建筑抹灰作业工人上肢姿势不舒适度评价模型
2020-05-12余群舟郑智鹏郭林飞孟文辉
余群舟, 郑智鹏, 郭林飞, 孟文辉
(华中科技大学 土木工程与力学学院, 湖北 武汉 430074)
目前我国建筑行业存在着明显的“重安全、轻健康”的现象,即生产过程中更多重视的是工人的安全状态,而较少重视工人的健康状态。如赵挺生[1]、林世飏[2]、徐雷[3]等对安全管理、教育及立法方面进行了研究;樊哲[4]、李兵兵[5]等对建筑安全生产的标准化进行了研究;李钰[6]、郭红领[7]等研究了现代化技术在建筑安全管理中的运用等等。实际上流行病学研究发现,不合理的作业姿势、重复性操作很可能会诱发职业性肌肉骨骼疾患(Work-related Musculoskeletal Disorders, WMSDs)[8~11]。建筑施工作业的环境特殊性和劳动强度大等特点,使建筑工人群体当中,出现职业性肌肉骨骼疾患的频次也较多,建筑工人平均缺勤率也较其它工种高[12]。
在建筑工人健康方面,杨德钦进行了施工工效学的理论性研究[13],刘军进行了钢筋下料作业功效优化研究[14];Ray[15]对工人姿势进行实时分析并提出了一种基于人机工程学的建筑工人姿态分类与实时监测系统; Roja[16]对建筑施工中的人机工程学进行了风险分析,Kulkarni[17]采用快速评估对建筑工人的姿势进行了分析等等,大部分研究存在一定的局限性,或是过于理论化,或是未结合现场实际操作。