超声电机的预压力特性分析与优化
2020-05-10郑杰基焦西凯范大鹏
郑杰基,陈 宁,焦西凯,刘 军,范大鹏*
(1.国防科技大学 智能科学学院,湖南 长沙 410073;2.南京航空航天大学 航空学院,江苏 南京 210016)
1 引 言
超声电机依靠定转子的摩擦作用传递驱动力,预压力作为保证电机内部摩擦驱动的关键因素,对电机工作性能及使用寿命有着至关重要的影响,因此,预压力特性的分析和优化在超声电机设计分析过程中成为一个不可忽视的科学问题。
在预压力对频率特性的影响研究方面,PIRROTTA等[1]采用分布数值模型和有限元模型对预压力函数的一阶共振频率进行了研究。他发现一阶共振频率对预压力不敏感,然而其结果并没有被进一步的实验结果所证实。在此基础上,OH等[2]对不同预压力下的共振频率和反共振频率进行了测试,证明了谐振频率和反谐振频率均与预紧力呈正相关。然而,LI等[3]发现这两个频率并不随着预压力的增加而单调增加,但他的数据是从阻抗分析仪收集的,该分析仪只提供小振幅电压(0~10 V)。
在预压力对表面接触特性的影响研究方面,接触状态是预压力对摩擦力和输出扭矩的重要贡献。CHEN等[4-5]通过考虑径向滑动因子的半解析模型建立了接触模型,仿真结果表明,当预压力增大时,接触区和驱动区同时变宽,径向滑动加剧。他在接触模型中考虑了接触层的变形和标准刚度,证明了接触区域变宽,各接触点的压力随着预压力的增大而增大,但分析时缺乏对负载条件下接触状态的研究。
在预压力对机械特性的影响研究方面,机械特性综合了频率特性和接触特性的结果,因为前者决定了输入功率,后者会影响输出功率和输出力矩。BULLO和曾劲松等学者[6-13]从仿真和实验角度分析了预压力对电机性能的影响,但他们的研究大都不够全面,仅分析了预压力对电机的影响,并未根据分析结果提出一种预压力优化的准则,确定出超声电机预压力的理想工作区间,因此未能将分析结果转化为电机性能的提升。
此外,超声电机在运行过程中存在的温升和速度波动均受到预压力不同程度的影响。前人虽提出了一些温度补偿控制策略[14-15]和速度平稳性控制策略[16]以获得更好的速度控制性能,然而,多数学者忽视了预压力在温度变化和速度波动中的作用。
