半潜式支持平台靠泊海洋生产平台碰撞概率建模
2020-05-08王炫凯姜河蓉
王炫凯, 姜河蓉
(上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135)
0 引 言
随着世界经济的快速发展,各国的海洋工程事业不断壮大,很多国家都已将海洋能源开采从近海转向远海,在此情况下,钻井平台和生活支持平台等平台的应用越来越广泛。大型海上生产平台通常需通过深水半潜式支持平台靠泊来满足各种需求,在海上长期作业过程中,受各种不确定因素的影响,与浮式生产储卸油装置(Floating Production Storage and Offcoading,FPSO)在海面上作业时不可避免地遭受穿梭油船的碰撞情况相似[1],会出现无法避免的碰撞问题。当生产平台在不确定因素更多的深海作业时,发生碰撞等事故的可能性会更大。
碰撞风险评估的重点是对碰撞频率进行统计分析,当船舶因外界干扰而偏离航道驶向平台,或因失去控制而处于漂移状态并撞向平台时,造成的危害是巨大的。本文对深水半潜式支持平台靠泊海洋生产平台的碰撞场景进行解析,通过分析引发碰撞事故的原因,建立碰撞概率模型,为评估靠泊碰撞风险提供参考。
1 靠泊碰撞场景
深水半潜式支持平台在靠泊海洋生产平台时,通常通过连接栈桥与海洋生产平台搭接。图1为支持平台靠泊海洋生产平台实景图;图2为支持平台靠泊海洋生产平台路径图。图2中:在距离靠泊目标2 n mile的E点,支持平台的速度小于2 kn,已做好靠泊准备;在距离靠泊目标1 000 m的D点,支持平台的速度小于1 kn;在距离靠泊目标500 m的C点,支持平台的速度小于0.5 kn,该点是其靠泊目标平台的路径调整点;在距离靠泊目标100 m的B点,两平台的靠泊点对准,支持平台向目标平台移动,速度小于0.05 m/s;A点是支持平台与目标平台距离最近的点(约为38 m),根据操船师的经验,各方向和角度的靠泊搭接都有可能出现。

图1 支持平台靠泊海洋生产平台实景图
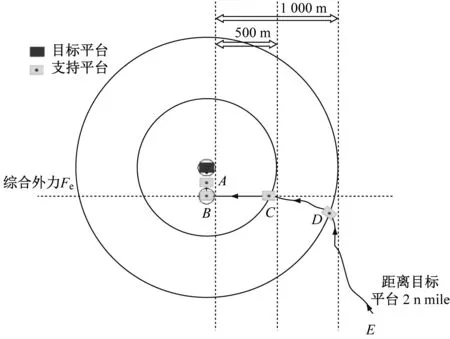
图2 支持平台靠泊海洋生产平台路径图
由此可见,两平台相距100 m时的靠泊接近阶段是可能发生碰撞的起始点,随后的靠泊连接和断开阶段存在的危险源包括人员操作失误、空气能见度低、风浪大、动力定位系统失效、控制系统失效和技术故障等,最终可能导致支持平台因向前偏移过大而与海洋生产平台发生碰撞。
2 现有碰撞概率模型
目前国内外应用较多的2种碰撞概率模型是挪威船级社(Det Norske Veritas,DNV)DNV-RP-107规范中的船与海洋平台碰撞概率模型和美国公路与运输协会(American Association of State Highway and Transportation Officials,AASHTO)《美国公路桥梁防船撞设计指南》中的船桥碰撞概率模型,比较分析这2种概率模型,以此为基础,建立支持平台靠泊海洋生产平台碰撞概率模型。
2.1 2种碰撞概率模型
据统计,在海洋平台碰撞事故中,频繁靠泊的供给船是主要风险源,由其引发中大型事故的概率较高[2],因此主要关注供给船的碰撞概率。
1) DNV在DNV-RP-107规范中给出的船舶与海洋平台碰撞概率模型公式[3]为
PCP=N·P1·P2·P3
(1)
