轨道扫描系统
1.3 扫描监测和数据配准
利用徕卡SiTrack:One移动轨道扫描系统的优点,可高效率、高精度地获取隧道点云数据,扫描监测的主要步骤如图2所示。先选取合适的位置作为起止点及基准点,并在监测路线上沿途均匀布设控制点,在起止点、基准点和沿途控制点处安装好靶球,用全站仪测量靶球的点位坐标,然后对扫描仪进行初始化校验,并以匀速扫描隧道的管片和轨道获取点云数据,最后对点云数据坐标进行配准归并。

图2 移动轨道扫描系统监测流程
1.3.1 起止点及基准点选取
选择隧道风井偏右YDK11+157处为扫描起点,YDK11+369处为扫描终点。在扫描的起止点位置均标记四个控制点,控制点两两分布在隧道中线两端,同侧的控制点前后间距为1.5 m左右。由于监测区间内每隔60 m便在线路两侧成对留有供地铁轨道施工时使用的CP-Ⅲ控制点,所以将这些CP-Ⅲ控制点作为激光扫描的基准点,如图3所示。扫描区间内有全自动全站仪监测点,用于测量控制点在地铁隧道坐标系下的绝对坐标,然后将点云坐标与地铁隧道坐标系归并统一。
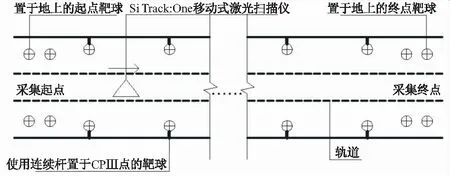
图3 起止点和基准点靶球布置示意
1.3.2 靶球安置及坐标测量
因隧道中无GNSS信号,除了在起止点和基准点位置安装靶球外,仍需沿途均匀布设每20 m一个的控制点,在控制点上安装靶球,然后使用棱镜与全站仪测量出每个靶球的点位坐标。靶球实物图如图4所示。

图4 基准点靶球布设
1.3.3 扫描仪检校初始化
