基于AVL-Cruise的纯电动车性能仿真*
2020-05-09宫唤春
宫唤春
(河北东方学院;中汽工程研究院)
目前纯电动汽车已经成为国内外各大整车企业及相关研究机构的研究热点[1]。在纯电动汽车开发过程中,整车性能目标以及相应的电动机、电池组、减速器等动力总成参数的选型对整个开发过程起着关键性的作用。因此,对整车性能的精确预测对于纯电动汽车的开发就显得特别重要。AVL-Cruise 软件具有建模简单、车型数据库强大、能够进行可视化分析等特点,所以广泛用于整车性能仿真分析,能够为纯电动汽车的设计与开发提供技术保障[2]。文章在此软件的基础上建立仿真模型并进行计算分析,为整车性能仿真分析研究提供参考。
1 纯电动汽车整车性能分析及建模
文章分析的纯电动汽车整车性能通常是指其等速续驶里程、100 km 耗电量、整备质量及动力性。以某纯电动轿车为例,利用AVL-Cruise 软件建模,计算相关性能指标。纯电动轿车相关参数,如表1所示。

表1 某纯电动轿车性能指标与总成参数
模型的准确性直接影响计算结果的精度,根据要分析计算的整车性能指标并结合表1,在建模过程中需要注意以下问题[3]:
1)整车参数:包括整车尺寸、质量、空气动力学参数、阻力模型(包括滑行曲线);
2)电机参数:包括电机额定功率下的外特性曲线和效率特性曲线、峰值功率下的外特性曲线和效率特性曲线、不同电压的效率曲线和外特性曲线等;
3)电池组参数:包括电池单体的电压、容量、不同温度下的充放电曲线、不同温度下的内阻特性曲线、电池的模组构成参数、电池最大放电电流参数。
根据上述分析,利用AVL-Cruise 软件建立的模型,如图1所示。

图1 AVL-Cruise 建立的整车模型界面
利用AVL-Cruise 软件进行汽车性能仿真的最大特点是各子系统的模块化设计以及子模块的参数化输入非常简单,双击图1模型中的各子模块就会弹出相应的子系统参数设置界面,通过参数输入界面设置相关参数。建模和参数设置完成后,利用检查功能来确保模型数据和连接的正确性。仿真计算前要确定具体仿真任务,根据文章所要分析的性能指标,选择AVL-Cruise 软件中7种不同的计算方式,分别是循环测试、爬坡性能测试、等速行驶性能测试、全负荷加速测试、最大牵引力测试、巡航测试、制动/滑行/倒拖。依据仿真要求选择合适的计算方式[4]。对于纯电动汽车来说,由于整车控制策略的限制,不同的工况下,电机的工作特性是不一样的,特别是电机峰值功率特性受电池放电脉冲等条件限制,只能短时间工作,所以在AVL-Cruise计算中,对不同工况下的性能计算会采用不同的电机特性。对于最高车速、续驶里程,使用电机额定功率曲线;对于起步加速、超车加速、爬坡等,使用电机峰值功率曲线计算[5]。
2 AVL-Cruise 计算结果分析
把实车采集的车速数据(做了一定的滤波处理,去除了频繁的扰动)作为仿真的工况输入,车速时间历程,如图2所示。实际道路试验数据采样周期为50 ms,因此仿真过程中,仿真步长设定为0.05 s。从图2 可以看出,仿真车速能够很好地跟随实际车速的变化。

图2 纯电动汽车道路试验车速与AVL-Cruise 仿真车速对比
仿真的加速踏板开度变化幅度和变化趋势基本与实际加速踏板开度相当,如图3所示。对于混合动力汽车系统,由相似的加速踏板开度可以得到基本相同的速度时间历程,即由相似的输入得到基本一致的输出,证明了仿真模型基本上可以表现出与实车相同的特性,模型本身是正确有效的。