故为对建筑业工人机体的生理状态(如舒适性、疲劳、损伤等)能够做到早期判断和干预,本文以建筑抹灰作业为对象,针对工人抹灰作业过程中较为简单且典型的上肢姿势进行研究,通过对作业姿势定义及现场调研,分析上肢不舒适度影响因素,然后,基于CATIA(Computer Aided Three-dimensional Interactive Application)软件模拟上肢在一定抹灰负荷下的关节力矩(肌肉负荷),构建不舒适度预测模型,为快速评价上肢不舒适性提供量化参考。
1 抹灰工人上肢姿势分析与模拟
1.1 上肢作业姿势
在研究抹灰作业工人上肢姿势时,以身体躯干为平台(不考虑人体躯干的状态),则上肢的肩、上臂、肘、前臂、腕和手部几个部分通过相连的关节相互之间形成一定范围内的角度,这些角度与各个部分的组合便构成了一个个不同的上肢作业姿势。如图1表示的是工人在进行天棚抹灰时右上肢的某个特定的姿势,图中γ,α,β等表示的是上肢的腕关节、肩关节、肘关节等的关节角,这几个关节角与上肢的手部、前臂和上臂就组合成了抹灰作业时上肢的一个作业姿势。
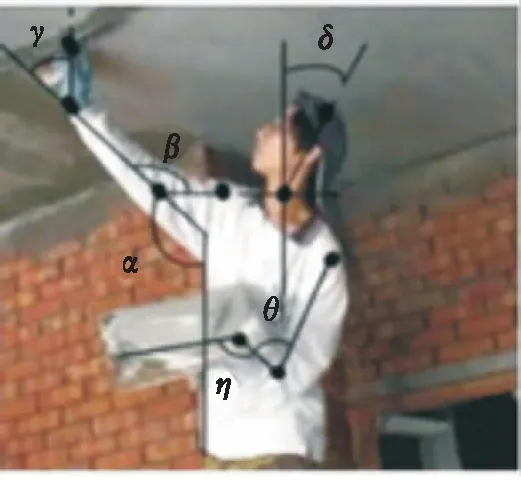
图1 抹灰工人姿势示意
1.2 工人抹灰作业现场调查
(1)调查目的
利用CATIA软件的人机工程学设计与分析模块来进行上肢关节负荷仿真实验,借助抹灰工人在不同关节角度下的关节负荷来分析上肢作业姿势的舒适性时,需要确定上肢各个关节角度变化范围及抹灰时手部基本负荷。为此,我们进行现场调研,主要目的为:1)确定上肢各个关节角度变化范围;2)抹灰作业手部基本负荷;3)通过调查有经验的工人,定性判断较为舒适的上肢作业姿势。
