两种不同基础的漂浮式风机载荷对比分析
2020-05-07陈明亮吴俊辉徐洋洋赖晶晶
陈明亮,吴俊辉,徐洋洋,赖晶晶
(华锐风电科技(集团)股份有限公司,北京 100872)
与陆上风电场开发相比,深远海具有范围更广、风能资源更丰富、风速更稳定、风速更高的优点,且不会与海上渔场、航线等发生冲突,对人类生产、生活的环境影响较小,发展海上风电具有得天独厚的优势,必将成为未来全球风电开发的重要方向。全球80%的海上风资源位于水深超过60 m的海域,这对固定式基础风机是巨大的挑战。目前,世界上建成的海上风电场绝大多数为近海风电场,相对于传统的海床固定式海上风电机组,漂浮式海上风电机组可以安装到具有强风的远洋深处,因此风能利用大幅提升[1]。
2009年挪威石油公司在挪威海岸附近的北海220 m水深环境中试运行第一台漂浮式机组Hywind;2017年第一个海上风电场Hywindii在英国诞生,实现了浮式风机商业化的突破,漂浮式风机早已走出概念设计和实验室研究的阶段,出现了各式各样的型式,漂浮式风电场示范项目近几年也不断涌现。随着海漂浮式技术的快速成熟,漂浮式海上风电将很快实现大规模商业化,表1为已经建设和即将要建设部分漂浮式风电场项目。
海上风电机组设计开发是一项比较复杂的工程,尤其是漂浮式风电机组,涉及到风浪流复杂恶劣的环境,对技术的要求较高[2-3]。载荷计算是海上风电机组开发首先要解决问题,准确的载荷计算对评估结构的安全性非常重要。