将组装好的扫描设备放置在轨道上,推至起点处两排靶球的中间位置,保证四个靶球在扫描仪初始检校时能够同时被扫描到,如图5所示。然后初始化扫描软件,扫描软件会根据扫描车上的四个靶球和轨道两侧的四个靶球进行自检校。再以3.6 km/h匀速推动扫描车运行小段距离,来检查仪器设备的运行状况。
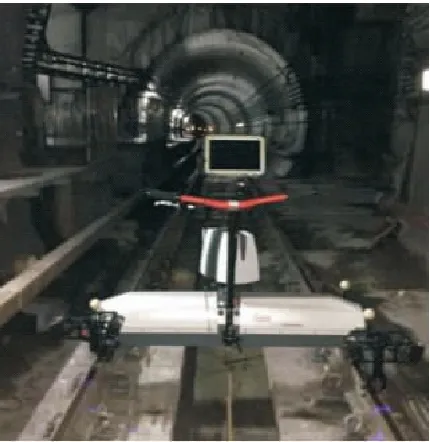
图5 激光扫描仪实物照片
1.3.4 扫描监测
手推SiTrack轨道扫描车以正常行走速度(3.6 km/h)前行,连续不断地推至终点。扫描车移动过程中,徕卡P40三维激光扫描仪能够连续自动扫描,获取360°范围内隧道三维点云数据,系统内部的IMU惯性导航系统及DMI里程计则提供点云数据的精确定位。本文为了获取更密集的点云数据,采取低于正常值的行走速度。采集全段数据共用时约8 min,速度约为1.6 km/h。设备推至终点之后再根据终点处的四个靶球对扫描仪进行一次自检校。
1.3.5 扫描数据配置
扫描原始数据由SiTrack移动轨道扫描系统配套专业软件进行转换,自动解算自检校数据,确定所有扫描点相对位置关系,再根据全站仪测量的靶球坐标对扫描仪扫描的靶球点云坐标进行修正,从而生成具有实际位置坐标的点云数据。生成的点云数据如图6所示。
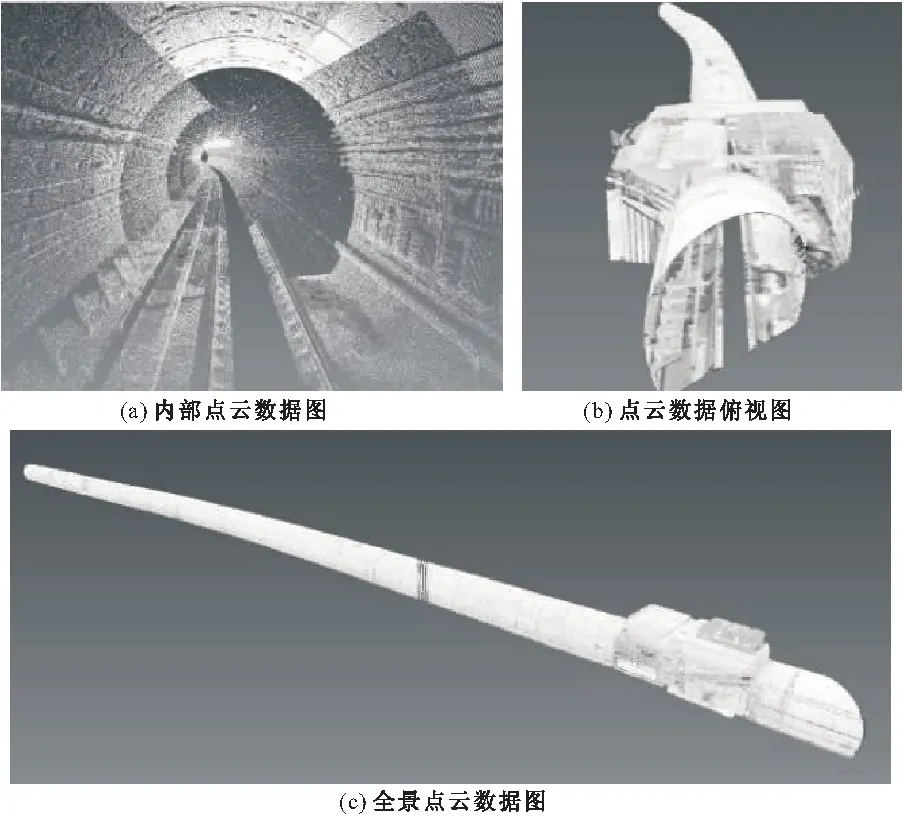
图6 地铁隧道三维激光扫描点云图
2 点云数据的处理和分析
2.1 点云数据的切片、降噪和拟合