(2)调查开展
使用相机现场拍照、录像记录抹灰工人的作业过程,通过对工人现场询问,了解工作时关节角度变化的大致范围及抹灰时一般负荷。从视频中截取工人抹灰作业典型的作业姿势示意图,如表1所示。
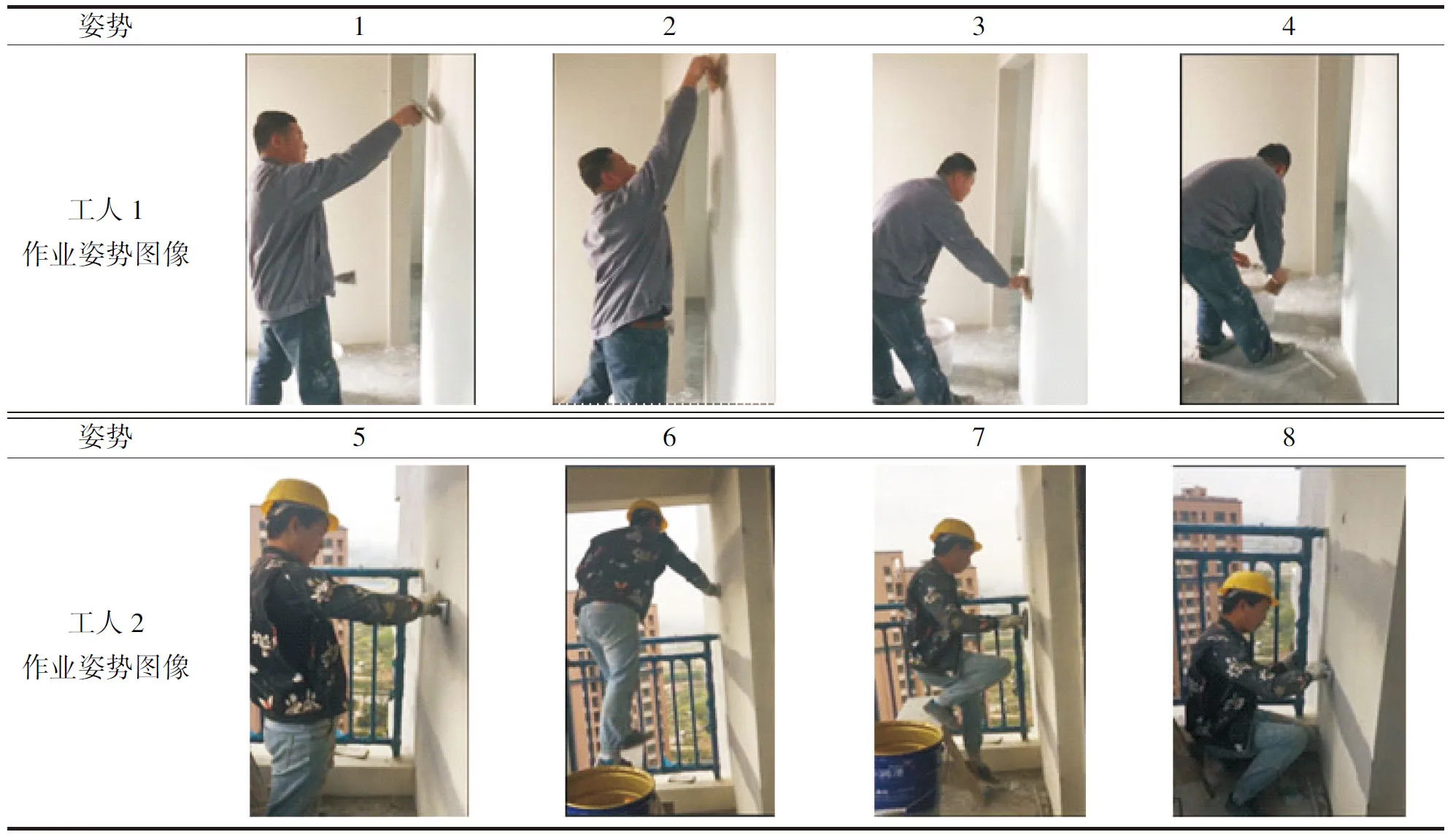
表1 抹灰工人的作业上肢姿势图示
1.3 模拟参数确定
由于大部分人惯用右手进行作业,故以右手的抹灰作业姿势为例进行分析。选取人体右上肢的肩关节、肘关节和腕关节及5个姿势关节动作利用CATIA进行实验,结合现场调研,考虑抹灰负荷2 kg的前提下,确定各关节动作变化、姿势角度变化范围如表2所示,各关节动作姿势变化过程如图2所示。
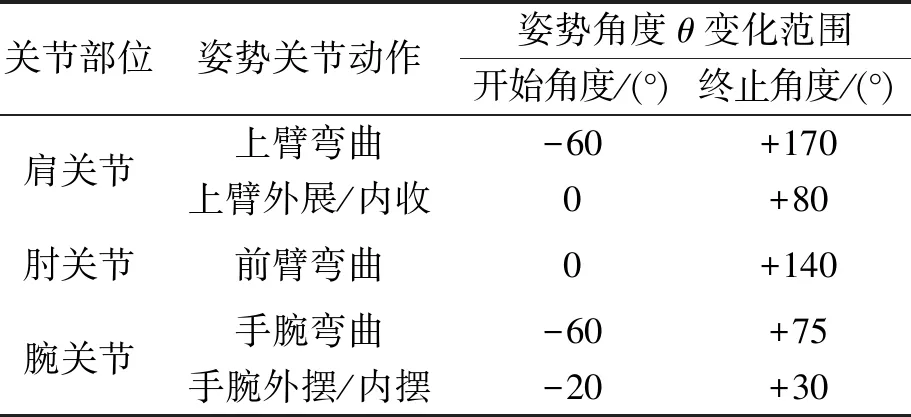
表2 实验中测试的关节部位、姿势关节动作、姿势角度变化范围
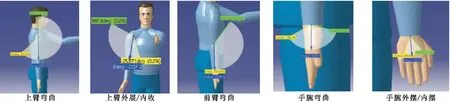
图2 关节动作变化过程
又因在使用不同百分位数的成年男子人体模型来模拟关节负荷时,尽管人体模型具有不同的身体、重量和肢体长度,抹灰负荷也在变化,但在完成每个姿势的模拟过程中,CATIA给出的关节负荷变化数据和规律均基本相似;同样,其人体姿势不舒适度的变化规律也基本相似[13],因此,采用第50百分位的中国成年男子人体数据进行所有关节动作的实验。
