声呐目标跟踪关联中的模糊关联方法
2020-05-09石超雄陶剑锋张路蔚
石超雄,陶剑锋,张路蔚
声呐目标跟踪关联中的模糊关联方法
石超雄,陶剑锋,张路蔚
(中国船舶重工集团第七一五研究所,浙江杭州 310023)
声呐目标跟踪关联是为了获得精确的状态和属性估计、完全和实时的态势和威胁评估。在多台声呐系统联合探测中,根据相同目标、不同观测具有相似特征,提出了声呐目标模糊关联算法。模糊关联能够处理模糊性和不确定性信息,求解具有相似特征目标的关联值。通过将探测目标的方位数据模糊化,利用观测的模糊量和模糊隶属度函数进行数据关联,计算关联时长内两台声呐探测目标方位的关联值,仿真分析验证了上述算法的有效性并取得了较好的实验效果。
跟踪关联;模糊隶属度;模糊关联
0 引言
对声呐系统目标进行数据关联融合,通过对满足条件的目标方位等信息进行目标关联,能够提高对目标的检测、定位和识别能力。在多台声呐实时联合目标探测跟踪过程中,同一个目标在不同声呐上形成的观测,会由于其来源相同而具有某种相似特征,同时也会由于杂波干扰、噪声和观测的声呐系统性能的差异性而导致这些观测的目标特征存在一定的差异。数据关联通过利用目标的这种观测相似特征,判别目标量测的相似而不完全相同的特征是否对应于同一个探测目标[1],从而得到多节点联合探测的目标综合态势。
在跟踪过程中出现新的目标,需要对连续的多个采样周期进行“观测”与“观测”的目标数据关联,对观测数据的关联融合需要进行“观测”与“航迹”关联,进而更新目标信息,确定目标航迹修正后的观测。本文提出了基于模糊理论的多节点数据关联算法,对不同探测节点的目标信息进行关联分析,实现同一目标在不同声呐系统上观测的正确关联。仿真试验结果表明该方法能够有效地解决纯方位航迹相关的问题。
1 目标方位数据关联
水中目标信息来源于不同声呐基阵的探测目标。声呐系统送出方位、距离等信息,需要将不同声呐探测目标的信息转换到统一坐标系上,而且时间上也要统一。数据关联流程图如图1所示。
1.1 方位数据平滑预处理
水声环境复杂、声呐系统差异、输出信息精度不一样等各种因素会导致水声探测信息在很多时候并不稳定,跟踪级数据质量对后续航迹数据关联正确率、稳定度有较大影响。因此,在进行航迹数据关联前需要对方位距离数据进行平滑、预测等必要处理,以形成质量较好的航迹数据。数据预处理流程如图2所示。

图1 目标方位关联流程图

图2 数据预处理
数据平滑有线性和非线性两大类方法。经过仿真比较多种算法,不管对匀速目标还是非匀速目标,非线性处理方法效果都较好。可采用时间序列指数平滑法、中值均值结合平滑法等方法,这些方法实现简单,宽容性、处理效果均较好。
1.2 时空统一处理
时空统一处理在数据关联中有很重要的作用,处理过程中需要将不同声呐目标在不同时刻、不同坐标系下的信息统一转换到同一时刻、同一坐标系下同类型的信息再进行其他后续处理。处理实施流程如图3所示。


图3 时空统一流程图
测值可以通过以下插值公式得到:

该式适用于内插、外推两种情况,一般按照匀速直线运动进行推算。
2 模糊数据关联
2.1 基于模糊量相似度的数据融合算法
该算法通过对探测目标方位数据模糊化,得到方位数据观测的模糊量,然后计算不同目标航迹方位数据模糊量之间的相似关联度,得到目标方位数据模糊量相似关联度矩阵。设定关联度阈值,计算各目标的航迹关联对,判定不同探测节点的目标方位航迹相关[2]。

参考序列模糊量:

式(2)中:



比较序列模糊量:
式(6)中:


分别计算比较序列和参考序列纯方位模糊量的相似度:

其中:



2.2 基于模糊隶属度函数的模糊关联算法


(1) 偏小型:

(2) 偏大型:

(3) 中间型:

基于隶属度函数的模糊关联步骤:


(4) 计算比较序列与参考序列的关联值:
3 实验验证
3.1 模糊量数据关联仿真
设1-1为参考序列,1-2,…,2-1,…,2-4为比较序列,函数输出为参考序列和比较序列关联度。第一列为参考序列,第二列至第八列为比较序列,得到各目标与1-1的关联概率,正确关联应该是1-1与2-1关联概率最大,图6是模糊量关联不同探测误差下的关联概率。