综上所述,超声电机预压力特性的分析和参数优化方法对于超声电机的设计、制造、装配以及控制效果等都具有重要意义。本文通过仿真和实验测试的方法,对预压力和电机接触特性、速度稳定性、机械特性以及温升特性的映射关系进行了较全面的研究,并依据分析结果提出了一种预压力优化准则,确定了超声电机理想的预压力工作区间,使电机各项性能均达到较理想的状态。
2 预压力调控及监测装置
性能优良的预压力调控装置是分析超声电机预压力与性能之间映射关系的基础。前人的预压力施加装置多通过螺旋进给方式且依靠手动对预压力进行调整,具有调节困难、精度不高的缺点。本文采用伺服电动缸作为预压力施加装置,当控制电动缸的伺服电机工作在力矩模式时,其输出力可基本保持恒定,利用这一特性可以实时在线地改变预压力,且导向精度高、施加力均匀。电机在运动过程中轴向压力的测量需要高精度的压力传感器。根据预压力0~600 N的需求,遴选了上海会通的直线型电动缸和广州斯密特的VC20石英型压力传感器,其中VC20还配套ST100压力数显表,能够实时观测压力,而压力变化曲线在测控处理器上进行观测。
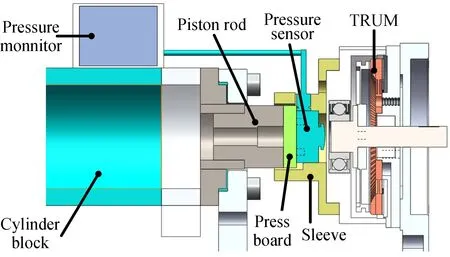
图1 预压力施加及监测装置Fig.1 Device for adjusting preload force
3 预压力对电机性能的影响
3.1 预压力对接触特性的影响
从直观上看,预压力变化最直接的影响就是定转子间接触界面。TRUM60A型超声电机运行时在定子圆周上具有9个行波,每个行波所占角度为40°,其中接触角Xc和驱动角Xs可表示为:
(1)
其中:ξ表示模态振幅,h表示压电层合板中性层厚度,λ表示行波的波长,fs代表驱动频率,Ωr为转子的角速度,Rsc为横向位移振型函数在定子环等效半径R0处的取值。
控制预压力在0~600 N内,通过仿真观察其接触区域的变化,图2(a)为空载条件下改变预压力时的接触角度与驱动角度的变化情况。可以发现,随着预压力的增加,接触区逐渐由0°开始增大,起初上升趋势较快,在中段即100~580 N以约0.033 (°)/N的斜率增大,预压力升至580 N后上升斜率陡增,并迅速到达40°,此时定转子处于全接触状态。而驱动角度在从0 N时的40°跳变后便一直以稳定的斜率上升,斜率始终远小于0.033 (°)/N。进一步比较驱动角度与接触角度的比例关系(图2(b)),可知随着预压力的增大,驱动区在整个接触区内所占的比重逐渐减小,接触过程的径向及切向摩擦损耗都随之增加。
