医用X 光机运动定位方法
2020-05-11初振东魏清超
初振东,魏清超
(1.中国电子科技集团公司第四十七研究所,沈阳110032;2.华能辽宁清洁能源有限责任公司,沈阳110000)
1 引 言
医用X 光机在实际工作时,需要对运动部件在运动轨迹上的位置进行准确定位,常用的运动部件有悬吊架、探测器、C 型臂、压迫器、机架等。根据运动部件的空间位置信息,系统可以控制医用X 光机完成各种摆位操作[1]。运动轴的位置定位精度直接影响医用X 光机的摆位准确性,进而影响拍摄图像的质量。
现有方案中,多采用电位计反馈的方式,对运动部件的位置进行定位。运动部件在其运动轨迹上运动时,通过机械结构,使得其对应的电位计阻值产生变化,数据采集模块可根据电位计阻值情况,定位到运动部件在其运动轨迹上的实际位置。在医用X 光机中,通过电位计反馈的方式进行位置定位时,主要有以下缺点:
1) 为了准确测量电位计的电阻值,需设计高精度的模拟处理和采集电路,而该部分电路的总体成本较高。
2) 运动部件在一个运动轨迹上运动时,必须对应一个电位计,当同一个运动部件可以多轴运动时,必须对应多个电位计,电位计数量的增加,导致安装繁琐,同时成本增加。
3) 运动部件运动时,如果其对应的电位计安装不当,容易造成电位计偏心旋转,使电位计损坏。
4) 电位计在首次安装时,需要根据行程位置,将电位计阻值调整到大概范围,调整不当,或者未经调整便进行运动操作,容易造成电位计超出额定范围,进而损坏电位计。
5) 电位计一般有三个引脚,分别为阻值最大端、阻值最小端和中间抽头端,而常用的激励方式为,阻值最大端接至正电源,阻值最小端接至负电源,中间抽头端接至数据采集模块。实际操作过程中,容易接错引线,导致部件运动至极限位置时,正负电源近似于短路,造成电路损坏。
通过加速度法可进行医用X 光机运动定位。配合固定位置处的光电开关和运动轴的电机电流,以计算运动部件的实时位置[2]。加速度定位法比传统的电位计定位法成本更低,且安装简单。当同一运动部件可以多轴运动时,通过一个多轴加速度传感器,便可获得位置定位结果,节省成本和安装空间。