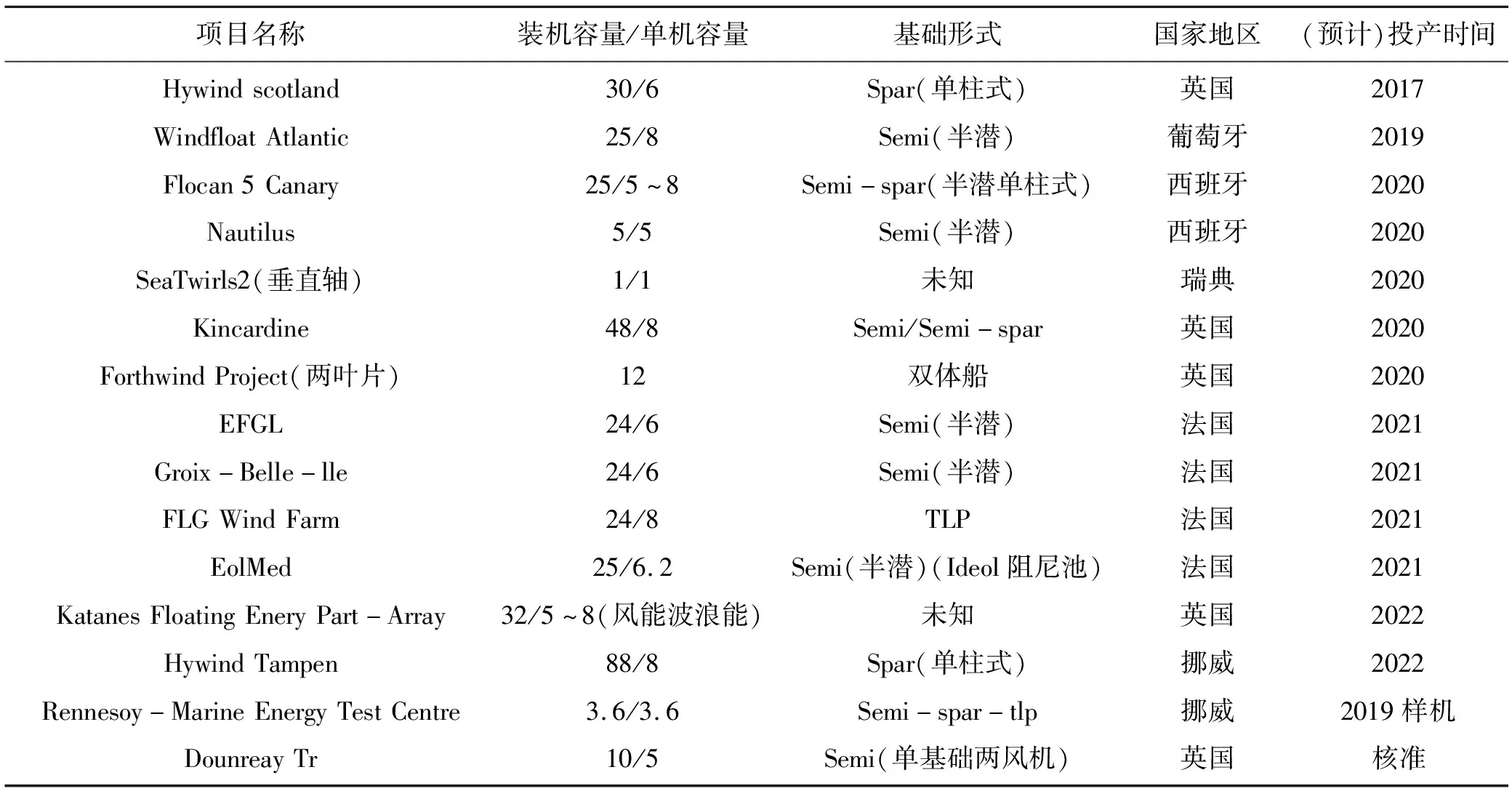
表1 部分已经和即将投产风电场项目表 MW
1 计算原理与方法
漂浮式风力机是复杂的气动—弹性—波浪—海流—系泊相互作用的多柔体系统,图1为漂浮式风机在复杂环境条件下的系统响应示意图。在流体自由表面上,该系统在自身浮力、重力及系泊力作用下处于平衡状态,系统的各种扰动(风—波—流)都具有非定常、强非线性的特点[4-5]。其力学机理相当复杂,物理上属于具有自由表面流体与柔性体的耦合问题[6]。现在常用的漂浮式风机载荷计算软件通常用时域非线性计算方法。
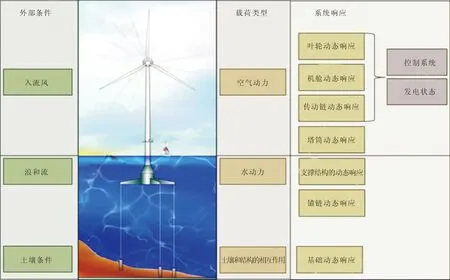
图1 风机外部环境下系统响应图
1.1 气动计算原理
常用风力发电机载荷计算软件空气动力学模型的核心是叶素和动量理论的组合。
叶素动量理论是将风轮叶片分成许多的叶素,每一个叶素扫略形成一系列圆环,如图2,并且假定每一个圆环都是独立起作用,在每一个径向位置上轴向和角动量的变化率与每一个叶片元素所产生的推力和转矩相等。

图2 叶素理论示意图
半径为r处长度为dr的叶素所产生的推力dT为:
(1)