为了满足作业需要,抹灰过程中工人上肢需要频繁交替变换静态姿势和动态姿势,作业姿势组成复杂,且与静态姿势相比动态姿势不易捕捉。因此,本文主要研究单一角度变化下的抹灰工人静态姿势的不舒适度,当不考虑时间因素时,静态姿势的不舒适度变为瞬态姿势的不舒适度[13]。
1.4 关节力矩(负荷)模拟
陈景辉、任金东[18]等的研究发现,肌肉负荷或关节力矩与姿势之间存在很大的关联,故通过关节力矩(作为肌肉负荷的一种度量)就可以来表征姿势不适度,从而建立不舒适度评价模型。
在CATIA中建立好作业工人抹灰姿势人体模型之后,通过姿势编辑器来调节人体模型的作业姿势。根据表2所确定的关节部位、关节动作、姿势角度变化范围,由初始直立的姿势开始,取其中一个关节姿势角度为变量,每隔5°来改变人体的作业姿势,由姿势角度变化范围的开始角度调节至终止角度,通过CATIA软件人体运动分析(HAA)模块中的生物力学单一动作分析(BSAA)给出不同关节动作姿势角度下的关节力矩。例如,上臂弯曲20°是指在初始直立姿势下,调节人体模型使上臂向前方弯曲20°,通过BSAA输出上臂弯曲20°状态下的肩关节弯曲力矩的数据值为10.5,如图3所示。

图3 生物力学单一动作分析输出上臂弯曲 20°时的力矩数值
同理,通过BSAA输出的人体上肢部分关节姿势动作随关节角度变化的部分关节力矩Mi,θ(第i个关节动作变化至θ角度时的力矩值)数据如表3。实验过程中发现调节不同关节角度后,手腕关节各自由度输出力矩无明显变化且均近似为零,故仅选取肩关节、肘关节为研究对象进行数据采集。