式(1)中:N为每年过往船舶的数量(目标平台附近航道);P1为碰撞航线的概率,即几何概率(朝向平台行驶的概率);P2为碰撞船舶初始矫正失败的概率;P3为被撞平台初始矫正失败的概率。P1包含所有与交通流量的构成和位置相关的参数,船舶在航线上的位置符合正态分布。
2) 《美国公路桥梁防船撞设计指南》规定的船桥碰撞概率模型公式[4]为
Pcb=N·PA·PG
(2)
式(2)中:N为通航船舶数量(目标桥梁下的航道);PG为几何概率;PA为偏航概率,即船舶出现在碰撞路线上的概率。PA=BR×RB×RC×RXC×RD,其中BR、RB、RC、RXC和RD分别为偏航基准概率、桥位修正系数、平行水流修正系数、横流修正系数和船舶交通密度修正系数。对于PG,采用正态分布来模拟船舶的分布,考虑桥位、水流和交通密度。
2.2 综合比较分析
1) DNV规范中给出的船与海洋平台碰撞概率模型对碰撞船舶进行了分类,同时对漂移船舶碰撞概率和有动力船舶碰撞频率进行了计算。对于船舶出现在碰撞路线上的概率,用几何概率P1来表示该概率模型。
2) AASHTO给出的船桥碰撞概率模型考虑的更为细致全面,该模型用偏航概率PA表示船舶出现在碰撞路线上的概率。偏航概率PA的计算更为复杂,从碰撞发生的根源入手,考虑各种因素对偏航碰撞的影响;对于PG,采用正态分布模拟船舶的分布,考虑桥位、水流和交通密度。虽然这些因素的影响难以定量描述,需借助事故记录进行统计,但考虑这些因素会使计算得到的概率更加准确,这也是该模型具有较高认可度并广泛应用的原因。
3 靠泊碰撞概率模型建立
3.1 碰撞原因
根据碰撞事故分析经验和专家的评价结果,对影响碰撞概率的主要因素进行评估。由风险影响因素组合排序可知,技术和人为/操作可靠性被视为最重要的影响因素。对于支持平台靠泊海洋生产平台过程中可能发生的碰撞,主要按支持平台的失控状态分为平台自身失去动力控制产生漂移碰撞和人为操作失误使平台产生动力碰撞2种。
1) 漂移碰撞的诱因主要分为人为操作失误和动力装置失效2种。通过对靠泊模式进行分析可知,当两平台相距100 m以内时,支持平台的速度非常低(约为0.05 m/s),产生的碰撞动能一般不到0.1 MJ,碰撞能量较小,即使发生碰撞,也属于极小能量的碰撞,因此需叠加环境因素的影响,增加风、浪、流概率组合同向诱导因素,其中风是主要诱因,因此主要采用风由支持平台吹向海洋生产平台的概率来反映该影响。
2) 动力碰撞的主要诱因是人为操作失误引起的支持平台向前过度偏移。在这种情况下,一般来不及采取应急措施,支持平台作为碰撞方,在30~40 m距离内纠错成功的概率非常低,环境载荷的不利情况更会增大碰撞的可能性,提高碰撞的严重程度。
3.2 漂移碰撞概率模型
基于以下3种假设建立支持平台漂移性碰撞海洋生产平台的概率模型:
1) 支持平台的动力装置失效,概率一般为2×e-5;
2) 风由支持平台吹向海洋生产平台;
3) 在支持平台靠泊海洋生产平台过程中,两者之间的距离很近,当支持平台因动力装置失效而漂向海洋生产平台时,操作人员没有意识到该问题或来不及反应。
DNV关于漂移碰撞的概率模型没有考虑应急措施等因素,若附近守护船或被撞平台有采取矫正措施,则碰撞概率会很小。操作人员失误造成支持平台处于失控状态也是引起漂移碰撞的重要原因。因此,建立漂移碰撞概率公式为
Pp=N×(Ps+Ppi)×Pw×PG×Pc
(3)
式(3)中:Pp为支持平台与海洋生产平台发生漂移碰撞的概率;N为每年平台靠泊作业的次数;Ps为支持平台动力定位装置失效的概率;Ppi为操作人员失误造成支持平台处于失控状态的概率;Pw为风由支持平台吹向海洋生产平台的概率;PG为几何概率,包含所有与靠泊连接的构成和位置相关的参数;Pc为被撞平台初始矫正失败的概率。
