基于自由自航模回转试验的不确定度分析
2020-05-08孙子翰陈伟民吴梓鑫
孙子翰, 陈伟民, 吴梓鑫, 许 贺
(上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135)
0 引 言
自由自航模操纵性试验不可避免地会受到多种因素的干扰,试验结果通常是在考虑多种影响因素之后得到的。随着国际拖曳水池会议(International Towing Tank Conference,ITTC)和国际海事组织(International Maritime Organization,IMO)对船舶操纵性问题日益重视,水动力数值分析处理能力不断提高,船模试验技术不断进步,以及美国国家标准学会(American National Standards Institute,ANSI)、国际计量局(International Bureau of Weights and Measures,BIPM)、美国机械工程师协会(American Society of Mechanical Engineers,ASME)和国际标准化组织(International Organization for Standardization,ISO)陆续制定不确定度标准,船舶操纵性试验的不确定度问题越来越受人们的关注。
根据ITTC在2014年推荐的自航模操纵性试验不确定度分析[1],回转试验是评价船舶的操纵性和机动性是否优良的重要方式,对回转试验进行不确定度分析,能以量化的方式表征出试验内容和数据结果的可信性度[2],具有较高的科研意义。
本文以某4 m长的船模为研究对象,通过8次重复回转试验,结合船模相关参数、水文和设备精度等影响因素,对船模回转试验的不确定度进行分析,为工程应用提供参考。
1 不确定度
