基于改进型自抗扰控制器的永磁同步电机的低速控制
2020-05-08段淑霞
段淑霞
(芜湖职业技术学院 电气工程学院,安徽 芜湖 241000)
永磁同步电机(PMSM)是一个多变量、强耦合、非线性、变参数的复杂对象,因其体积较小、效率高、伺服性能好及电磁转矩大等优点,被广泛应用于各种场合.因此,永磁同步电机伺服性能的好坏,直接影响着很多领域的发展.低速甚至于超低速指标是伺服系统主要的指标之一,但是电机的速度容易受到电机参数和负载扰动等不确定因素的影响.因此,采用一种先进的控制策略是电机能够稳定运行的保障.目前,电机的低速控制常采用无传感器控制[1],但是需要知道该方法的参数的精确值;也有学者采用滑膜控制策略[2],但是这种方法超调大,且只能在很小的速度范围内实现良好控制;模糊控制应用于低速控制,虽然鲁棒性好,但是很难解决抖动问题;一些国内学者采用基于卡尔曼滤波器的新型估算方法对电机的低速域进行控制,取得了良好的效果,但是其鲁棒性能需要改进[3-4];谢红普等[5]学者针对增量式编码器的平均测速法在永磁同步电机低速条件下的缺点,提出一种基于状态观测器的转子瞬时速度检测法,改善了永磁同步电机低速时的稳定性,但是在实际系统的运用中参数选取问题需要解决;自抗扰控制技术(ADRC)因其抗扰动性能强,较好的鲁棒性以及对模型的要求低,能够实现电机的低速控制,且效果令人满意.
韩京清先生于20世纪80年代提出自抗扰控制方法.自从该方法提出以来,自抗扰控制技术已得到了很大发展,并广泛的应用于工业领域.刘丙友等学者将自抗扰控制器的ESO及非线性误差反馈律进行改进,并应用于永磁同步电机的位置角控制,实现永磁同步电机的位置角的良好控制[6].王东振等人提出一种自抗扰控制器参数整定方法,经仿真证实该方法的有效性[7].方勇纯等学者将自抗扰控制技术应用于无人直升机导航,增强了无人机的抗扰动性能,提升了无人机的控制精度[8].丁美玲学者将一种改进型自抗扰控制器应用于球杆系统中,取得了很好的控制效果[9].本文运用拉格朗日动力学方程建立了永磁同步电机的数学模型,采用模糊PID控制器取代ADRC的非线性误差控制律,设计了基于改进型自抗扰的永磁同步电机低速的控制系统,并对该系统进行仿真,验证了改进型自抗扰控制器的有效性和抗干扰能力.
1 PMSM的数学模型
永磁同步电机的dq坐标系,在该坐标中电机转子以同步电角速度ω旋转,假定其空间磁场成正弦函数,且忽略磁路饱和,不计磁滞和涡流损耗影响,当PMSM转子结构为表贴式时Ld=Lq=L,在此条件下,采用id=0矢量控制策略时,得到同步坐标系下PMSM的电压方程为[10-11]:
(1)
电磁转矩方程为:
(2)
式中:id和iq分别表示电流d、q轴分量;ud和uq分别表示电压的d、q轴分量;Ld和Lq分别表示直、交轴电感;R为电机的定子绕组电阻;ωre为电机的电角速度;ψ为永磁体与定子交链磁链.
2 永磁同步电机的控制策略
为了实现永磁同步电机低速时的良好控制,本文设计提出一种由模糊PID,自抗扰控制器进行有机结合的控制器.该控制器的基本原理为:利用跟踪微分器(TD)获取永磁同步电机速度的初始值;利用扩张状态观测器提取PMSM速度实际值和系统的未知扰动[12];通过模糊PID对速度的误差进行动态控制;利用模糊规则对PID控制器的主要参数进行实时优化;利用扰动补偿环节实现PMSM低速未知扰动的精准补偿.基于模糊PID自抗扰控制器的控制结构如图1所示.
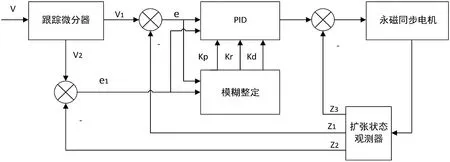
图1 模糊PID自抗扰控制器Fig.1 Fuzzy PID ADRC controller
3 改进型模糊PID自抗扰控制器设计
3.1 跟踪微分器TD
在永磁同步电机低速控制改进型模糊PID控制器中,跟踪微分器用于安排过渡过程,主要目的是解决快速响应和因响应过快而引起的超调问题,同时使信号过渡更加平稳,其算法为:
(3)
式中:V(t)为永磁同步电机输入的速度信号,h为积分步长,r为跟踪速度因子,han(V1,V2,r,h)为设计的非线性函数.它的表达式如下.
(4)
(5)
(6)
d=rh0.
(7)
d0=h0d.
(8)
y=v1-v+hv2.
(9)

图2 模糊PID控制器Fig.2 Fuzzy PID controller
3.2 模糊PID设计
模糊PID就是将模糊控制与PID控制器相结合,利用模糊规则对PID控制器的参数进行实时整定[13-14],其基本原理为:定义变量e,变化量的变化速率ec,还有参数整定过程中的ΔKP,ΔKD,ΔKI.本文模糊设计PID控制器为二维模糊控制器,e为给定偏差值和ec为输入的偏差变化;模糊PID控制器的输出为ΔKP、ΔKD、ΔKI三个参数,模糊PID的流程图见图2.
本文设计的模糊PID控制器,设置了NB、NM、NS、ZO、PS、PM、PB七个变量.划定的输入输出变量为:e,ec论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};ΔKP,ΔKD,ΔKI论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}.模糊PID控制器参数的整定算法为:
KP(k)=KP0+ΔKP(k),KI(k)=KI0+ΔKI(k),KD(k)=KD0+ΔKD(k).
其中KP0、KI0、KD0为PID控制器设置的初始参数.图3、图4为设置的输入输出的隶属度函数.