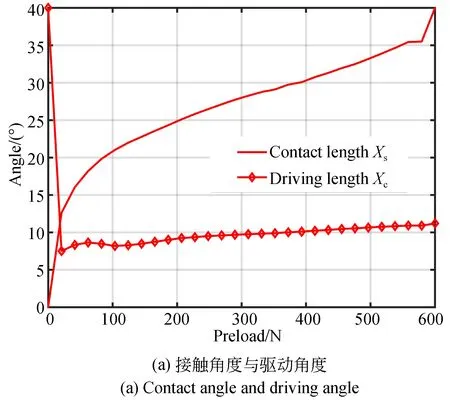
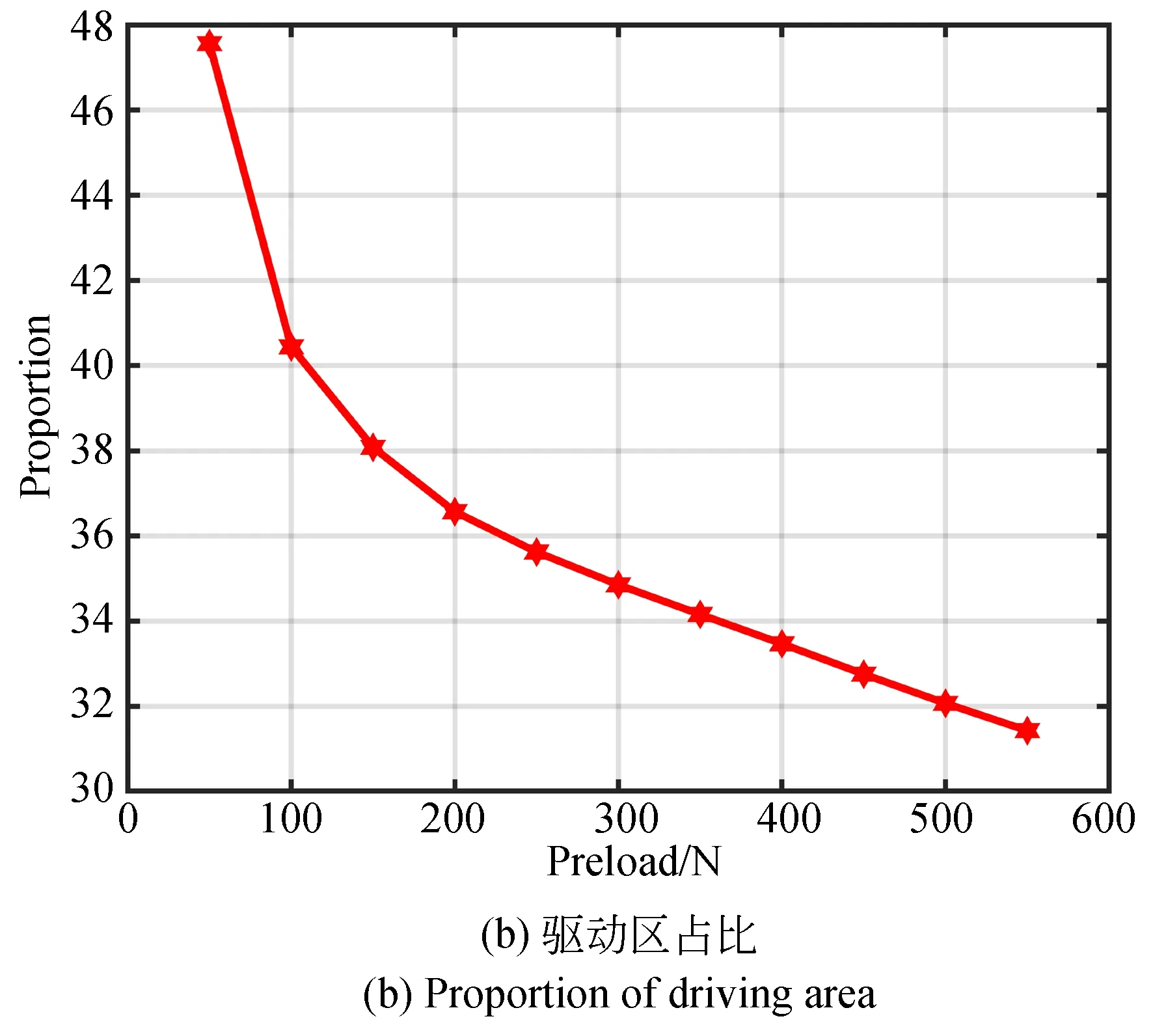
图2 一个行波内不同预压力的接触情况Fig.2 Contact under different preload forces within a single traveling wave
3.2 预压力对速度波动的影响
超声电机工作时,定子齿与摩擦层的接触状态存在周期性变化,且并非均匀分布。由于加工、制造及装配误差,定转子难以实现绝对的严格对中,转轴相对定子中心存在偏心倾斜状态。此外,由于定子齿表面粗糙度和摩擦界面磨损的发生,电机运转时的速度波动不可避免,因此有必要探究预压力对于速度波动的作用,以便选取能有效抑制转速波动的预压力范围。
设置驱动频率为43 kHz,在500 s时间内,以25 N为间隔逐渐改变预压力,观察电机速度波动情况,得到图3所示的速度响应曲线(彩图见期刊电子版)。图中红色曲线与蓝色曲线分别对应的电压幅值为200 V与240 V。由图可知,随着预压力的增加,电机转速先增大后减小,转折点处的预压力约为275 N。从该预压力开始,电机的等速点及接触点变化加剧,摩擦层逐渐嵌入齿隙使得损耗开始增大,速度响应则随之下降。对速度波动采用标准差进行评估,择取每一段预压力持续过程的速度曲线进行标准差换算,结果表明,伴随着预压力的增大,速度平稳性逐渐提高,说明预压力对速度波动起一定的抑制作用。
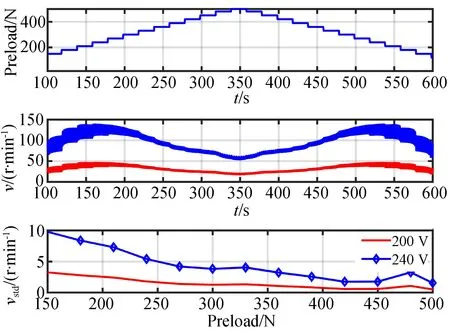
图3 不同预压力条件的速度稳定性Fig.3 Velocity stability under different preload forces
在获得速度曲线的同时,通过压力传感器得到了同样处于波动状态的轴向压力,为了探究速度波动与动态压力的内在关系,借助公式(2)反解得到动态压力Fz为自变量、接触角度Xc为因变量的多项式(3),该表达式重新建立了动态压力与接触区域的映射关系。
(2)
Xc=2.7×10-16Fz7-6×10-13Fz6+
5.4×10-10Fz5-2.5×10-7Fz4+
6.4×10-5Fz3-0.0088Fz2+0.65Fz+0.72.