图3 纯电动汽车仿真与实际加速踏板开度对比
电机转矩时间历程,如图4所示。和加速踏板开度一样,仿真曲线变化幅度和变化趋势都基本与实际曲线特性相当。

图4 纯电动汽车电机转矩曲线对比
电池荷电状态(SOC)的时间历程,如图5所示。仿真和试验结果的对比情况,如表2所示,SOC变化量基本相等,说明仿真模型电池输入输出的能量与实车相等。同时,仿真曲线与实际曲线基本重合,说明在整个车辆运行过程中,仿真模型与实车瞬时状态量一致,而不仅是初始状态和最终状态的简单吻合,由此得到的仿真模型,可信度更高。

图5 纯电动汽车电池SOC变化曲线对比

表2 纯电动汽车电池SOC仿真与试验结果对比 %
完成模型搭建后即可进行模型的运算。利用AVL-Cruise 对纯电动汽车进行整车性能指标计算分析,计算结果如下:100 km 加速时间为13.76 s,最高车速为115 km/h,最大爬坡度为23.84%,续驶里程为147.761 km,电能消耗量为0.114 kW·h/km。
该结果与文章确定的整车性能指标比较一致,模型精确度较高。
采用动力性换挡规律,使整车在新欧洲行驶循环工况[6](NEDC)下进行仿真,仿真结果的时间历程,如图6和图7所示。

图6 纯电动汽车实际车速、目标车速、加速度仿真曲线图
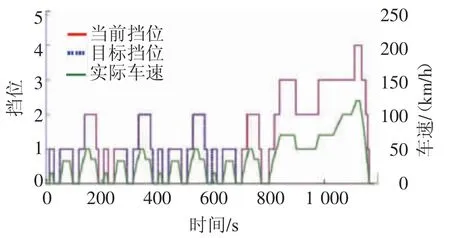
图7 纯电动汽车当前挡位、目标挡位、实际车速仿真变化曲线
仿真结果表明,实际车速能够很好地跟随目标车速变化,当前挡位也能很好地跟随目标挡位的变化。由于动力性换挡规律的换挡车速较高,换挡存在延迟,能够较大程度地发挥汽车的牵引特性,因此循环行驶工况中,整车运行挡位较低。
在完成动力总成参数选型后,利用一辆原型车改装了一辆纯电动样车,电池与文章采用的电池组类型完全相同,允许SOC放电区间为35%~75%,完成初步控制策略的标定后,进行多轮续驶里程的测试。同时进行多轮AVL-Cruise 仿真计算,验证模型计算数值与实车测试数值的误差,并再次验证该模型的精确度。验证结果,如表3所示。
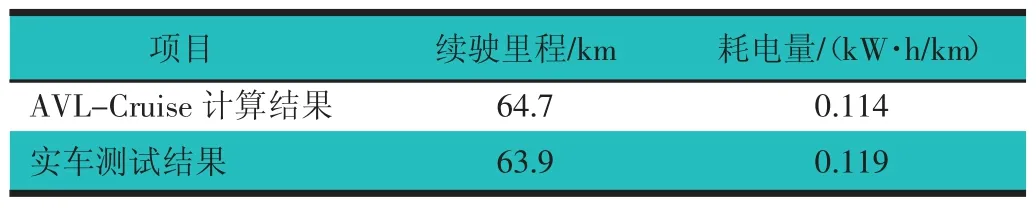
表3 纯电动汽车实车测试与模型仿真对比分析
从表3 可以看出,AVL-Cruise 计算结果与实车测试结果之间的误差小于4%,说明所建立的模型精度较高,能够预测相关性能指标并为实车性能的分析提供理论依据。
3 结论
以某款电动汽车为研究对象,利用AVL-Cruise 软件构建仿真分析模型,通过软件仿真与实车测试相结合的方法进行整车仿真性能分析,结果显示,所构建的仿真模型的动力性、经济性以及荷电状态(SOC)等性能参数与实车测试结果比较吻合,误差比较小,说明该方法是可行的。今后需进一步完善整车仿真模型中的参数设计,为实车应用创造条件。