漂移碰撞概率模型主要考虑支持平台靠泊期间,由于动力定位失效和操作人员失误,在不利的风、浪、流海况条件下,漂移撞向海洋生产平台的概率。
3.3 动力碰撞概率模型
基于以下3种假设建立支持平台动力性碰撞海洋生产平台的概率模型:
1) 支持平台的动力装置良好;
2) 人员操作失误致使支持平台处于失控状态或产生向前的过度偏移;
3) 海洋生产平台没能及时警告支持平台,在支持平台靠泊海洋生产平台过程中,两者之间的距离很近。
支持平台偏离工作位置,移向海洋生产平台,操作人员没有意识到该问题,辅助船舶来不及采取应对措施。因此,建立动力碰撞概率公式为
PD=N×Ppf×Pe×Pg×Pc
(4)
式(4)中:PD为支持平台与海洋生产平台发生动力碰撞的概率;Ppf为操作人员失误造成支持平台前移的概率;Pe为风、浪、流不利组合海况出现的概率;Pg为几何概率,与平台的尺寸、相对位置和栈桥连接情况有关;Pc为被撞平台初始矫正失败的概率,即海洋生产平台没能及时采取措施阻止碰撞发生的概率。当人为操作失误使支持平台产生向前的过度偏移时,对于Ppi和Ppf的取值,需根据历史事故资料统计一个基本概率,该概率应比动力装置失效的概率稍大,可参考支持平台动力装置失效的概率值。
式(3)和式(4)中的Pw和Pe为环境影响因子,需结合海域环境和历史事故资料统计一个基本概率值。
3.4 靠泊碰撞事件树
在建立上述概率模型时,可为支持平台靠泊碰撞海洋生产平台事故建立事件树(见图3)。事件树从引起碰撞的原因出发,通过2个分支详细描述平台发生漂移碰撞和动力碰撞的过程,碰撞场景出现的概率是各过程发生概率的乘积,整个过程代表的碰撞情形的发生概率可表示为
Pcollide=Pp+PD
(5)
因此,求解碰撞场景出现的概率即是求解发生漂移碰撞的概率和发生动力碰撞的概率。

图3 支持平台靠泊碰撞事件树
3.5 结合实例计算
以某型深水半潜式支持平台为例进行实例分析,目标海域为挪威北海海域。支持平台和海洋生产平台的主尺度见表1。在前述公式中:Ppi和Ppf的取值比动力装置失效的概率值稍大,在2×e-5左右;Pw和Pe为环境影响因子,对于支持平台发生偏移的方向,理论上在平面的360°方向内存在无数种可能,但关于支持平台碰撞事故的数据较少,可认为各方向发生偏移的概率相等,故基本发生概率Pw=1/360。每个场景在发生偏移之后的条件概率为0.005,对应每个碰撞场景,需结合平台结构之间的具体几何位置关系(见图4)进行分析,发生碰撞的角度在0°~23°,几何概率PG=0.115。参考桥梁概率模型,几何概率的取值范围为0.1~1.0。每年平台靠泊作业的次数较少(在8次左右),因此采用以上公式计算得到的碰撞概率约为1×10-6。虽然每年平台靠泊作业的次数较少,但一旦靠泊连接的时间较长,深海多变、恶劣的海况会增大事故发生的概率,因此需积累事故资料,在计算公式中加入靠泊时间影响因子。
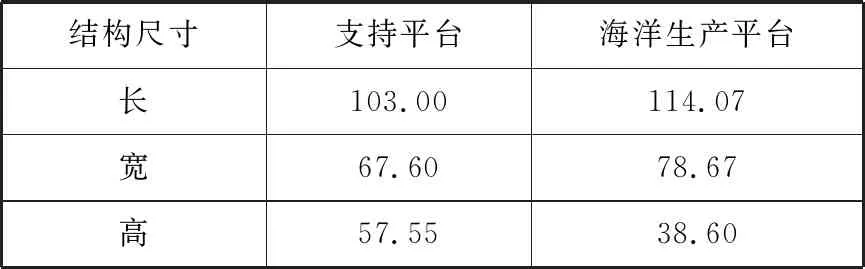
表1 支持平台和海洋生产平台的主尺度单位:m

图4 支持平台靠泊海洋生产平台几何位置关系
4 结 语
本文基于深水半潜式支持平台靠泊碰撞海洋生产平台场景建立了支持平台靠泊海洋生产平台碰撞概率模型,并结合实例讨论了模型的适用性。通过对造成碰撞事故的原因进行分析可知,提高人因可靠性,加强靠泊时对海域环境的监控,可有效预防碰撞事故的发生。