(3)
图4是预压力为150 N和200 N时的实时速度、角位置、动态压力和解算出的接触角度。可以观察到动态压力、接触角度和速度波动均以360°为周期,这说明波动主要来自于转子轴的非对中误差,且波动周期随着速度下降而持续增加。
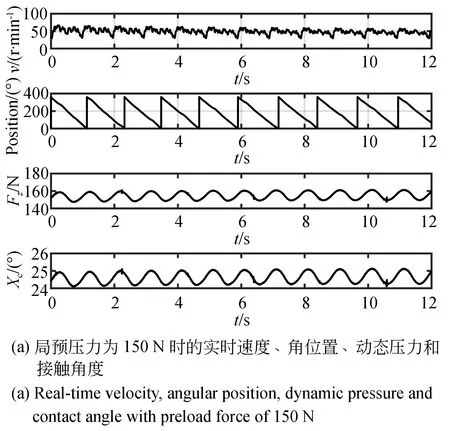
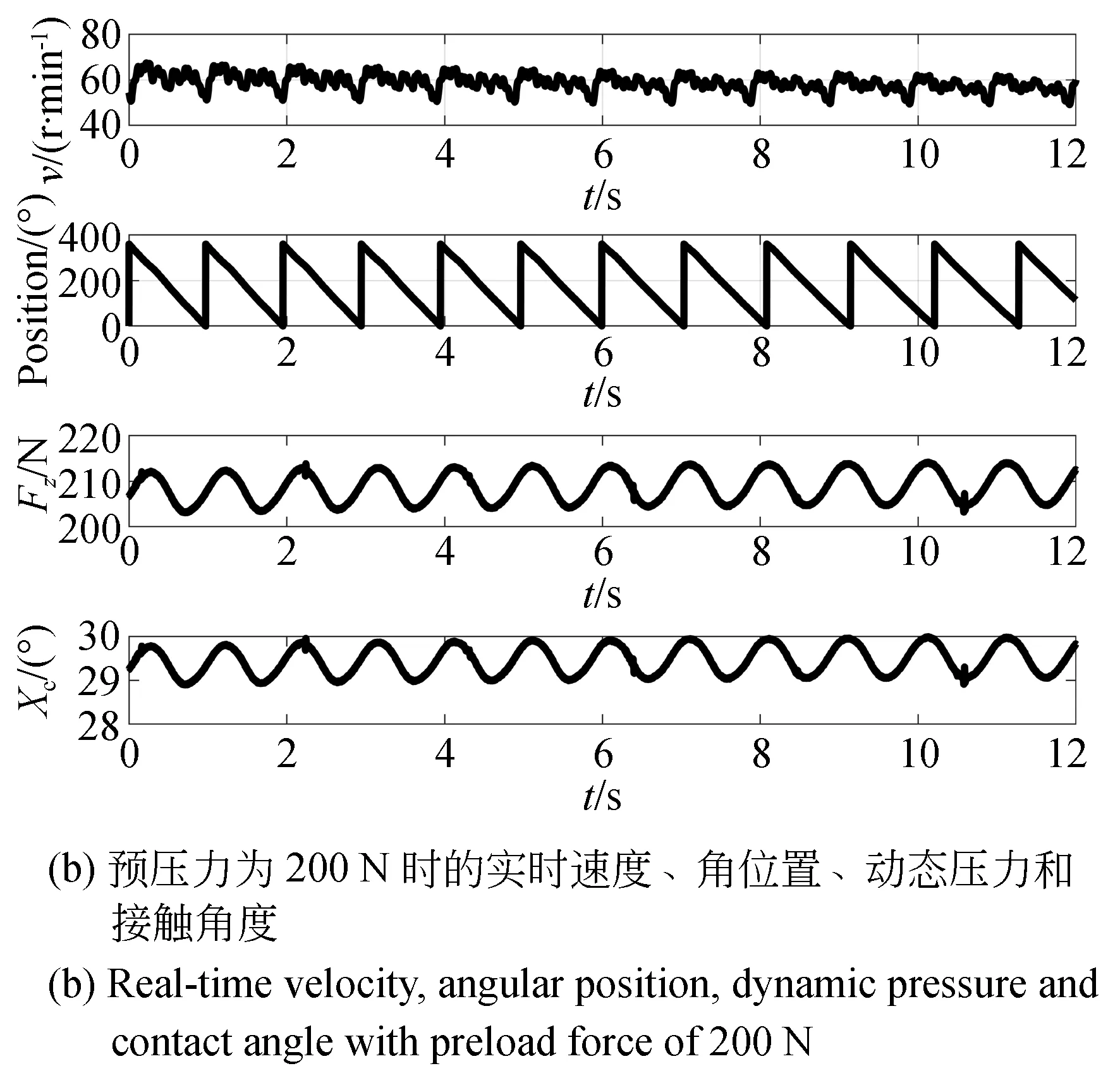
图4 动态压力波动的时域分析Fig.4 Time domain analysis of dynamic preload force fluctuation
当预压力为150 N时,接触区的波动角度范围为1.01°,在整个接触区24.15°中占比4.18%;而预紧力为200 N,接触角度和波动角度分别为28.94°和0.9°,占比变为3.11%,由此表明,预压力增加对定转子的约束程度加大,有助于减少速度波动。
3.3 预压力对机械特性的影响
从电机带载能力与效率上看,接触状态的影响最终都会体现到机械特性上。图5(a)和图5(b)分别是预压力介于50~550 N时的预压力-转矩-速度曲面与预压力-转矩-效率曲面。从预压力-转矩-速度曲面可发现,在任意负载条件下,转速随预压力的增大呈现出先增大后减小的趋势,且最大速度点从空载时的275 N逐渐过渡到带载1 N·m条件下的400 N。从预压力-转矩-效率曲面可以看出,随着预压力增大,最大效率点逐渐向大转矩方向移动,同时机械效率最大值也呈现出先增大后减小的趋势。