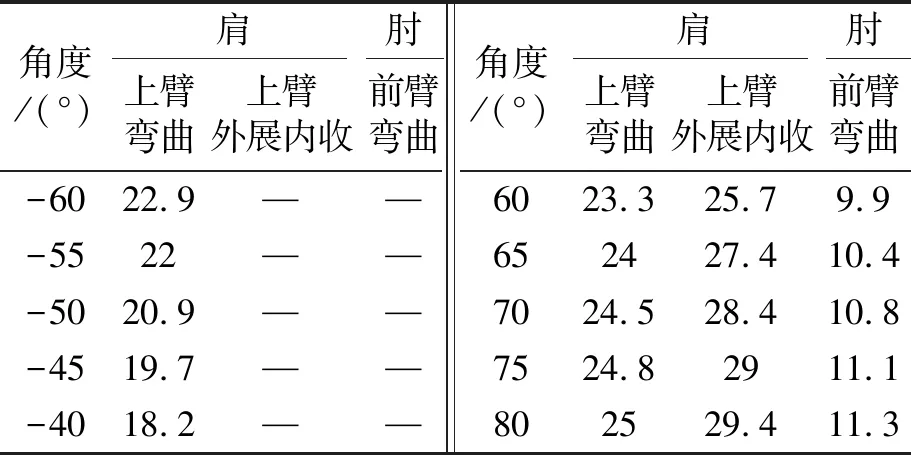
表3 上肢部分关节随关节角度变化的关节力矩Mi,θ
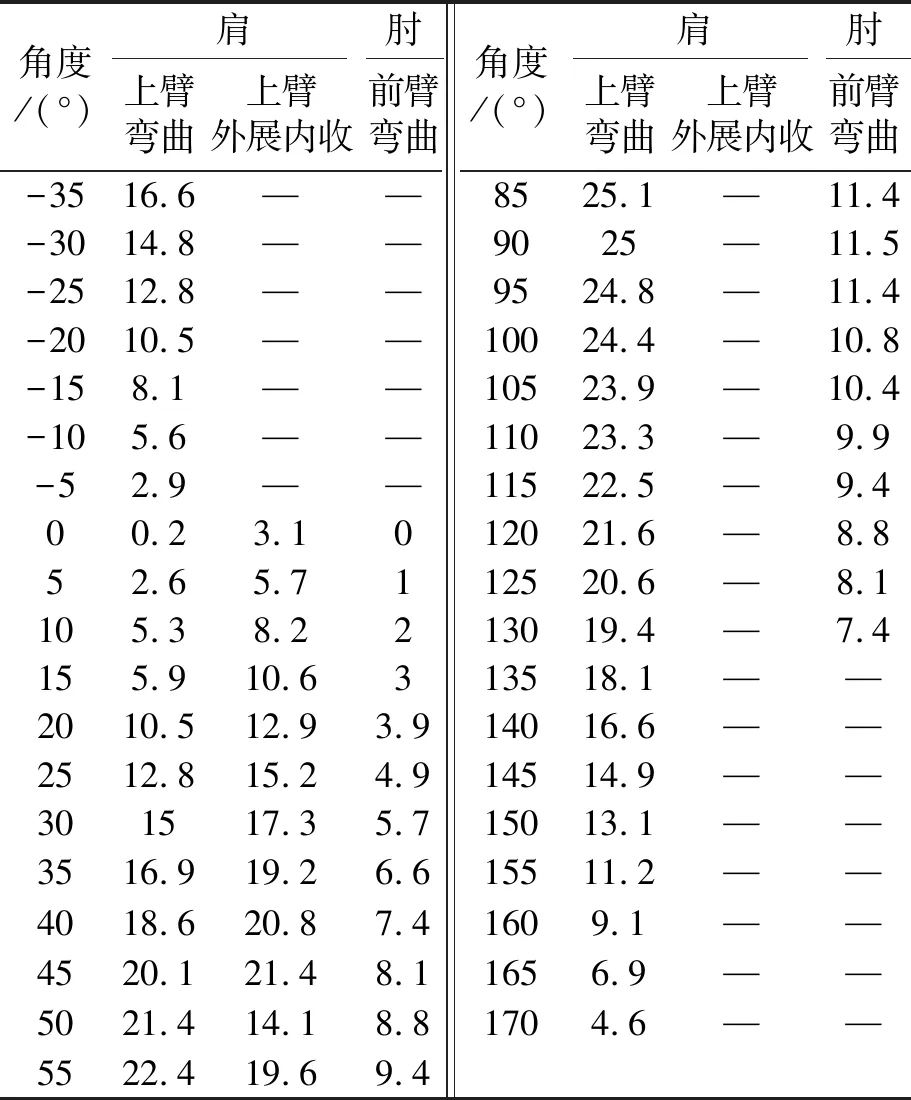
(续表)
2 上肢姿势不舒适度建模及评价
2.1 关节力矩数据的标准化
为了便于分析研究,将关节力矩不舒适度实验得到的表3部分关节力矩Mi,θ进行标准化处理,使得数值变化范围为110,标准化公式为:
(1)
式中:i为第i个关节;θ,α,β分别为为关节动作变化角度;Mi,θ为第i个关节动作变化至θ角度时的力矩值;minMi,β为第i个关节动作变化至β角度时能取得最小力矩值;maxMi,α为第i个关节动作变化至α角度时能取得最大力矩值;Di,θ为第i个关节动作变化θ角度时力矩标准化后的值,即关节动作不舒适度指数。
以肩部弯曲为例,计算上臂向前弯曲20°时,Mi,θ=10.5,minMi,β=0.2,maxMi,α=25.1,则肩部弯曲的不舒适度指数为Di,θ=(10.5-0.2)×10/(25.1-0.2)=4.14,同理,可计算其他关节所受力矩情况,表4即为人体上肢部分关节力矩标准化后Di,θ的数值。
关节负荷大小、肌肉收缩程度与人体疲劳密切相关,关节力矩越大,可用力矩越小,肢体越不舒适;肌肉收缩程度越大,人就越容易感到疲劳[19]。根据标准化公式(1)可知,实验得出的标准化数值Di,θ越大表示不舒适度感越强(越不舒适),数值越小代表不舒适度感越弱(越舒适)。