2 系统结构
提供的医用X 光机的运动定位方法,通过高精度加速度传感器,配合光电开关和运动轴的电机电流,即可完成运动轴的位置定位。系统的结构框图如图1 所示。
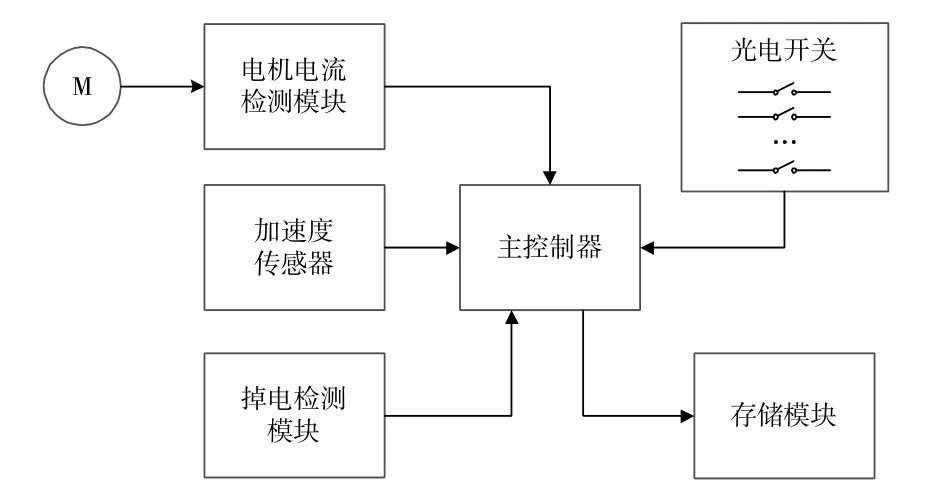
图1 系统结构框图
通过加速度传感器模块实时测量运动部件在运动轨迹上的加速度值,在同一时刻,需要多次采集传感器输出的加速度值[3],最后将得到的加速度值进行滤波处理,得到该时刻的真实加速度值。运动部件在运动过程中,其电机会有一定的电流输出,该电流输出被电机电流检测模块检测到。主控器通过加速度传感器模块输出的加速度值,和电机电流检测模块输出的电流值,计算出各个时刻点的加速度值。根据得到的加速度值,便可计算各时刻点的速度值,进而计算时间间隔下的位移值,最后根据位移累加的原则,计算运动部件的实时位置[4]。
在部件运动轨迹的固定位置处,会安装光电开关,光电开关的数量根据运动行程的长短,以及定位精度的需求确定。由于光电开关的安装位置固定,故运动部件每次触发光电开关时,主控器会重新记录运动部件的位置,进而消除通过加速度计算位移而产生的累积误差[5]。
为保证系统上电后可以记录之前的位置信息,设计掉电检测模块和存储模块。主控器根据掉电检测模块的检测结果,判断系统是否断电,如判断结果为系统断电,则通过存储模块保存当前的位置信息。
3 运动定位算法介绍
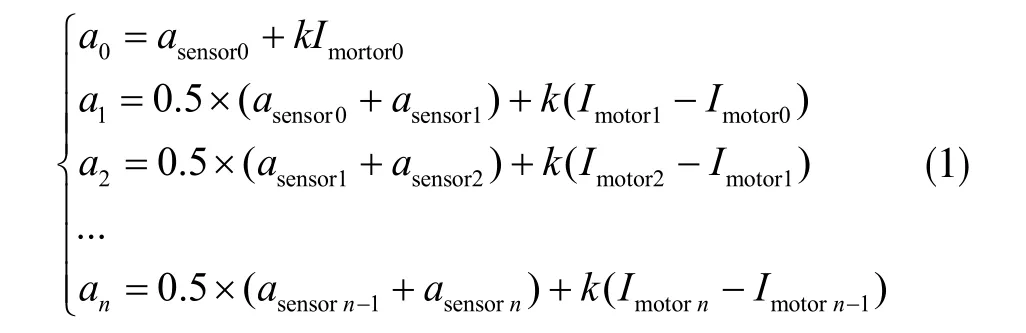
部件在实际运动过程中,存在由于机械安装等原因造成的卡滞现象,运动卡滞会直接影响加速度传感器的输出加速度值,即卡滞时的传感器输出加速度值并不能真实反映部件的运动加速度[6]。运动卡滞时,电机电流会产生变化,根据测试好的比例系数和电机电流变化量,可计算运动部件的真实加速度。部件在实际运动过程中,可能是变加速运动,故为了提高计算精度,在Δt 时间间隔下,取起始加速度和终止加速度的平均值作为Δt 时间间隔下的平均加速度[7]。