图5 不同预压力条件的转矩-转速-效率特性
3.4 预压力对功耗及温升的影响
摩擦损耗是电机能量损耗和温升的主要因素,预压力的变化引起的接触状态改变,导致摩擦损耗随之变化。为了保证单因子调控原则,实验测试的启动温度均为28 ℃,且开关电机在相同的操作时间内完成。将预压力从200 N,每隔25 N增加到400 N,研究预压力对速度与界面温度的影响,电机启动后的转速和界面温度变化见图6(a)和图6(b)。电机启动后,速度逐渐下降温度逐渐上升,一段时间后两者均趋于平稳,这表明热量积累是逐渐实现的。图6(c)为不同预压力时电机运行200 s后的速度下降量和界面温度上升量。由图可知,预压力为375 N时温度上升量达到最高值,稳态速度却最小,在该预压力下电机速度下降过快,电机发热严重,温度急剧上升,不适于电机的精确控制,原因在于预压力过大引起接触宽度激增,摩擦产热大幅增加;而在预压力为300 N时,速度下降与温度上升均达到极小值,这说明电机预压力控制在该值附近时,速度稳定性好且发热温升最小。其原因为此预压力下定子齿面与摩擦层之间的接触状态达到最优,使定子与转子之间的周向与径向摩擦损耗最小。很明显,过快的温升不利于最终的速度位置控制。
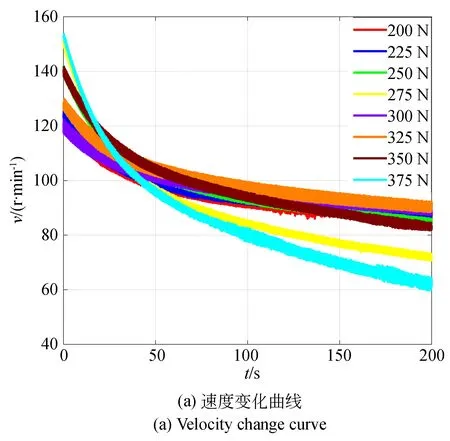
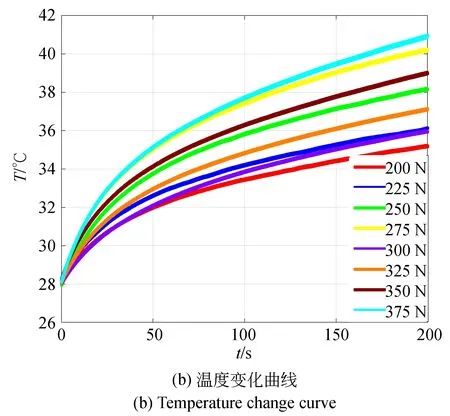
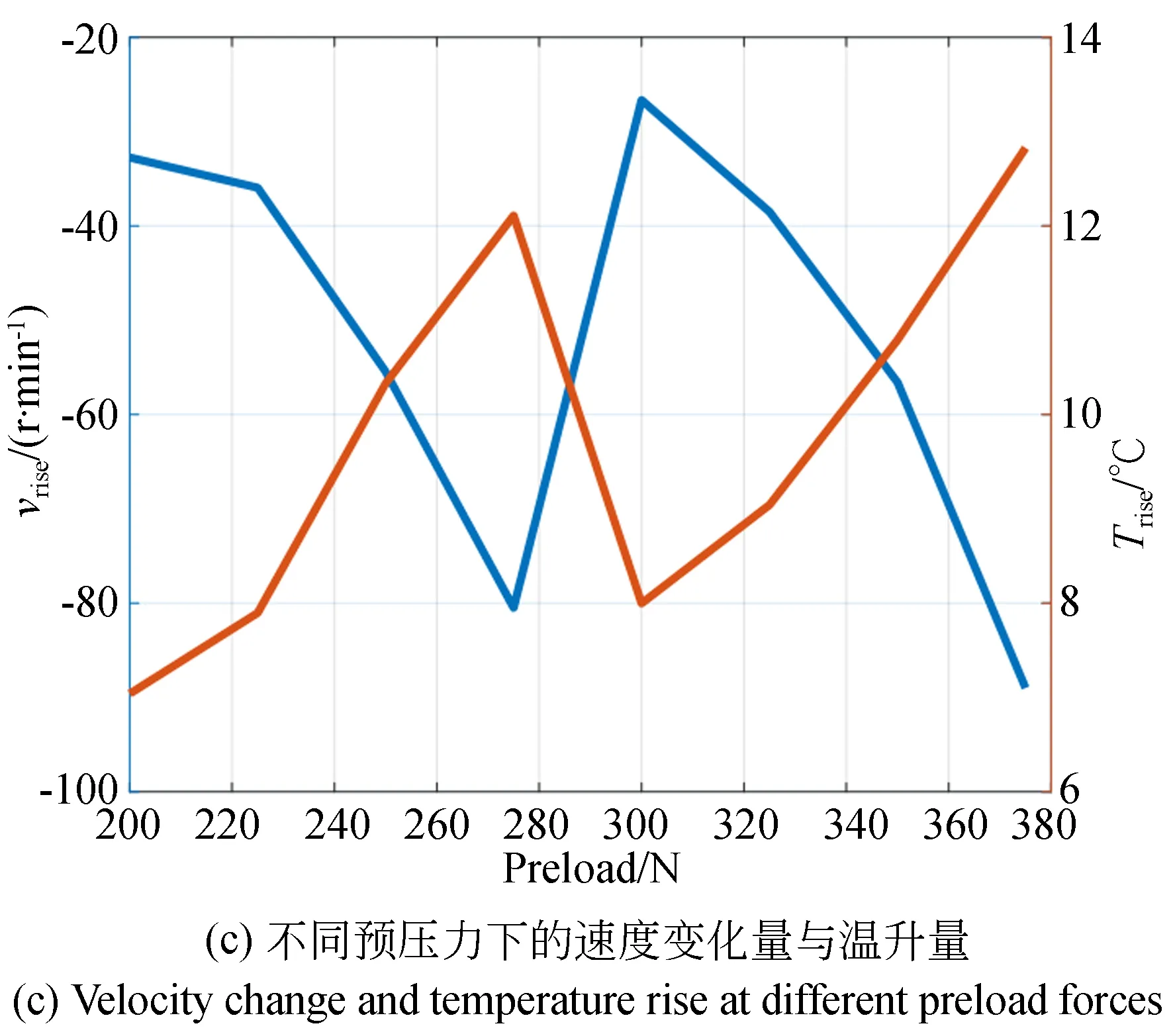