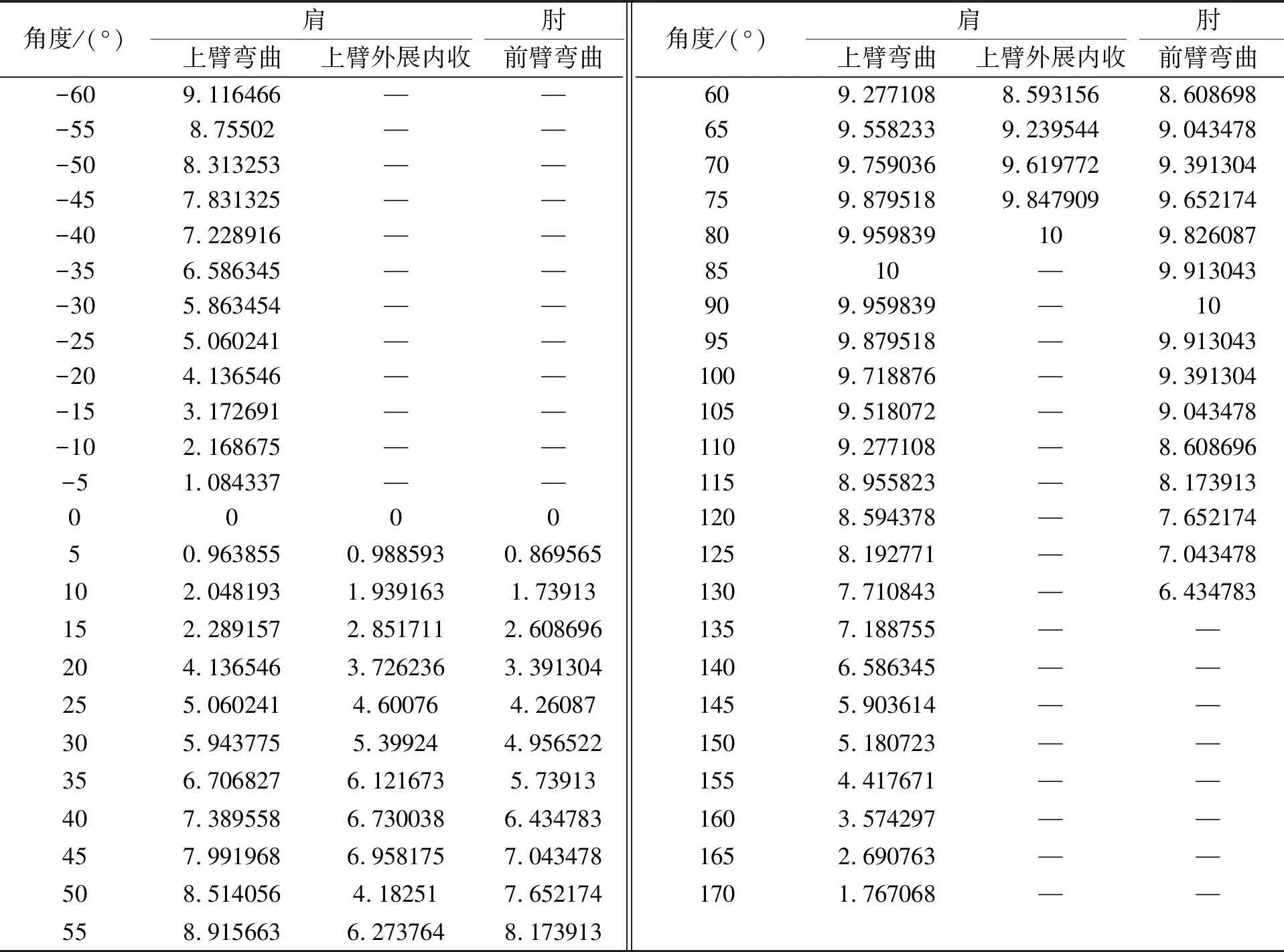
表4 人体上肢部分关节力矩标准化数值Di,θ
2.2 不舒适度模型构建
以肩部弯曲为例,将肩部关节弯曲角度θ、肩部弯曲的不舒适度指数Di,θ输入SPSS20软件当中,绘制得到随肩关节角度变化的不舒适度指数散点图,如图4所示。
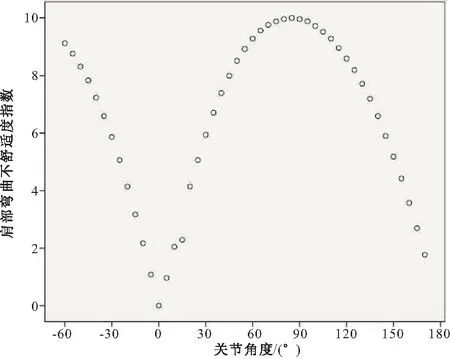
图4 肩部Di,θ随θ变化散点
从图4可以看出,肩部弯曲不舒适度指数随关节角度的变化呈现出明显的曲线变化规律,因此,可以采用多项式拟合曲线的方法。多项式拟合函数的一般形式[20]为:
y(x) =bnxn+bn-1xn-1+…+b1x+b0
(2)
式中:n为多项式的阶数;x为自变量;bn为自变量的系数;y(x)为因变量。
以肩部关节弯曲角度θ为自变量,肩部关节弯曲时的不舒适度指数D为因变量,利用SPSS20软件进行回归分析,根据图4散点图分布形状、相关的数学理论及SPSS20曲线估计中存在的模型类别,选择软件中的“线性、二次项、立方”来构建它们之间的模型关系,得到拟合曲线如图5所示,拟合相关数据如表5。
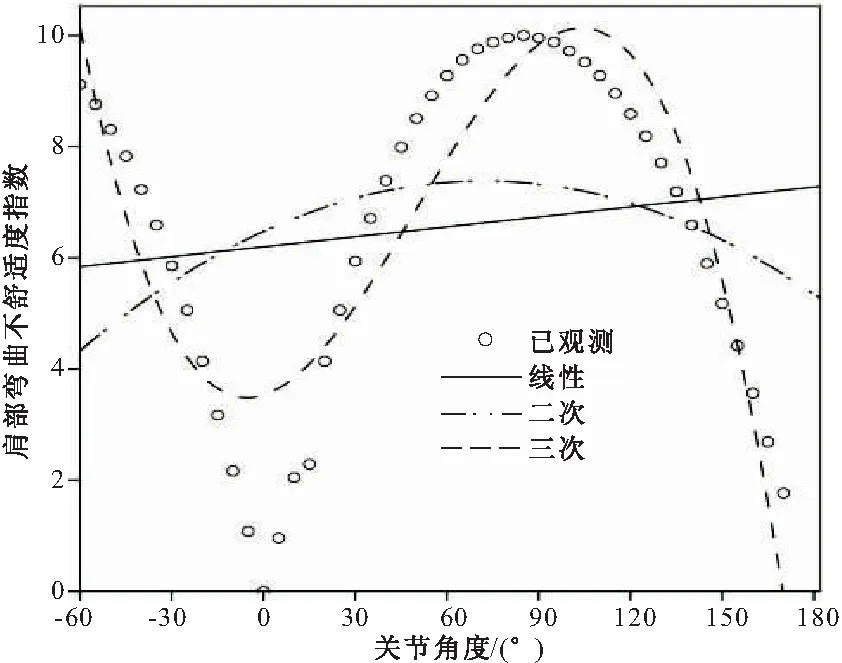
图5 肩部弯曲不舒适度曲线拟合

表5 模型汇总和参数估计值
注:自变量:肩部关节角度;因变量:肩部弯曲不舒适度指数