加速度计算公式如下:
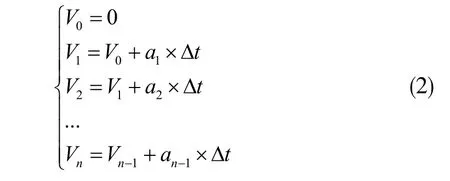
速度计算公式如下:
位移计算公式如下:

运动部件在运动过程中,如果没有触发固定位置处的光电开关,则其位置计算公式如下:

运动部件在运动过程中,如果触发固定位置处的光电开关,则根据光电开关的位置,更新当前位置,此时,其位置计算公式如下:

此后,在此位置基础上,再进行累计位移计算,进而消除积分运算的累计误差,提高精度。
4 系统控制流程图
系统控制流程如图2 所示。
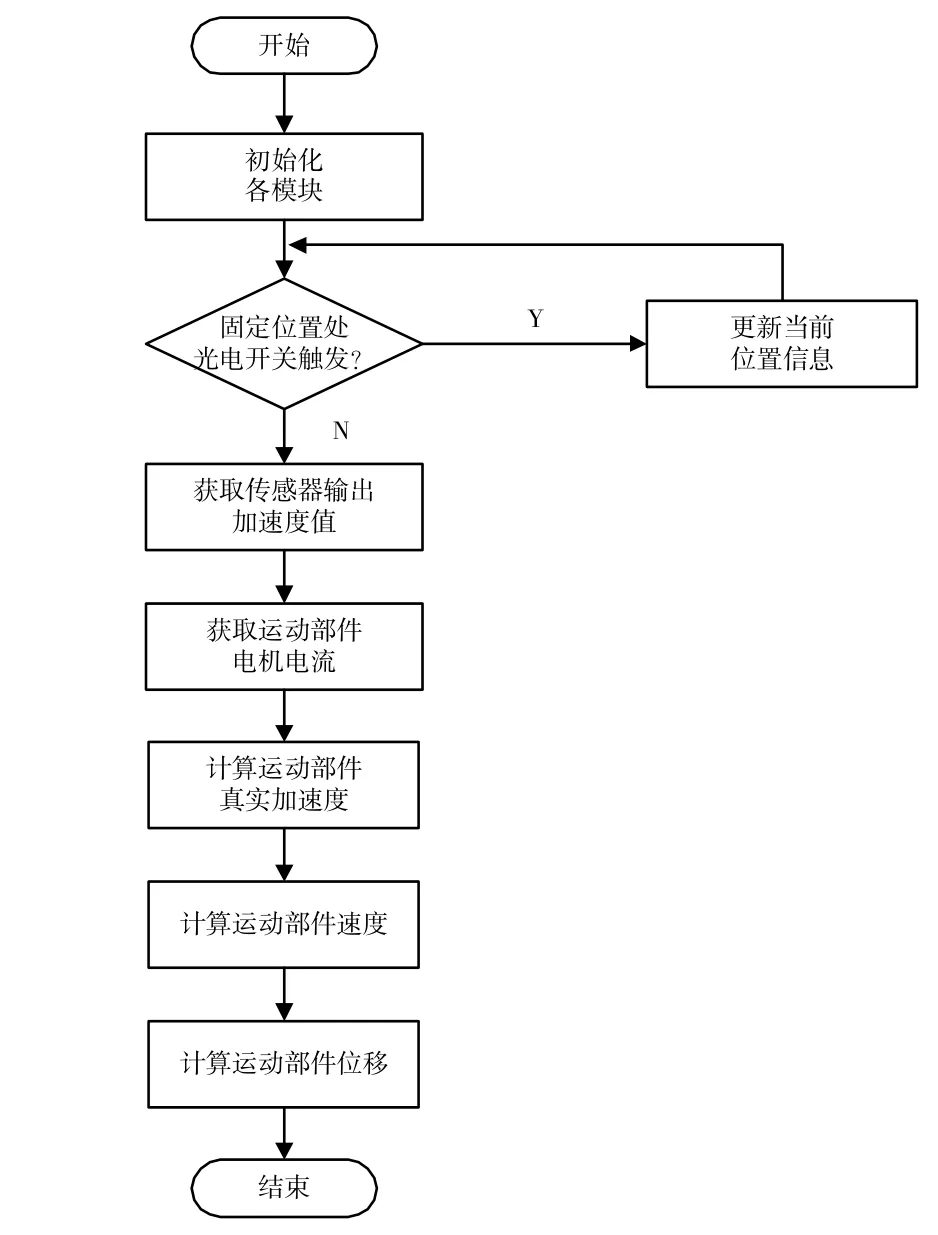
图2 系统控制流程图
初始化各模块后,主控器会判断是否有固定位置处的光电开关触发,如果有固定位置处的光电开关触发,则更新当前位置信息。如果没有固定位置处的光电开关触发,则获取加速度传感器输出的加速度值,实际应用时,需要多次采集加速度值,并对采集到的加速度值进行滤波处理,以便得到相对准确的加速度值[8-9]。得到传感器输出的加速度值后,主控器会采集电机的电流值,并根据电机电流的变化量,计算部件运动的实际加速度值。根据加速度值,可以计算部件的运动速度和实际运动位移。
5 结 束 语
通过“加速度定位法”实现医用X 光机的运动定位,通过加速度传感器实时测量运动轴的加速度,通过滤波算法得到准确加速度,根据加速度与位移的关系,计算运动位移,为了保证测量精度,需选用合理的时间间隔进行积分运算。同时在运动行程的固定位置处,安装光电开关,进而消除位移计算产生的累积误差,并且,实时监控运动轴的电机电流,根据校正好的比例系数,在电机电流突变处,对运动的瞬态加速度进行补偿,以提高测量精度。提出的“加速度定位法”比常用的“电位计定位法”成本更低,安装更加简单,具有较好的实用价值。