其中W是叶素的视在风速(考虑诱导风速的实际作用风速)向量的模,如图3;φ是入射角,是指相对于叶片旋转平面的视在风速矢量的方向;c是叶素的弦长;CL和CD分别是升力系数和阻力系数。
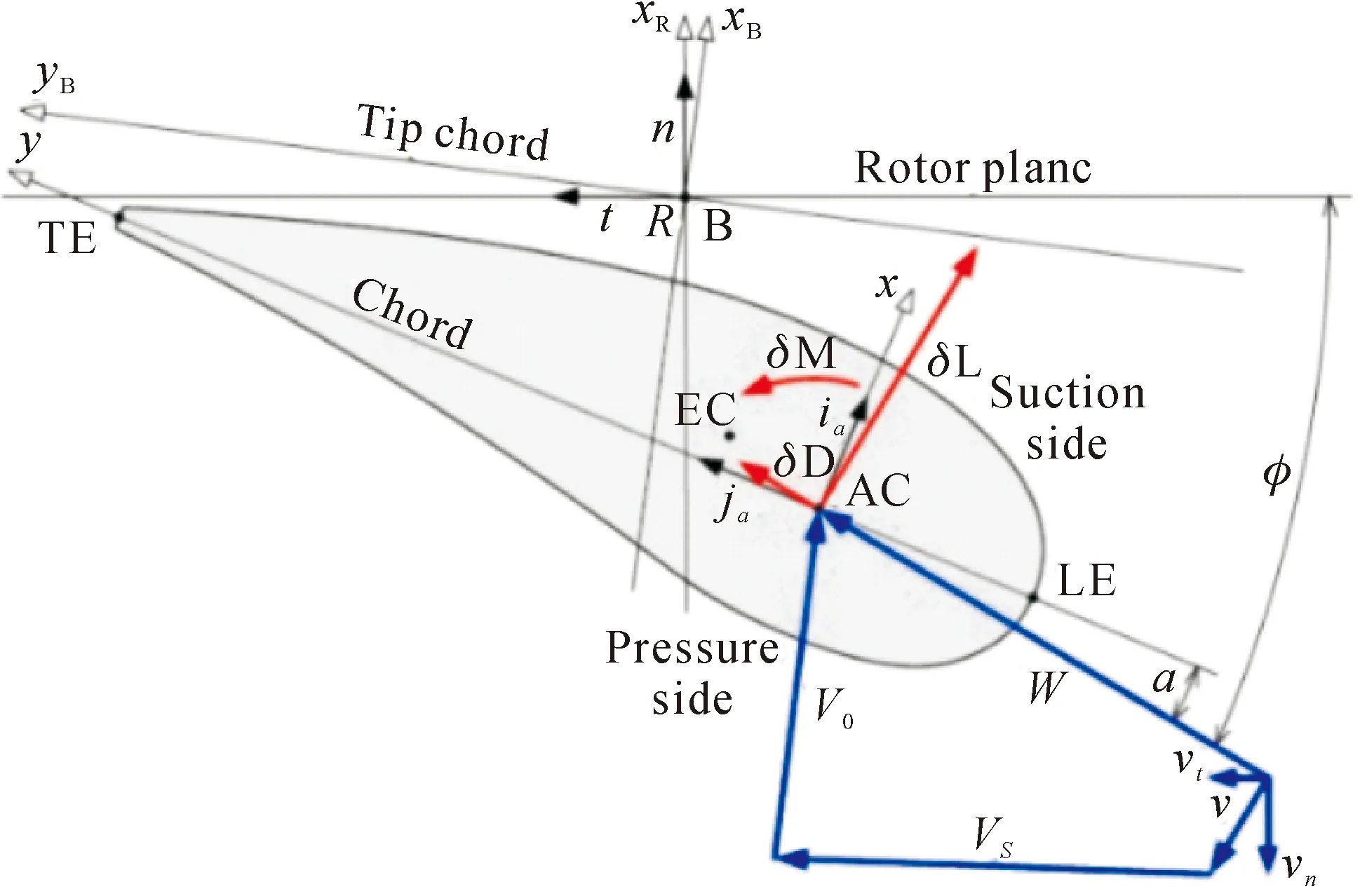
图3 风速合成示意图
半径为r处长度为dr的叶素所产生的转矩dQ为:
(2)
为了求解叶素位置处的轴向与切线气流诱导因子,叶素所产生的推力和转矩与通过叶素扫略的圆环的轴向和角度动量的变化率相等。应用起动圆盘动量理论的轴向和角度动量表达式,得到诱导因子表述如下:
(3)
(4)
其中
式中:B是叶片的数量;F是考虑到叶尖和轮毂损耗的因数。
参数H定义如下:
当a≤0.353 9时,H=1.0
当轴向感应系数a大于0.5时,风轮过载并运行在“湍流尾流状态”。在此条件下起动圆盘理论不再有效,推力系数的表达式:
CT=4a(1-a)
必须由经验表达式取代:
CT=0.6+0.61a+0.79a2
叶素理论实现的是基于经验模型的a值大于0.353 9而不是0.5的变换。这一策略导致了两种气流状态模型之间的平滑转换。
a与a′所展现的等式只能通过迭代数学方式求解,当tol 达到用户所允许的空气动力误差值时,迭代计算停止。
ak-ak-1≤tol
得到诱导因子后,就可计算叶片不同径向位置升力和阻力,然后就可以求得整个叶片气动受力情况。