拟合优度的统计量是可决系数(亦称确定系数)R2。R2最大值为1,越接近1,说明回归曲线对观测值的拟合程度越好;反之,值越小,说明回归曲线对观测值的拟合程度越差。
通过表5的曲线回归分析可以看出:3次曲线的R2为0.813,该模型对数据有很好的解释能力,具有良好的拟合效果,所以最终选择3次曲线模型。由表5中各系数,可得到肩部弯曲的不舒适度模型为:
Y1=-1.018X3×10-5+0.002X2+0.017X+3.537
(3)
式中:Y1为肩部不舒适度值;X为上臂弯曲角度。
同理,多次利用SPSS回归分析的方法,就可以得到抹灰工人上肢其他部分关节在不同关节角度下的不舒适度指数方程的系数参数,如表6所示。
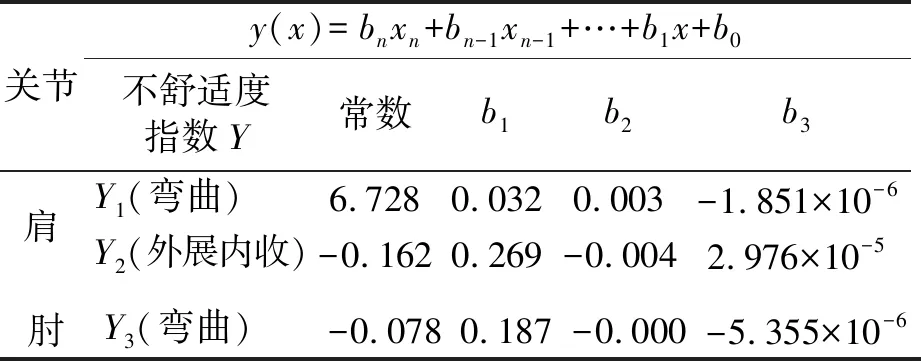
表6 人体上肢肩部、肘部关节不舒适度指数模型参数
3 结 语
本文以建筑抹灰工人上肢作业姿势为例,通过CATIA输出关节力矩(负荷)并使用SPSS建立了抹灰工人上肢肩部、肘部弯曲不舒适度模型,对工人实际操作姿势不舒适性具有较高的拟合度,可以快速评价工人抹灰作业时上肢瞬时不舒适度,为及时干预工人的不合理作业姿势减少肌肉骨骼疾患提供量化依据,同时,模型的建立方法也可为开展建筑业工人其他作业姿势研究提供借鉴。
但是,由于本研究仅以单一变量研究抹灰工人上肢局部静态姿势的不舒适度,存在一定的局限性且对于不舒适度的评判没有定量的标准,如何快速确定关节角度以达到快速确定不舒适度等问题都应在后续研究中解决。