图6 不同预压力条件下的特性变化Fig.6 Characteristic changes under different preload forces
4 预压力优化准则
由上述测试及分析结果可知,预压力对超声电机的影响覆盖了超声电机的主要性能,可得到以下结论:
(1)无论在何种负载条件下,速度随预压力的增大都是先增加后减小;
(2)空载条件下的速度波动随着预压力的增大持续减小,速度稳定性与轴向的压力波动和接触状态变化密切相关;
(3)不同预压力电机的堵转力矩和最大效率均存在一个峰值点,堵转力矩的峰值点为320 N,而最大效率的峰值点为260 N;
(4)电机的温升主要来源于摩擦损耗,受预压力影响较大,温升量在预压力为300 N时存在一个极小值。
选取测试的典型结果,汇总到同一坐标系中,如图7所示(彩图见期刊电子版),可以较全面观察不同性能随预压力的演变规律,并根据上述4个结论提炼出以下4条预压力优化准则:
(1)由堵转力矩曲线可知,预压力为320 N时电机出力最大,若电机运用于高出力场合,则预压力约为320 N;
(2)由效率曲线可知,预压力为260 N时电机效率最高,若要求电机高的工作效率,则预压力应取在260 N附近;
(3)由速度标准差曲线可知,速度波动与预压力负相关,若要求电机小的速度波动,预压力应尽可能大;
(4)由温升曲线可知,温升量在预压力为300 N时达到最小值。为了延长超声电机的使用寿命和保证电机稳定工作,预压力取为300 N左右时,阻碍区和驱动区能够达到平衡。
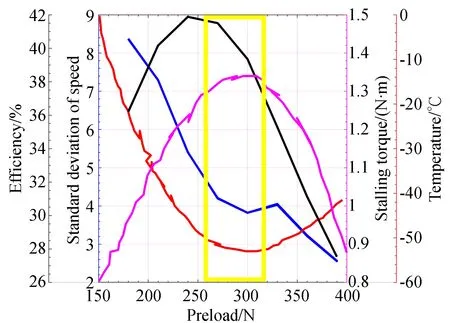