图4 声呐1测得的目标方位图

图5 声呐2测得的目标方位图

图6 不同探测误差下的目标方位模糊量关联概率


表1 目标方位模糊量关联概率
由表1可以看出,模糊量关联虽然正确关联概率高,但是其区分度比较低,不利于目标分类。
3.2 模糊隶属度关联仿真

图7 目标运动轨迹

图8 声呐1测得图7所示目标的方位

图9 声呐2测得图7所示目标的方位
经过100次蒙特卡罗实验,得到模糊隶属度关联概率如表2所示。
由仿真结果可以看出,虽然正确的关联概率比模糊量关联正确率低,但是其区分度比较明显,即不是同一目标的关联概率低,这对跟踪目标分类融合结果有利。而且这种方法在建立模糊隶属度函数求关联值过程中,不需要预先知道声呐探测系统目标探测的误差。
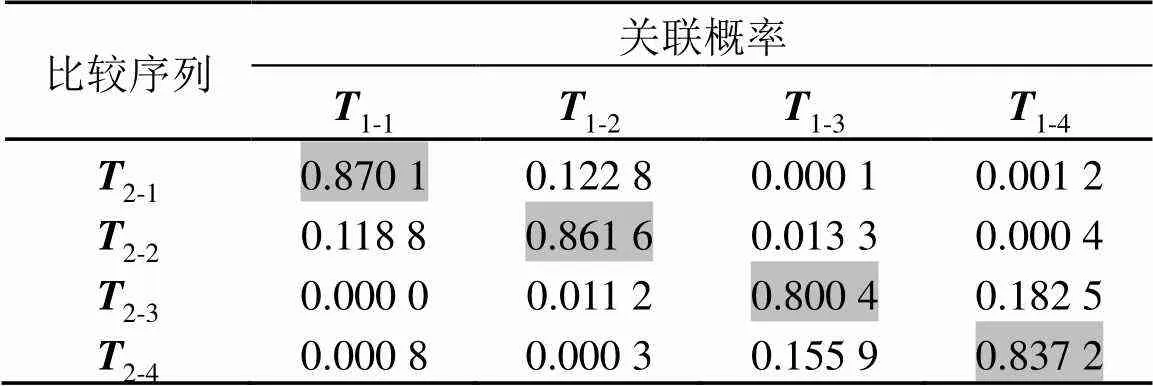
表2 目标方位模糊隶属度关联概率
4 结论
本文提出了基于模糊隶属度函数的模糊关联算法,该方法相对于模糊量关联算法,不要求系统的方位探测误差。实验结果表明,同一目标在不同误差的系统上做模糊隶属度函数关联,能够区分不同目标,有一定的关联准确率。
在下一步的工作中,将研究声呐目标频域特征的模糊隶属度函数形式对目标模糊关联准确率的影响,同时利用这两种相互独立的特征提高相同目标的关联概率。
[1] 刘源. 基于模糊信息处理的数据融合方法研究[D]. 陕西: 西安电子科技大学, 1999.
LIU Yuan. The reseach of data fusion based on fuzzy information processing[D]. Xi’an: Xidian University, 1999.
[2] 何友, 王国宏, 陆大紟, 等. 多传感器信息融合及应用[M]. 北京: 电子工业出版社, 2000.
HE You, WANG Guohong, LU Daqian, et al. Multisensor information fusion with applications[M]. BeiJing: Publishing House of Electronics Industry, 2000.
[3] 韩崇昭, 朱红艳, 段战胜, 等. 多元信息融合[M]. 北京: 清华大学出版社, 2010.
HAN Congzhao, ZHU Hongyan, DUAN Zhansheng, et al. Multi-sources information fusion[M]. Beijing:Tsinghua University Press, 2010.
[4] 何友, 王国宏, 陆大紟, 等. 多传感器数据融合模型综述[J]. 清华大学学报, 1996, 36(9): 14- 20.
HE You, WANG Guohong, LU Daqian, et al. Summary of multisensor data fusion model[J]. Journal of Tsinghua University, 1996, 36(9): 14-20.
[5] 肖冠. 基于多特征融合的异类传感器中段目标关联算法研究[D].长沙: 国防科技大学, 2013.
XIAO Guan. The research based on the target association algorithm of the middle segment of heterogeneous sensor based on multi-feature fusion[D]. Changsha: National University of Defense Technology, 2013.
[6] 朱沛胜. 多目标数据关联算法研究[D]. 西安: 西安电子科技大学, 2001.
ZHU Peisheng. The research on multi-target data association algorithm[D]. Xi’an:Xidian University, 2001.
[7] HOU Y L. Multiple-sensor fusion tracking based on square-root cubature kalman filtering[J]. Joural of Networks, 2014, 9(7): 132- 136.
[8] TIWARI R, GUPTA V K, KANKAR P K. Bearing fault diagnosis based on multi-scale permutation entropy and adaptive neuro fuzzy classifier[J]. Journal of Vibration and Control 2015, 21(3): 461-467.
The fuzzy association method for target-tracking association of sonar
SHI Chaoxiong, TAO Jianfeng, ZHANG Luwei
(715th Institute of CSIC, Hangzhou 310023, Zhejiang, China)
Target-tracking association of sonar is a comprehensive processing technique, which can achieve more accurate state and attribute estimation and more complete real-time situation and threat assessment than the single information source through smartly combining the multi-source information of targets. In this paper, the multiple sensors based fuzzy correlation algorithm is proposed on the similarity of different observations of the same target. The method is used to process uncertain information for finding the difference between illegible targets, and the correlation value of the target orientations within the correlation time is calculated by blurring the target orientation data based on the fuzzy set definition of observation data and the fuzzy membership function. The validity of the above algorithm is verified by simulation analysis, and good experimental results are obtained.
target-tracking association; fuzzy membership degree; fuzzy association
TB56
A
1000-3630(2020)-02-0141-05
10.16300/j.cnki.1000-3630.2020.02.003
2018-08-12;
2018-12-06
装备预研项目(30202)。
石超雄(1987-), 男, 湖北黄冈人, 工程师, 研究方向为水声信号处理和数据融合。
石超雄,E-mail: scx610192559@163.com