“不确定度”是一种法定计量术语,虽然BIPM已给出定义,但目前仍存在一定的争议。按照一般的解释,不确定度定义的是测量值的“分散性”内涵。但是,现在越来越多的科研工作者认为“不确定度”是指“误差的不确定度”或“真值的不确定度”,而非“测量结果的不确定度”,继而认为原有的定义并不准确[3]。为避免产生歧义,本文研究的不确定度定义为“测量不确定度”,即对测量结果的分散性进行量化描述的一个参考量[4-6]。测量误差与测量不确定度的关系见表1。
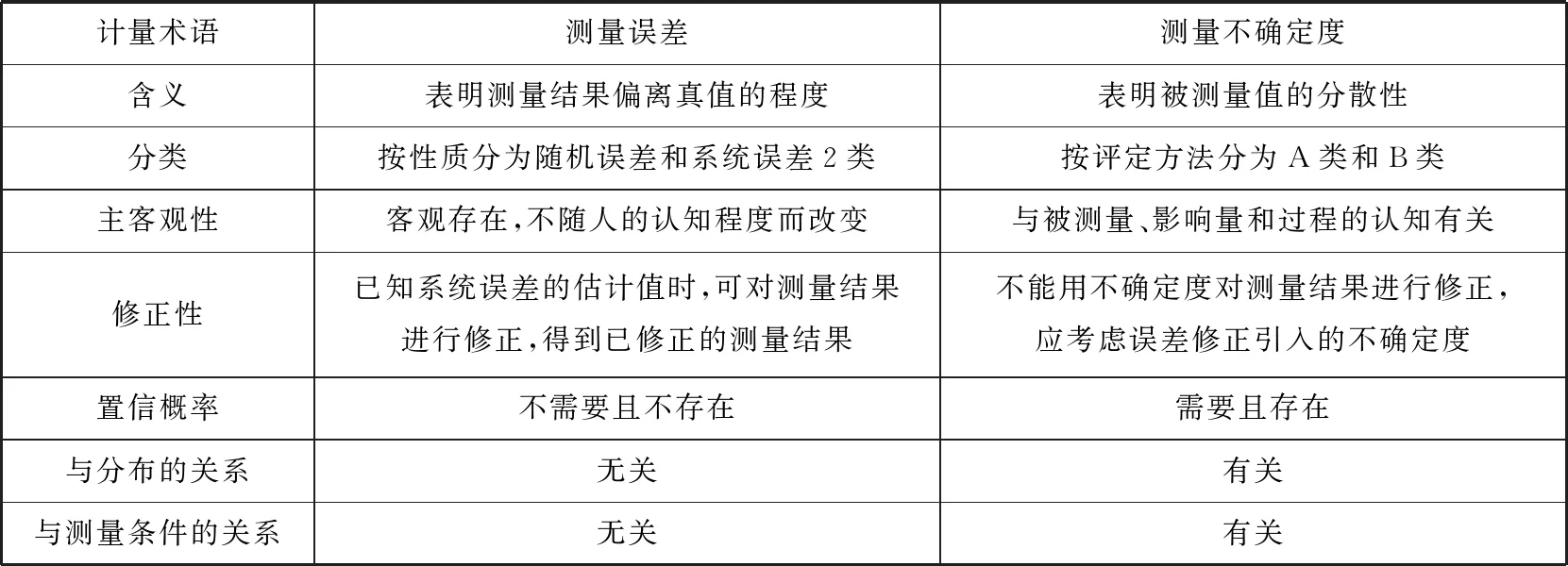
表1 测量误差与测量不确定度的关系
在试验数据测定中,总会存在误差δ,该误差由随机产生的精度误差ε和因系统性问题而产生的偏差β组成。对精度误差ε进行不确定度估算得到的结果称为精度限P,对偏差β进行不确定度估算得到的结果称为偏差限B。
在测量不确定度时,将其划分为A和B两类,其中:A类评定由统计数据得出;B类评定与试验仪器和方法步骤有关。因此,对B类不确定度进行分析有利于提高试验数据的品质[2]。
在变量的测量值中,独立的变量Xi会通过数据的处理方程r=(X1,X2,…,Xn)传递(见图1),最后影响试验数据的处理结果。由测量误差δXi导致的误差δr可通过r(Xi)对泰勒级数进行展开近似得到。测量误差与变量Xi的导数dr/dXi即为灵敏度系数θ[7]。
2 自航模回转试验
船舶回转试验体现船舶的回转性能和运动所需水域的大小,与船舶在狭窄水道或受限区域安全地回转规避和在紧急情况下制动与避让等密切相关。船模回转试验通过实现船模与目标实船几何相似、重量相似和惯量相似,采用安装有几何相似桨和舵的模型,以无线遥控的方式控制电机、舵机和仪器等设备进行回转试验。直线航行的船模通过改变舵角并保持一定的舵角来做回转运动,经过一段时间之后进入稳定状态,即定常运动状态。当船模处于定常运动状态时,可开展理论分析和数据研究[8]。试验选用的船模的主要参数见表2。