实际风机叶片的受力情况要复杂的多,动态尾流、气动失速、偏航不对风,针对这些影响因素解决方法,可以参考GH BLADED 理论手册。
1.2 波浪力计算原理
目前,流体载荷计算常用计算流体力学方法,但这些方法对计算人员素质和计算机性能要求比较高,同时也不能满足计算效率的问题,所以,目前漂浮风机计算软件一般应用经验公式。
浮动结构上的载荷包括来自入射波的作用,来自平台运动产生的辐射作用(包括附加质量和阻尼效应)以及粘性力。通常用两种方法来模拟这些载荷,潜流理论和莫里森方程。这两种理论的适用性取决于结构的大小和水流状况。一般计算软件采用这两种方法之一,或两者的组合。
对于发生分离流的较小结构,通常采用莫里森方程。莫里森方程是经验导出的流体动力学模型,其包括来自波的附加质量效应和粘性力。莫里森公式通常用来计算框架结构上的粘滞摩擦力和惯性载荷。
当结构影响到波形时会产生衍射,特别是当D>0.2λ。这种情况下莫里森公式将不再适用。潜流理论模型将捕获来自波的衍射和辐射(包括附加质量和阻尼效应)的影响,但不捕获由流动分离导致的结构上的粘性阻力。对于一些像圆柱形状的简单结构,可以用MacCamy and Fuchs方法来解决衍射问题。
当结构尺寸大于五分之一波长时,也可使用组合理论方法,潜流理论解决方案用于对辐射和衍射负载进行建模,而Morison方程用于对粘滞阻力载荷建模。