为了掌握地铁隧道中每一环盾构管片的变形情况,根据扫描仪生成的隧道中心轨迹线对点云进行切片处理,切片所在平面垂直于隧道中心轨迹线。由于里程YDK11+157—YDK11+369的点云坐标是根据全站仪测量数据配置的,因此在切片过程中,切片所在平面与隧道中心轨迹线交点坐标即为切片所在里程位置,本文所截取的切片里程位置坐标区间为901.24~1113 m。
沿隧道走线方向在每环管片的中间位置截取扫描的点云断面。由于扫描得到的原始点云数据中包含了管线、电机设备、消防管道等若干对于成果处理无效甚至会产生不良影响的点,所以在分析点云数据之前,根据分析需求将有效的点保留,将无效的点删除,对截取的断面进行去噪处理。其中,噪音数据主要是道床、轨道、电缆、照明设备和其他附着在管壁上的设施。最终保留反映隧道管片的点,如图7所示。

图7 横向断面切片
由于断面的切片数据是一组离散的点,这些离散的点只具有其坐标信息,仅依据离散的点云坐标无法准确地获取断面的收敛变形情况。因此,在对地铁隧道断面进行收敛变形分析时,需要根据离散的断面点云坐标拟合出连续的断面曲线。工程实际中,由于隧道断面受到不均匀荷载的作用,使得管片发生不均匀变形,形成近似椭圆的形状[10]。
因此,将去噪后的断面切片点云进行椭圆拟合。设管片断面曲线的一般方程为椭圆曲线方程[6],即
Ax2+Bxy+Cy2+Dx+Ey+F=0
将曲线方程的参数A,B,C,D,E,F初设为一个参数矩阵P0=[A0B0C0D0E0F0],将断面切片点云坐标代入参数方程运用最小二乘法进行拟合[11,12],图8为断面拟合曲线。
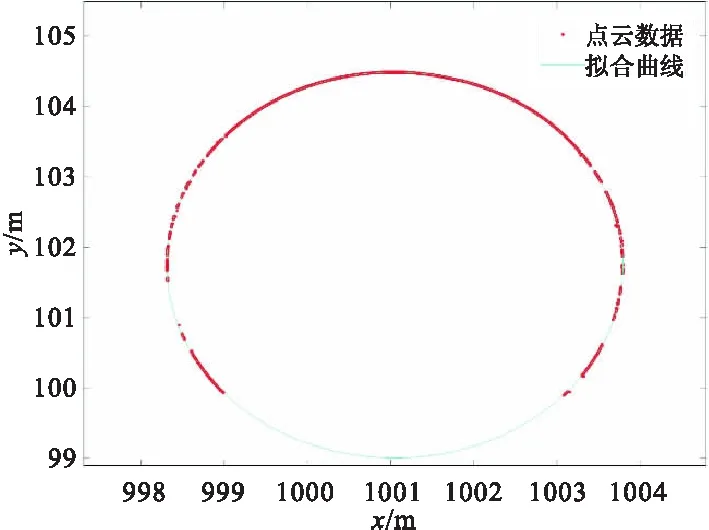
图8 断面拟合曲线
2.2 隧道断面变形