图7 预压力最优工作区间Fig.7 Optimal working range of preload force
为了提高超声电机的综合性能,使电机在拥有较大的出力、较高的工作效率的基础上兼顾较小的速度波动和温升,因此以最大效率曲线峰值对应的预压力为左边界,以堵转力矩曲线最大值对应的预压力为右边界,确定了TRUM60A型超声电机的理想预压力区间为260~320 N,如图7所示的黄色矩形区域。该区域既能满足低速稳定、温升小的要求,又能使制动力矩和机械效率达到理想范围,是该电机应用时较理想的工作区间。
5 结 论
本文通过仿真分析了预压力对超声电机接触角和驱动区占比的影响规律,通过实验测试的方法探索了在不同预压力下速度波动与压力波动的关系,对电机在不同的预压力和转矩时的速度与效率进行了分析,最后测试了电机在运行200 s后的温度变化情况,并根据测试分析结果提出了一种预压力最优工作区间的评定准则。若要求电机出力较大,则预压力应取约320 N;若要求电机的输出效率高,则预压力应取在260 N附近;若要求电机的速度波动小,预压力应尽可能大;若要求温升较小,则预压力为300 N左右。利用该准则,确定了TRUM60A型超声电机的预压力较为理想的工作区间为260~320 N,在该预压力范围内电机的各项性能均能达到较理想的状态。
对于超声电机的设计制造而言,本文提出的预压力优化准则可快速确定电机的理想预压力区间,有助于超声电机制造装配工艺优化、机械特性改进以及高精度控制算法等工作的开展。