1.3 结构动力计算原理
对于像风力发电机组这种大型结构系统计算方法绝大多数采用的是模态法,模态法最大优势就是它提供了一个相对少自由度风机的动力学计算方法,这对提高计算速度非常有效。对于模态法,关键工作是计算固有频率和振型。
求解机组模态,也是采用类似有限元的方法。先将结构系统离散化、然后进行结构单元特性分析,建立局部单元矩阵方程,如式(5)。
(5)

式(5)是单元的局部方程,把所有单元的局部方程组合成结构系统方程如式(6)
(6)
在漂浮式风机计算软件中,常把漂浮式机组锚链等效为系泊刚度作为求解矩阵方程的边界条件,然后用里茨法、矩阵迭代法、子空间迭代法等求解结构的固有频率和振型[7]。在计算得到结构的模态后,就可以用模态方法计算得到结构位移和变形,然后得到结构的载荷[8]。
2 漂浮式风机建模及动力特性对比
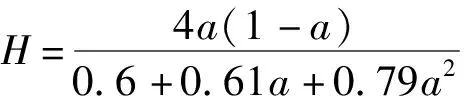
为更好比较漂浮风电机组载荷特性,除了漂浮式机组外,还计算了海上固定式机组。图4为行架式海上固定式基础风机,图5为TLP张力腿式漂浮式基础风机,图6为悬线链半潜式基础风机。三种机组相关配置参数如表2。
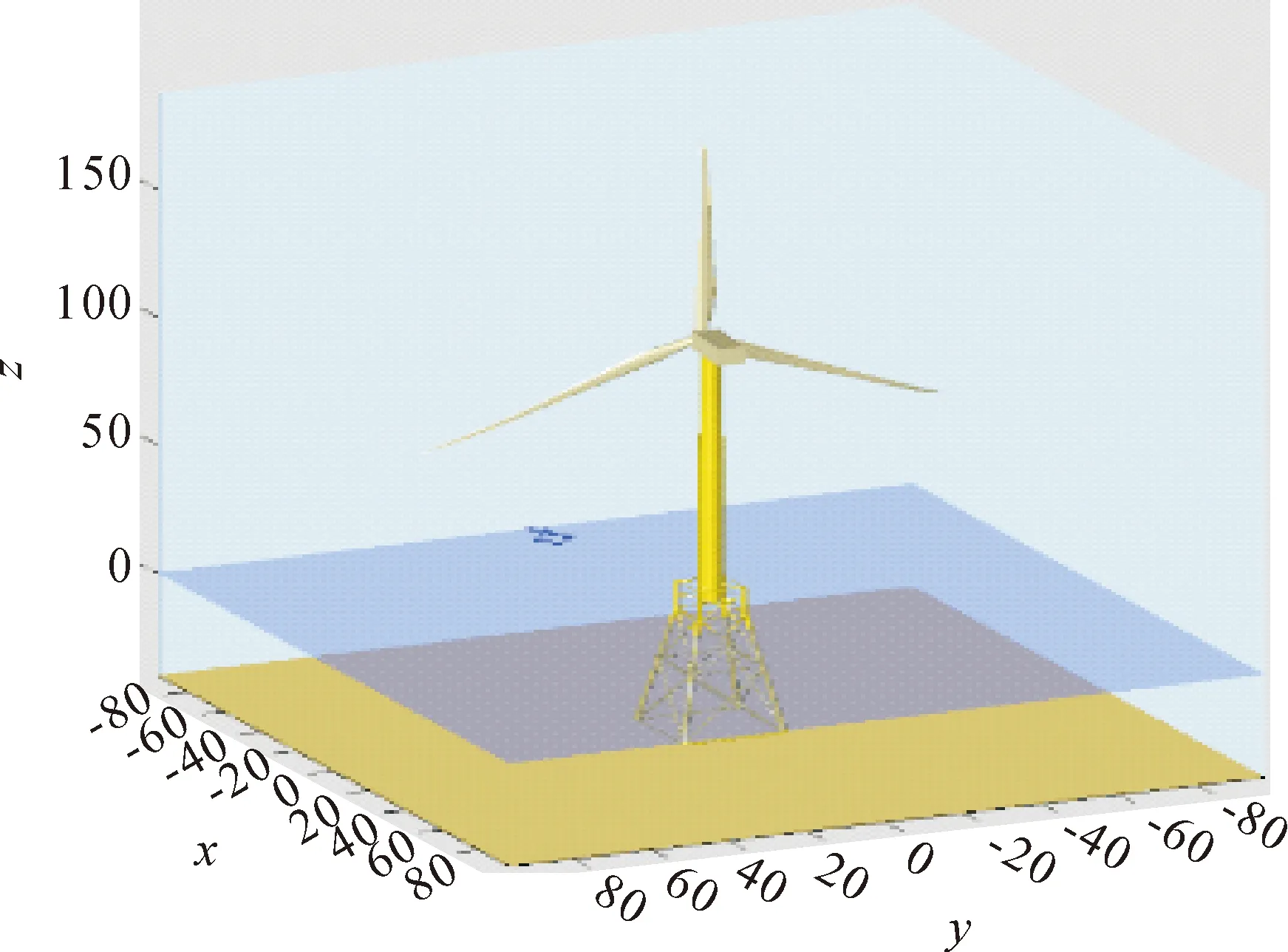
图4 固定式海上机组图