将拟合后的隧道断面上的每个点到椭圆中心的距离与初始设计半径相比较,计算差值后可获得图9所示的监测区间各环管片变形后的半径与设计半径差值的变化曲线,将其中一环管片的变化曲线单独画出,如图10所示。由图10可知,隧道断面除了在竖向方向被压扁,在横向方向还会向外扩张。隧道断面的变形差值分别在顶部与两腰达到峰值,变形形状基本呈现出两侧向外扩大,上下收敛缩小的规律,整个隧道断面形成一个扁平的椭圆。
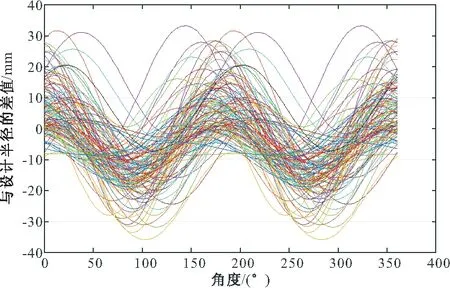
图9 各环管片的变形后半径与设计半径的差值曲线
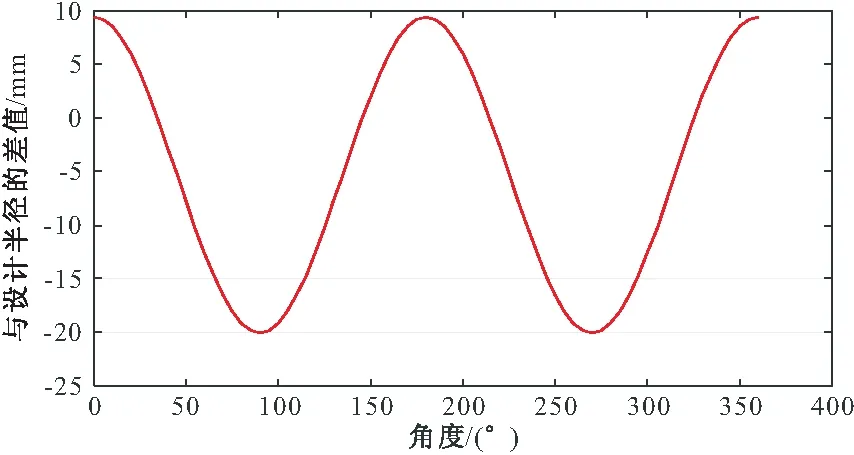
图10 某环管片变形后半径与设计半径的差值曲线
图11所示为监测区间内各断面的最大变形值,由图可以看出,监测里程内各环管片的直径变化值基本在20~50 mm之间,其中里程为1095 m处的管片直径变化值最大,达到71.89 mm。
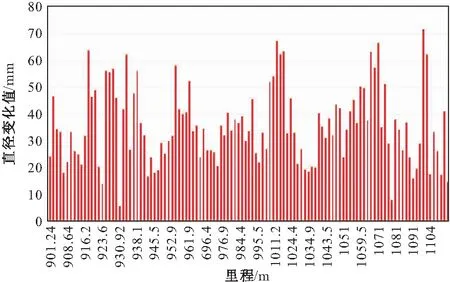
图11 监测区间内各断面最大变形值
本文监测区间的管片错缝拼装,根据《城市轨道交通隧道结构养护技术规范》中对运营隧道错缝拼装管片的要求,其断面变形的直径变化率控制值为10‰。将图12所示的监测区间各断面直径最大变化率曲线值与规范值进行对比。
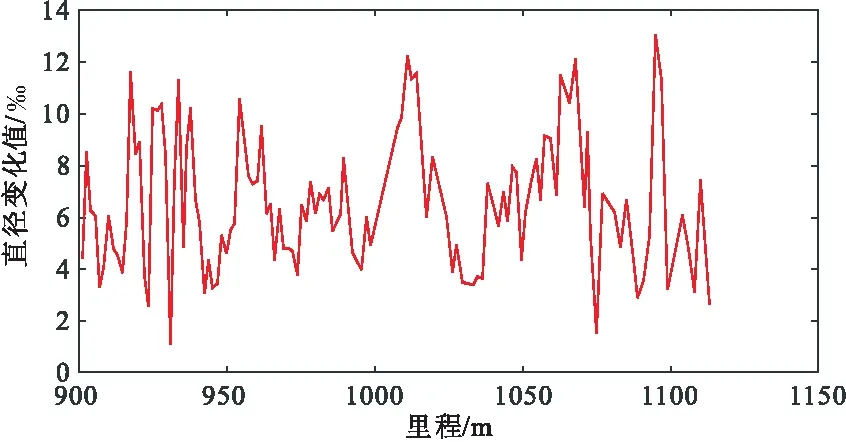
图12 监测区间内各断面直径变化率曲线
根据拟合的椭圆曲线计算每个断面的最大直径变化率,即直径变化最大值与设计直径的比值。在监测区间内的所有环管片断面中,有15环管片的直径变化率超过10‰,占总数的12.9%,其中里程为1095 m处的直径变化率最大,为13.1‰。