图1 不确定度传递

表2 船模主要参数
试验采用的船模由五轴的船模切削机加工制造而成,加工过程由成套的集成电脑数控设备负责,木制船模粗胚体制造完成之后进行精加工,如对木制船模的边缘毛刺进行休整,随后对船模涂刷油漆。试验船模见图2。

a) 侧视图

b) 后视图
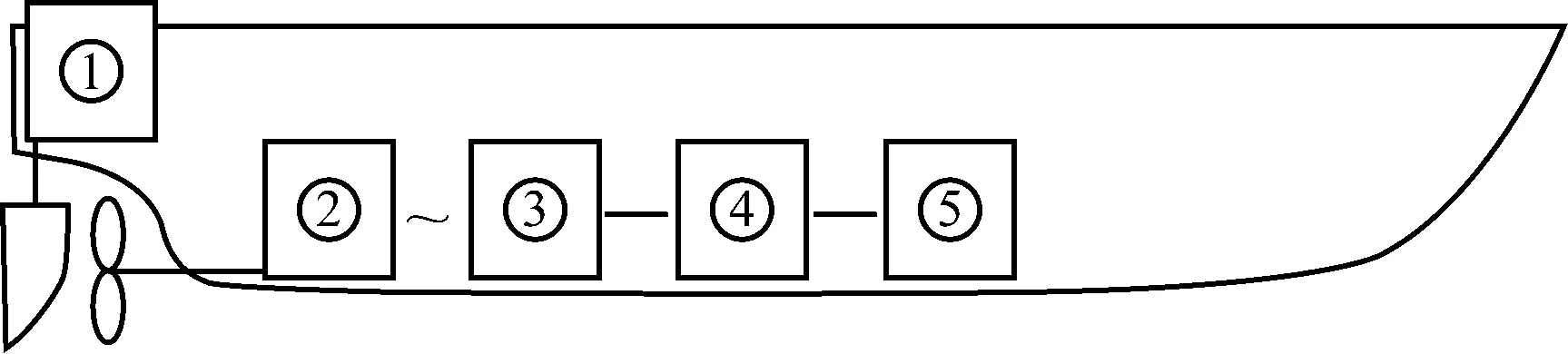
注:①为舵机;②为直流电机;③为驱动电机;④为直流电源;⑤为船模控制器(嵌入式计算机、单片机、姿态传感器、电平转换电路板和串口扩展等)
图3 装船主要试验设备布置示意
试验设备采用模块化的形式封装,主要包括船模舵机控制器、船模操纵控制器、陀螺仪、船模陀螺控制器、船模主电控制器、无线控制器、电机和电源。设备布置与船模压载状态调整同时进行,装船主要试验设备布置示意见图3。
3 回转试验不确定度分析
影响回转试验的因素众多,且内在联系复杂,本文主要考虑船模和螺旋桨的几何影响和试验测定数据的影响。船模几何影响因素包括船长L、船宽B、吃水T、重心高度ZG和初稳心高h等;螺旋桨几何影响因素包括半径R和螺距P;试验测定数据包括初速度v0、舵角r0和操舵时间t等。计算采用的试验数据均已经过粗大误差的筛选处理。
试验船模由高精度的船模切削机加工制作,根据经验和制造仪器的精度,结合已有的试验经验,船模的船长、船宽和吃水的不确定度分别为0.002 m、0.001 m和0.001 m;船模的重心高度和初稳心高的不确定度均控制在0.001 m。螺旋桨模型采用五轴联动数控机床加工制造,舵模型采用打印设备制造,根据提供的数据,其不确定度为0.000 01 m。试验水池中水的密度ρ受其温度的影响,依照ITTC有关淡水的规范公式,有
ρ(T)=999.784+0.063 8T-0.008 65T2+0.000 063 1T3
(1)
(2)
(3)

(4)
(5)

表3 Fr的不确定度

(6)
(7)
[BD]2=[θvc·Bvc]2+[θrc·Brc]2
(8)
经过计算,分别取左回转偏差限BDL和右回转偏差限BDR的平均值,有左回转直径偏差限BDL=0.299,右回转直径偏差限BDR=0.419(见表4)。
根据ITTC推荐的计算公式计算回转直径的精度限PD,有
(9)
(10)
(11)


表4 回转直径的偏差限BD

表5 回转试验数据
4 结 语
本文对船模回转试验的不确定度进行了初步分析,结果表明:
1) 对于自航模回转试验而言,其不确定度的来源较为复杂,通过对船模、设备和数据采集仪器等试验因素进行跟踪,采用ITTC规程进行不确定度分析,能较好地计算出回转试验的影响因素及其影响大小,本文对主要影响因素进行了分析,试验所得数据可信。
2) 根据不确定度计算结果,在95%置信区间下取K=2,回转直径D的不确定度在5%以内,试验结果较好。由于此次试验研究的船舶为单桨右旋型船舶,受艉流的影响,在右转舵时,在螺旋桨侧向压力的作用下,单桨右旋螺旋桨船的回转圈与其左转舵的回转圈相比较大,导致左右回转直径的不确定度存在差异,左回转直径的不确定度为4.2%,右回转直径的不确定度为4.9%。
3) 此次不确定度研究以量化的方式检验了回转试验水池所得数据的可靠性和试验操作步骤的规范程度,有利于后续有针对性地提高数据的可信度。虽然试验只重复进行了8次,但从反映出的结果来看,可得到相关的变化趋势,为后续试验提供参考。