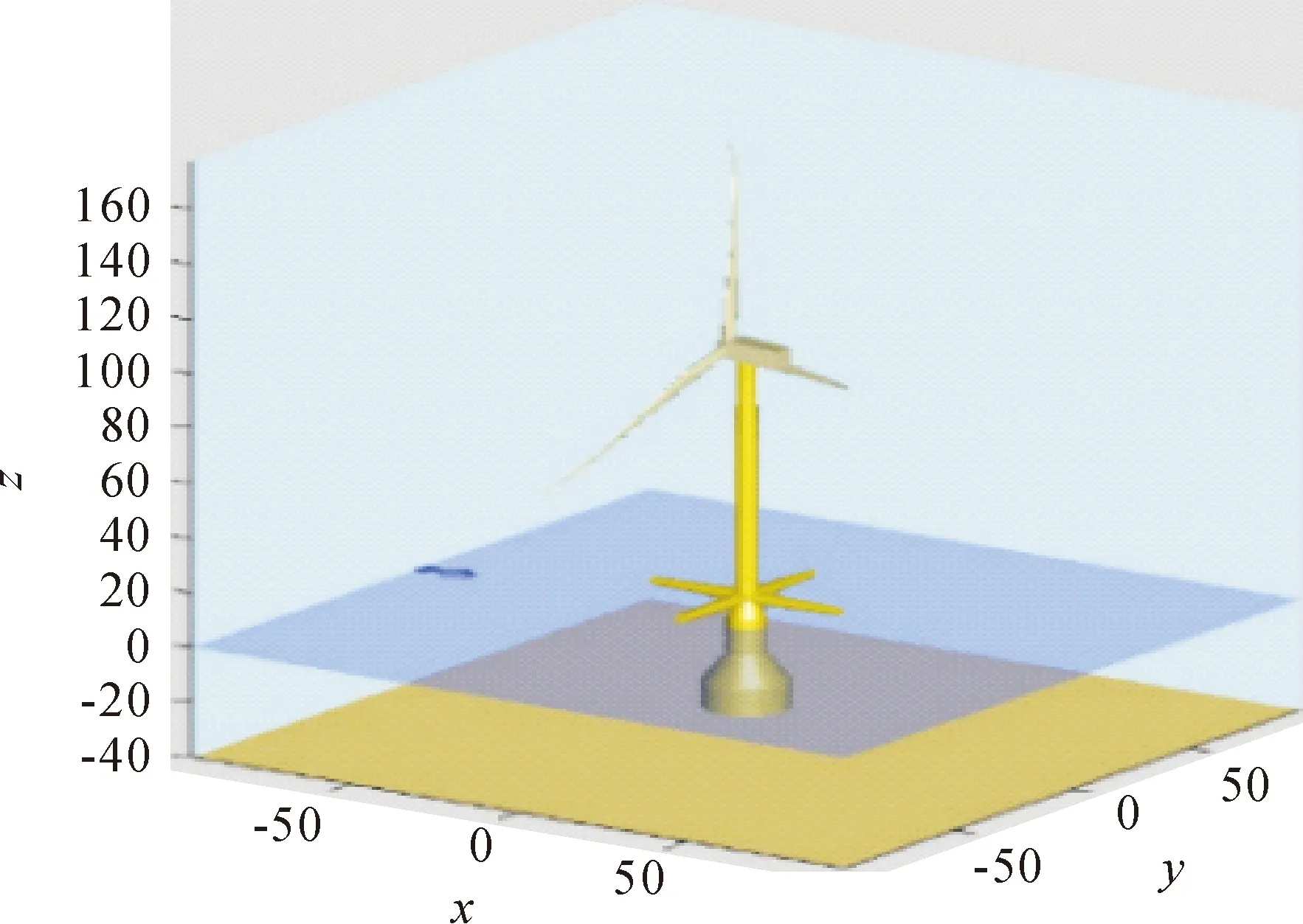
图5 张力腿机组示意图
图6 半潜式机组示意图
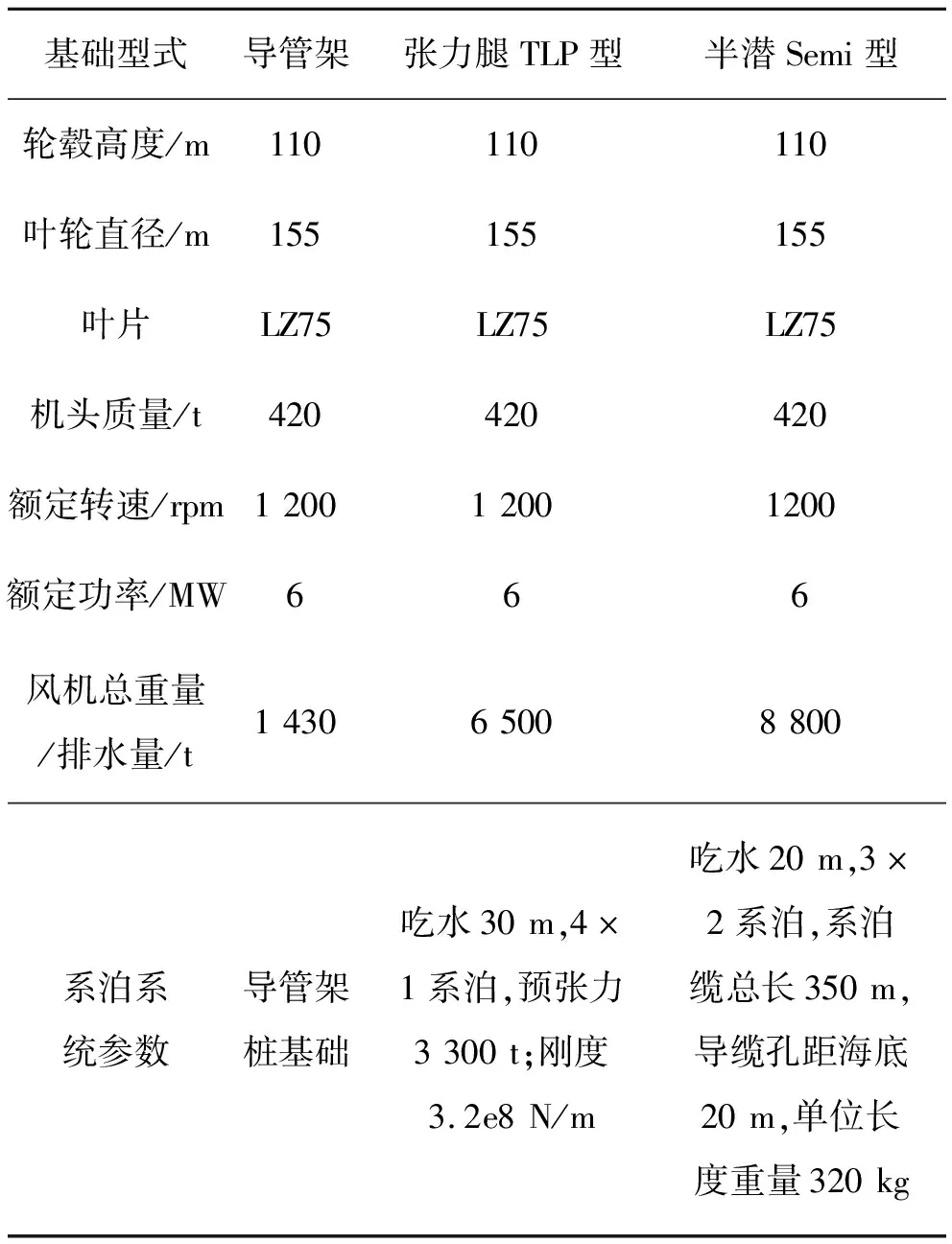
表2 不同基础形式的平台的风机的参数表
计算应用的风资源参考东海的环境和海洋参数。因风机在额定风速、切出风速和极限风速条件下机组的载荷特点最具代表性,所以选取额定风速(13 m/s)、切出风速(25 m/s)、极限风速(25 m/s)条件下的计算载荷作对比分析。具体计算风资源及海洋参数详见表3。
本文应用Bladed4.8软件计算以上三种基础型式风机的载荷,并进行比较。三种基础形式的风机频率特性差异较大,固定式一阶频率大于1P,而张力腿和半潜风机的1阶频率要小于1P。

表3 风机计算环境参数表
通过对表4三种基础型式的风机分析可得,固定式、张力腿式、半潜式风机的叶根载荷、轮毂载荷、塔顶载荷、塔底载荷和振动特性受波浪的影响比较小,主要是受风载荷影响。
固定式、张力腿式、半潜式风机之间对比发现,叶根载荷、轮毂载荷、塔顶载荷相差不大,但载荷呈现出依次增大现象;固定式和张力腿式风机塔底载荷相差不大,但固定式、张力腿风机的塔底载荷与半潜式风机载荷相差较大。三种基础型式机组的振动特性差异比较大。