表1列出了监测区间内直径变化率超过规范控制值的管片变形情况。可以看出,在直径变化率超过规范值的15环管片中,其与规范的差值在0.1‰~3‰之间,略超出规范控制值,但是其直径变化率基本在规范要求的控制值附近。
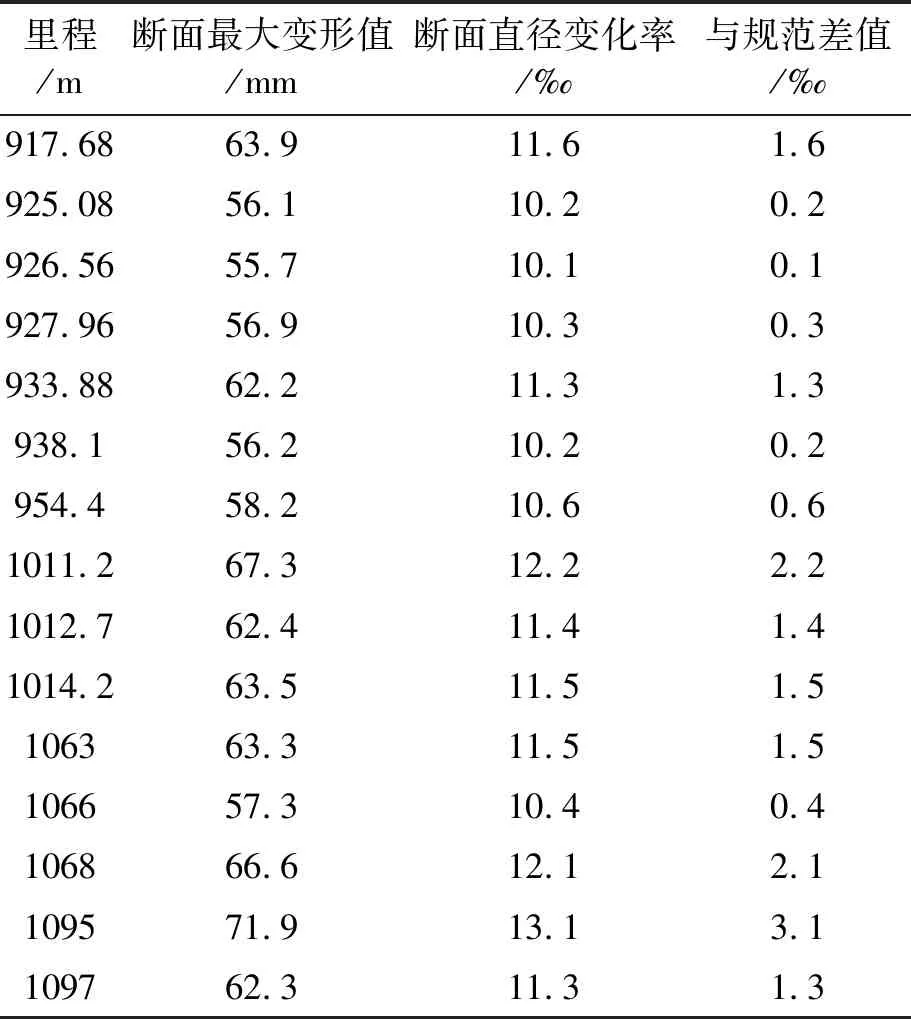
表1 直径变化率和断面变形监测结果
2.3 隧道净空收敛
根据断面拟合椭圆,计算椭圆的短半轴长度与隧道设计半径的差值,即为隧道断面的最大净空收敛值。收敛值随里程的变化曲线如图13所示。隧道的净空收敛值基本在10~30 mm之间,其中里程为1095 m处的管片收敛值最大,达到35.94 mm。在监测区段内,净空收敛值在10 mm以下管片占总数的22.6%,收敛值在10~20 mm之间的管片占总数的51.34%,收敛值在20~30 mm之间的管片占总数的20.86%,收敛值超过30 mm的管片占总数的5.2%。

图13 净空收敛变化曲线
然后计算每个隧道断面的最大净空收敛值所在位置偏转角。如图14所示,拟合椭圆短轴与设计隧道竖向半径的夹角β(顺时针转动为负,逆时针转动为正)即为隧道净空收敛最大值所在位置偏转角。计算后形成如图15所示的曲线。由图15可以看出,管片的净空收敛最大值所在断面的径向位置一般出现在顶部偏左或偏右的位置,其到断面中心的连线与竖直方向的夹角β最大为44.14°,位于里程断面916.2 m处,其余大部分分布在-30°~30°之间。
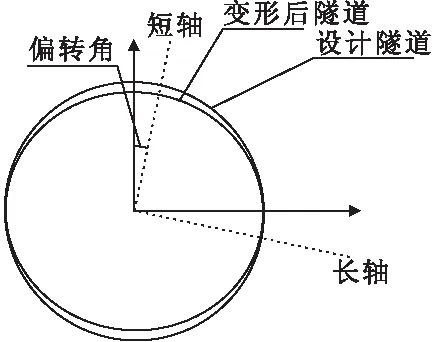
