颈椎治疗仪按摩机构设计及关键部件分析
2020-05-07陆采连张洪军莫德云弓满锋郑剑鑫
陆采连, 张洪军,2, 莫德云,2, 弓满锋,2, 郑剑鑫
(1.岭南师范学院 机电工程学院, 广东 湛江 524048; 2.粤西机电产品设计与制造工程技术研究中心, 广东 湛江 524048 )
0 引言
近年来,随着生活节奏加快,长时间伏案工作以及使用电脑、驾车、用高枕等诸多因素,都使人长时间保持单一姿势,导致颈部肌肉韧带疲劳,从而加速了颈椎病的发生[1]。 非手术治疗颈椎病方法主要有手法治疗和医疗器械辅助康复治疗[2]。 研究表明,临床采用手法按摩推拿疗法和旋提手法对颈椎病灶部位进行推、揉、挤、压、滚、上弯牵拉、下弯复位、回蹾震荡等动作,对治疗神经根型颈椎病具有显著的疗效,根据颈椎生理和病理特点,按照周期性加减载规律对颈椎进行牵引能够取得更好的治疗效果[3,4]。 仿手法治疗按摩仪是目前广泛采用的临床和家庭应用的康复治疗器械,按摩机构是核心机构,对治疗效果起到至关重要的作用[5]。
1 按摩机构结构及工作原理
按摩机构的结构组成如图1 所示, 定位轴从滚轮里孔穿入连接偏心支架上的五个小孔,由螺栓紧固,其中心花健孔从花键轴的一端穿入, 另一个偏心支架上的中心花键孔,轴向自由度由花键轴的台间限定,半圆卡环与偏心轮的沟槽连接,装入按摩手轮的里孔,在与压盖里孔连接螺栓固定合为一体,将整体的按摩手轮、软弹簧、花键垫、对向从花键轴两端穿入,两端锁定,大齿型轮、轴承、轴承座依次穿入后,整体插入摇摆装置底座上的槽中,实现按摩动作。
工作原理:当偏心支架处于初始状态时,患者的颈椎进入规定位置。 开机后, 偏心支架逆时针从0°转至90°时,人头部被偏心支架上的滚轮抬起,此时的颈椎节被逐个上升的滚轮向前推动,实现推动点形成圆周力的效果,故有对顽椎节产生了拉伸作用的同时,对向按摩手轮,同步向颈椎两侧进行进退、旋压、以8 字轨迹的曲线运行,实现了人工按摩时的标准动作,推揉、挤压的治疗效果。当偏心支架逆时针转至大于90°时, 此时的对向手轮,对人体颈椎部位两侧进行的推揉、 挤压动作开始减压分开运行。当偏心支架继续逆时针转至180°的极限时,人的头部被偏心支架上的滚轮抬起到极限, 此时的颈椎节被逐个上升的滚轮向前推动到顶峰, 实现了推动点圆周力的极限效果, 故对顽椎节实现了全骨节的拉伸和向前弯曲的作用。此时的对向手轮,对人体颈椎部位的两侧进行的推揉挤压动作切底分开。当偏心支架逆时针转270°时,人的头部被偏心支架上的滚轮抬起到极限快速下降至枕垫上, 此时的颈椎节达到向后弯曲和对颈椎节的轴向挤压的效果。 此时的按摩手轮开始对人体颈椎部位的两侧进行推揉挤压动作的循环。
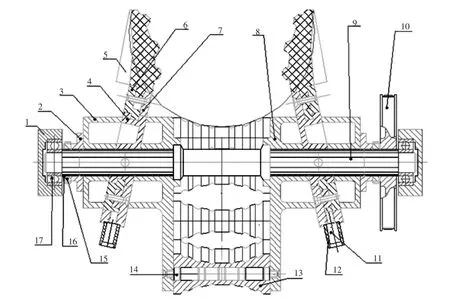
图1 按摩机构结构图Fig.1 Massage mechanism structure
采用NX 软件对颈椎治疗仪按摩机构进行了虚拟装配,如图2 所示,零部件配合良好,无干涉。 运动仿真动作合理,偏心手轮符合8 字形运动轨迹,偏心轮与按摩手轮转动角度符合设计要求。
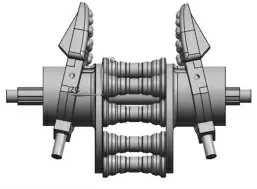
图2 按摩机构三维模型图Fig.2 3D model of massage mechanism
2 主要部件有限元分析
采用NX Nastran 高级仿真模块对按摩机构传动轴和偏心手轮定位轴进行了有限元分析,按照头部和颈部质量10Kg,同时考虑花键轴上零部件的自重,约束为平移和旋转共同作用,设定负载为300N。 网格划分采用四面体网络,自动划分网格,材料为45 号钢。 分析结果如图3~6。

图3 花键轴工作状态的应力云图Fig.3 Stress nephogram of spline shaft in working state

图4 花键轴工作状态的位移云图Fig.4 Displacement nephogram of spline shaft in working state

图5 定位轴工作状态的位移云图Fig.5 Displacement nephogram of positioning axis in working state

图6 定位轴工作状态的应力云图Fig.6 Stress nephogram of working state of positioning axis
从图3 中数据可知, 花键轴在工作过程中最大应力为2.799MPa,45 钢应力范围为25~45MPa,满足传动轴的强度要求。
从图4 中数据可知, 花键轴在工作过程中最大位移为1.863×10-3mm,选择材料满足刚度要求。
从图5 中数据可知, 定位轴在工作过程中最大位移为6.66×10-3mm,满足刚度需求。
从图6 中数据可知, 定位轴在工作过程中最大应力为2.384MPa,满足强度要求。
3 结束语
针对颈椎按摩椅仿手法治疗的动作, 设计了一种由花键轴传动,按摩手轮结合偏心轮组合式按摩机构。具有体积小,重量轻,结构紧凑,可靠性高,成本低等优点。 采用NX 软件进行了按摩机构的虚拟装配和运动学分析,结构紧凑,无干涉,运动仿真结果符合设计的运动轨迹。通过有限元分析方法对传动机构的关键部件花键轴和偏心轮定位轴进行了强度和刚度分析, 确保产品符合技术要求。