通过对表5三种基础型式的风机分析可得,固定式、张力腿式、半潜式风机的叶根载荷、轮毂载荷、塔顶载荷、受波浪的影响比较小,主要是受风载荷影响;固定式风机塔底载荷和振动特性主要受风载荷影响,但张力腿式、半潜式风机的塔底载荷和振动特性同时受风载荷和浪载荷影响。
固定式、张力腿式、半潜式风机之间对比发现,叶根载荷、轮毂载荷、塔顶载荷相差不大,但载荷呈现出依次增大现象;固定式、张力腿式和半潜式风机塔底载荷和振动特性相差较大。
通过对表6三种基础型式的风机分析可得,固定式风机的叶根载荷、轮毂载荷、塔顶载荷、塔底载荷受波浪的影响比较小,主要是受风载荷影响;张力腿式、半潜式风机的叶根载荷、轮毂载荷、塔顶载荷、塔底载荷同时受风浪影响。
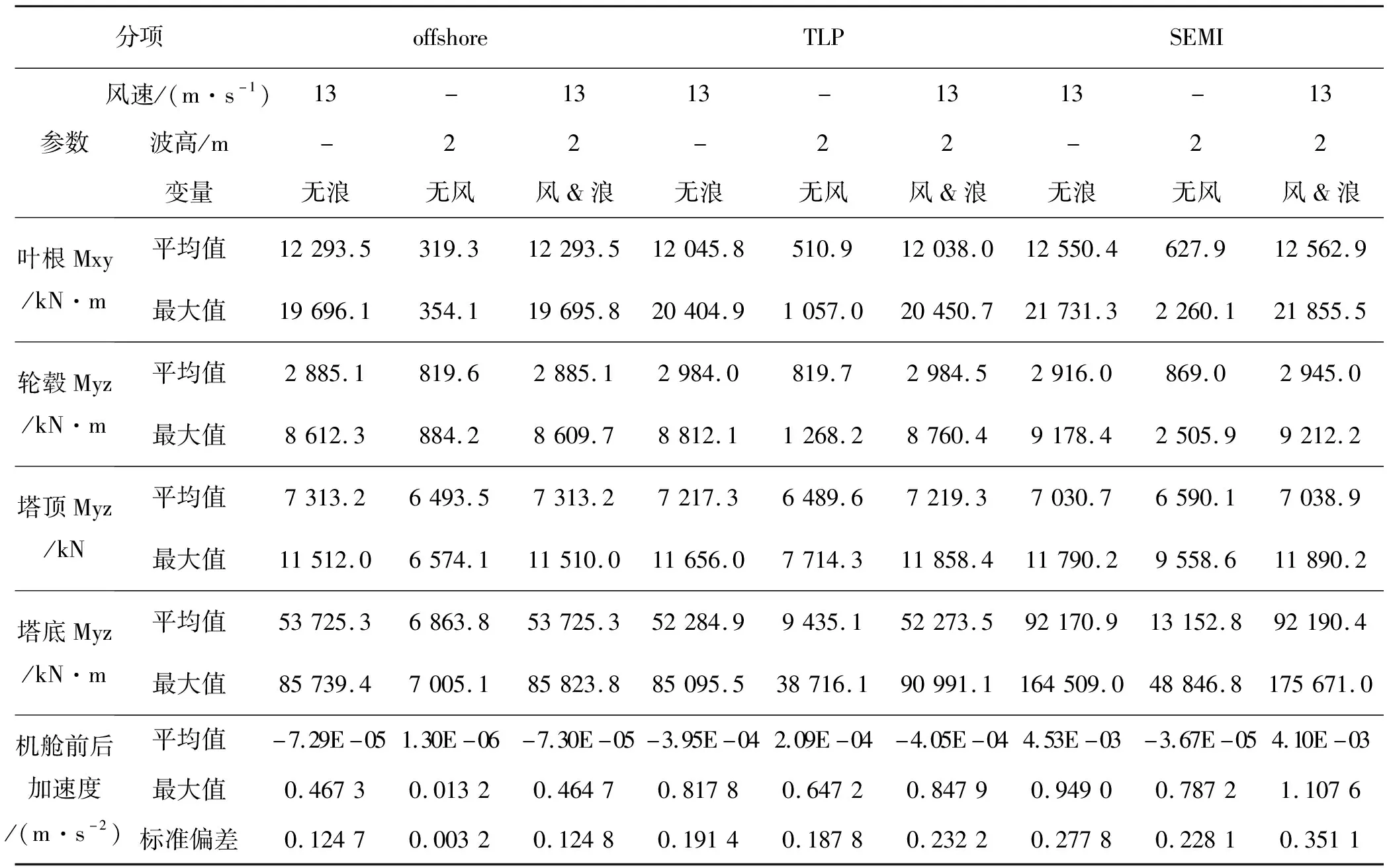
表4 额定风速下载荷统计比较表
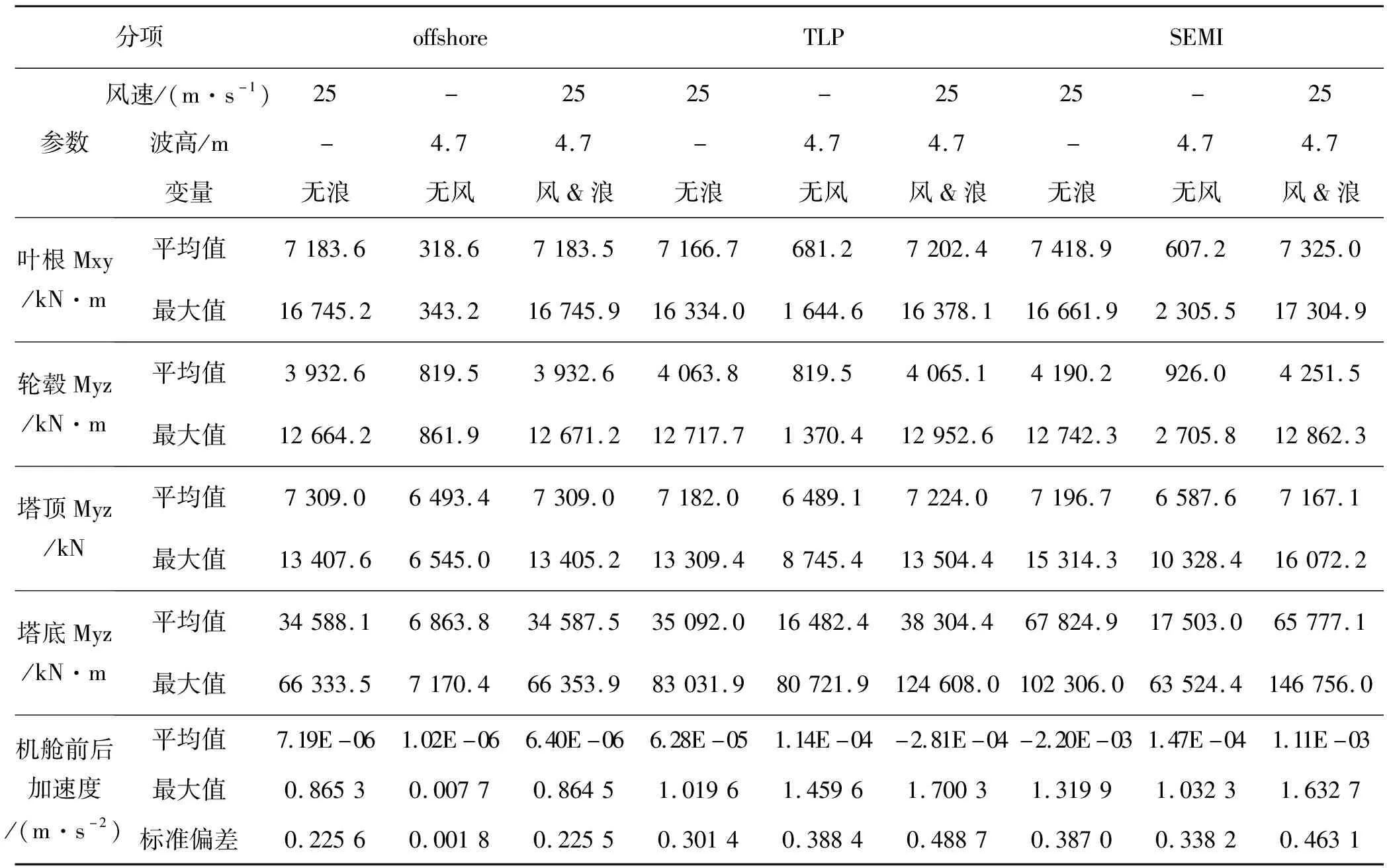
表5 切出风速下载荷统计比较表

表6 极限空转下载荷统计比较表
固定式、张力腿式、半潜式风机之间对比发现,张力腿式、半潜式风机的叶根载荷、轮毂载荷、塔顶载荷、塔底载荷表现出差异,但塔底的载荷差异要比其它部件的载荷的差异明显。
3 分析与总结
根据以上对张力腿、半潜式基础风机和固定式基础风机之间的对比分析,可知:
1)在发电情况下,风机塔顶以上部件的载荷主要受风载荷的影响,波浪载荷对上部部件载荷影响较小;当波浪较小时,塔底和基础平台部分的载荷主要受风载荷影响,当波浪较大时,塔底和基础平台部分的载荷同时受风和波浪影响。
2)发电情况下,固定式、张力腿式、半潜式风机之间对比发现,叶根载荷、轮毂载荷、塔顶载荷相差不大,但载荷呈现出依次增大现象。
3)发电情况下,波浪较小时,固定式和张力腿式风机塔底载荷相差不大,但与半潜式风机载荷相差较大;波浪较大时,固定式、张力腿式、半潜式风机塔底载荷差异明显。所以,张力腿和半潜基础风机对波浪的敏感性有一个从小到大的过程;张力腿和半潜基础风机对波浪敏感性差别较大。
4)风机在极限状态下,固定式、张力腿式、半潜式风机之间对比发现,张力腿式、半潜式风机的叶根载荷、轮毂载荷、塔顶载荷、塔底载荷表现出差异,但塔底的载荷差异要比其它部件的载荷差异明显许多。
从整体分析,张力腿基础风机载荷要大于固定式基础风机载荷,半潜基础风机载荷要大于张力腿载荷。其原因在于:半潜平台随风浪位移和摆动比较大,加之机头较重,其动力学响应要比张力腿和固定式基础平台风机剧烈,所以半潜风机载荷整体上要大于张力腿和固定基础平台风机的载荷;当波浪达到一定程度之后,这种载荷差异表现更明显,尤其是塔底载荷。
因此对于半潜式风机,主要是通过控制风机的摆动降低风机的载荷,也可通过风机整体参数、基础平台结构、锚链系统和控制系统等达到理想的效果[9]。