图14 隧道断面收敛最大处偏转角示意
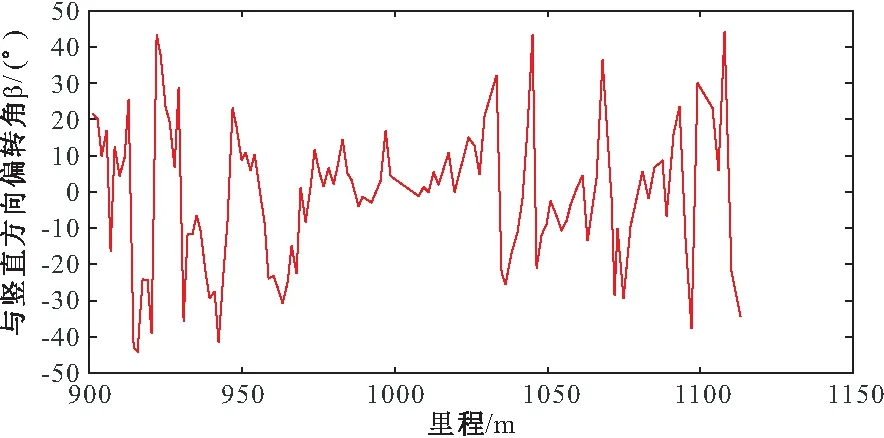
图15 收敛最大处到断面中心连线与竖直方向偏转角曲线
2.4 隧道管片错台
将隧道点云数据纵向切片,量取管片与管片之间的错台情况,图16所示为监测区间内管片错台值1 mm以上的错台情况。在监测区间的所有环管片中,错台值基本在10 mm以下,错台值在10 mm以上的占总数的18.4%;其中错台值在10~15 mm之间的共有14环管片,占总数的12%;错台值在15~20 mm之间及超过20 mm的各有1环管片。
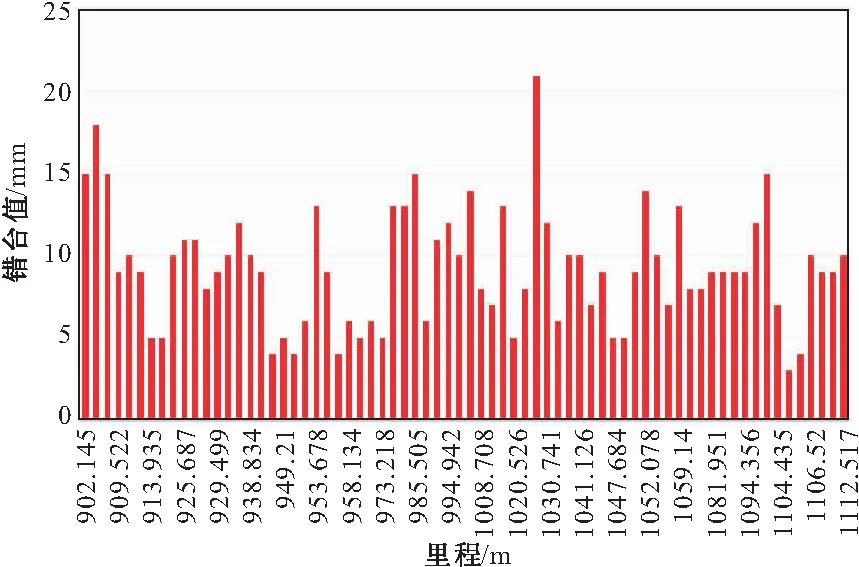
图16 监测区间内管片间错台值
根据《城市轨道交通隧道结构养护技术规范》对管片错台的要求,其错台控制值为20 mm。监测区间内仅有里程为1027.353 m处的管片错台量超过规范要求,为21 mm。总体来看,该区间的隧道管片间错台较小。
2.5 轨道变形
徕卡SiTrack:One激光扫描仪两侧安装的高分辨率轨道扫描装置可以单独对两侧轨道进行高分辨率扫描,从扫描得到的点云数据中提取轨道轨迹线,如图17所示。
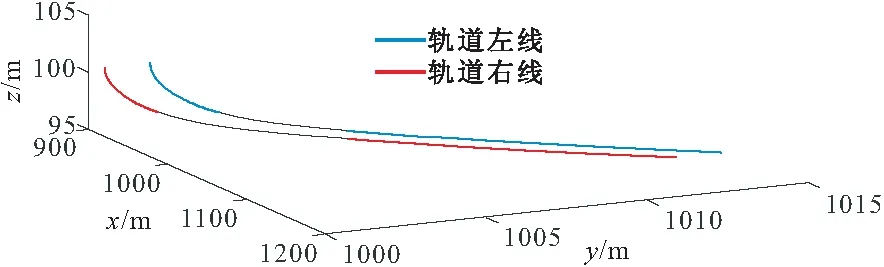
图17 轨道轨迹线
《地铁设计规范》中规定地铁的标准轨距为1435 mm,根据提取出的轨迹线计算实际轨距,并与标准轨距进行对比,可得到轨距差值曲线,如图18所示。
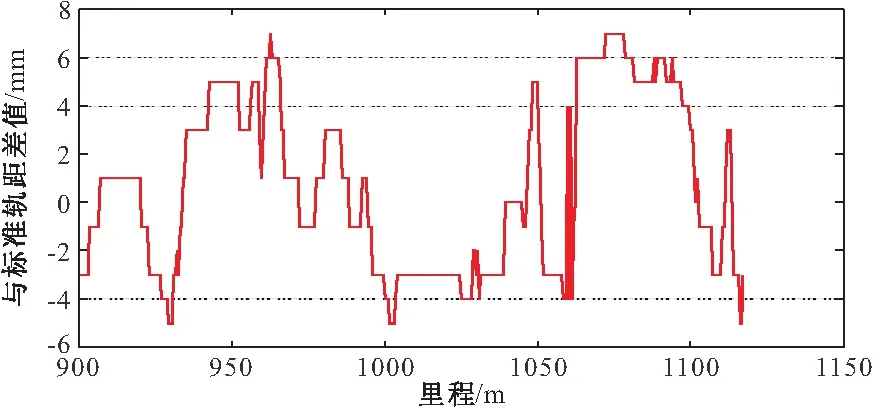
图18 与标准轨距差值曲线