图3 输入变量隶属度函 图4 输出变量隶属度函数Fig.3 Membership function of input variables Fig.4 Membership function of output variables
3.3 ESO设计
扩张状态观测器(ESO)用来观测系统内部状态和估计系统的未知状态,实现对外部位置干扰的补偿.扩张状态观测器(ESO)形式如下.
(10)
(11)
其中:ε1为观测误差;Z21为输入信号θ的跟踪信号;Z22为输入信号θ的微分信号;Z23为系统总扰动的观测信号;u为控制输出;β11、β12、β13是ESO的增益;α1、α2、α3为非线性因子.
4 仿真结果及分析
4.1 参数的选取
为了验证基于模糊PID的自抗扰控制策略的性能,采用Simulink搭建基于模糊PID的自抗扰仿真模型,得到该控制策略的仿真波形.

表1 改进型ADRC参数Tab.1 Improved ADRC parameters
1)跟踪微分器.不用考虑滤波所以可以选取h=h0,这样跟踪微分器中需要整定的参数就是仿真步长h和跟踪因子r.h会对输出信号的跟踪精度产生影响.r的大小会对输出信号的过渡过程和跟踪精度的时间产生影响,r越小输出信号的过渡时间越长.所以一般跟踪微分器参数选为:r=10,h=h0=0.02.
2)扩张状态观测器的参数.带宽δ的选取也应该遵循这样的规则,选取的数值较大时会导致非线性方程的优势丢失,如果选择的数值过小,会导致整体系统变得不稳定.因此选取0.01是比较合适的.非线性因子一般满足α1>α2>α3,通常取经验值0.5、0.25、0.125.增益数值的选取一般需要x满足如下公式:
ω0越大扩张状态观测器可以跟踪的误差扰动幅值越小,另外适当增大β13,虽然优化的性能会变好,但是很容易造成总扰动估计值的超调,并会造成控制量的震荡,因此分别取60、1 200、8 000.
3)新型ADRC控制策略与传统的ADRC控制策略均采用如表1参数进行仿真对比.
4.2 仿真结果
图5为基于本文提出方法的仿真结果,图5(a)为给定速度为100 r/min,电机空载启动时的转速响应曲线,响应时间为0.075 6 s;同理,图5(b)、图5(c)和图5(d)分别为给定速度为200、400、600 r/min电机空载启动时的转速响应曲线,响应时间分别为0.082 6、0.088 7、0.095 8 s.可以看出本文所提的方法在电机的低速控制时过度平滑,几乎没有超调.

(a)转速为100 r/min (b)转速为200 r/min

(a)转速为400 r/min (b)转速为600 r/min图5 电机空载转速响应曲线Fig.5 Response curve of speed with no-load start of motor
为了验证本文设计控制策略在电机有负载情况下的性能,电机给定速度为300 r/min,本文进行所设计控制策略和传统自抗扰控制策略对比仿真.初始时刻负载转矩TL=0 N·m,在t=0.2 s时负载转矩TL=2 N·m,仿真结果如图6、图7、图8所示.由图6(a)可以看出在电机0.2 s搭载2 N·m转矩负载时,模糊PID的自抗扰控制策略几乎没有受负载的影响,而传统自抗扰控制策略运行速度略低于给定速度并稳定运行.图6(b)是给定电机速度100 r/min,初始时刻负载转矩TL=0 N·m,在t=0.2 s时负载转矩TL=2 N·m的仿真图,由图6(b)可以看出,在t=0.2 s时负载转矩TL=2 N·m,电机转速几乎不发生变化.图7、图8分别是在电机系统搭载负载前后转矩以及电流的变化,由图6、图7、图8可以看出,模糊PID的自抗扰控制策略比传统自抗扰控制控制策略有更好的控制性能.

(a)转速为300 r/min (b)转速为100 r/min图6 电机突加扰动时的响应曲线Fig.6 Response curve of speed with sudden disturbance of motor

图7 电机突加负载转矩响应曲线 图8 电机突加负载转矩电流的响应曲线Fig.7 Torque response curve under sudden load of motor Fig.8 Response curve of torque current under sudden load of motor
5 结语
本文设计了一种基于模糊PID的改进型自抗扰控制器.该控制器由跟踪微分器(TD)、模糊PID、扩张状态观测器(ESO)等部分组成.其中跟踪微分器(TD)的功能是安排输入信号的过渡过程,模糊PID取代非线性状态误差反馈控制律(NLSEF)对系统的误差进行计算并且实时控制,扩张状态观测器(ESO)的功能是估计系统的总扰动.为了验证该控制策略控制永磁同步电机的低速控制的有效性,将该控制策略与传统的自抗扰控制策略进行仿真对比.结果表明该控制策略优于传统的自抗扰控制策略,具有较强的鲁棒性和抗干扰能力.