根据《城市轨道交通结构安全保护技术规范》对轨距的要求,实际规矩与标准轨距的差值应在-4~+6 mm之间。由图18可知,监测区间内的轨道轨距基本在规范的控制值之内,其中里程为928.699~930.317,1001.021~1003.520,1115.990~1116.484 m范围内轨距差值最小为-5 mm,里程为962.001~962.997,1072.237~1078.697 m范围内轨距的差值最大为7 mm,均只超出规范要求1 mm。
3 结 论
(1)本文采用移动三维激光扫描技术对地铁隧道进行了三维全景监测,得到了监测区段的三维点云数据。使用切片、降噪、拟合等方法对移动监测数据进行了分析处理。通过点云数据获取地铁隧道的三维全景影像,把监测工作从“点”和“线”突破到了空间和全景,克服了传感器监测控制网布设维护复杂、传感器需求量大等缺点。
(2)通过对移动三维激光扫描得到的隧道断面点云数据进行最小二乘拟合,得到了断面的整体变形,其变形基本呈现出两侧向外扩大,上下收敛缩小的规律,整个隧道断面呈现一个扁平的椭圆形状。其次,隧道断面相较于其初始设计半径值发生了较大的变形,但总体仍处于稳定状态。管片错台、轨道变形基本满足规范控制值要求。
(3)移动三维激光扫描技术是一种高效、精确的健康监测方法,但是在应用于地铁隧道监测过程中,只能在非运营时段进行扫描,无法实时获取三维点云数据,而且所测量的数据无法通过无线传输方式实时传输至外部分析平台。因此,如何真正实现软件平台对移动三维激光扫描仪器的远端无线控制,并使其进行数据自采集、自传输,这是下一步需要解决的问题。
