基于超声波雷达的泊车位类型检测
2020-05-03付鹏李嫩陈庚周琳
付鹏 李嫩 陈庚 周琳


摘 要:环境感知系统作为自动泊车系统的基础,其系统鲁棒性和精确性对于泊车成功率有着决定性的作用。目前车位检测方法主要分为测距技术和视觉技术两种。文章通过探讨超声波雷达的测距变化特点,对车位检测方法进行研究,确定不同类型泊车位情况下的车位约束条件,分辨待泊入泊车位的具体类型,为自动泊车做理论基础准备。
关键词:自动泊车;超声波雷达;约束条件;车位类型
Abstract: As the basis of the automatic parking system, the environmental perception system has a decisive effect on the parking success rate due to its robustness and accuracy. At present, parking space detection methods are mainly divided into two types: ranging technology and vision technology. This article explores the characteristics of ranging changes of ultrasonic radar, studies the parking space detection methods, determines the parking space constraints in different types of parking spaces, distinguishes the specific types of parking spaces to be parked in preparation for automatic parking. The detection principle is analyzed, and the limitations of parking space detection based on visual sensors are compared. The advantages of ultrasonic radar in parking space type detection are explained.
前言
自动泊车辅助系统(Automatic Parking Assistant,APA)作为汽车新四化中的智能化发展方向之一,其完善的功能储备有助于减少驾驶技术不熟练的驾驶员在泊车时发生交通事故的概率,方便了用户的生活。而随着城市化进程的加快,泊车环境也越来越恶劣,增加了泊车难度,自动泊车辅助系统的发展越来越重要。车位检测技术作为自动泊车系统的基础部分,检测效果对于泊车的成功与否有着至关重要的影响。随着科学技术的发展,传感器获取环境信息的方式呈现出多样性,车位检测方法也不尽相同。目前车位检测技术主要有基于视觉传感器的车位检测和基于测距技术的车位检测,由于视觉传感器需要识别泊车位标记的车位标记线,且识别精度易受光线影响检测成本较高,本文采用基于测距技术的车位检测。國内外学者对基于测距技术的超声波车位检测进行了研究,如:Wan-Joo Park等人使用超声波传感器进行车位检测,Degerman使用大量程超声波传感器,采用霍夫变换进行车位空间大小计算,何伟通过对传感器特性的研究与实际多次策略误差分析,得出补偿公式,精度控制在5%以内。目前,已有部分公司配置了此项功能如吉利、长安、大众、丰田等,一些激进的厂商选择采用视觉传感器做车位识别,但仍然有部分公司会选择超声波传感器作为车位识别基础。车位识别作为自动泊车中的基础部分,本文作者对平行、垂直、斜方位泊车的约束条件进行研究,从检测原理上进行分析,为泊车位检测做基础。
1 自动泊车辅助系统
1.1 自动泊车辅助系统工作流程
自动泊车辅助系统开启后,车辆通过传感器感知车辆周围环境,识别泊车空间及障碍物,车辆识别到相应类型的泊车位后,再比较车位空间大小。如果泊车空间小于最小泊车空间,则反馈给驾驶员当前泊车空间不符合要求,泊车功能不能激活,继续搜寻其他泊车位。如果识别到满足要求的泊车位,确定即将泊车的起始位置,是否满足泊车起始位置要求,如果不满足,则调整车辆起始位置,当起始位置在可规划路径的起始区域位中,则根据环境信息和车辆参数信息进行泊车路径轨迹规划。若规划成功,则提示驾驶员泊车系统可以激活;若不成功,则放弃此泊车位,继续寻找合适泊车位。路径规划成功后,驾驶员激活泊车系统,系统根据传感器采集的信息控制车辆方向盘和车速进行泊车。为保证泊车过程能够安全进行,将驾驶员的操作做为优先级别,泊车时驾驶员可以随时介入并控制车辆,防止由于传感器未识别或者错误识别障碍物而使得车辆发生碰撞,其流程图如图1所示。
2 泊车位识别
2.1 超声波测距识别理论基础
雷达技术来自仿生学中的蝙蝠,并广泛应用于航空航天、军事武器和智能车辆中。超声波根据其工作特点,具有抗干扰力强,良好的反射性能,指向性强且易于接收的优势,在自适应巡航、泊车辅助系统、紧急避撞等智能汽车驾驶辅助系统中均有运用。
超声波传感器由超声波发送器、控制单元、超声波接收器、电源。超声波测距原理如图2超声波发送器将电振动能量转化为机械超声波发送到空中,声波经障碍物反射后,由声波接收器将反射回来的波形转化为电能,根据发送和接收声波的时间差可以由公式(1)和(2)计算得到。
2.2 车位检测原理
根据车位标识线的不同可以将泊车车位分为平行车位、垂直车位和斜车位三类。泊车位类型不同,车位检测原理也相应的有所差异,而在同一类泊车位当中根据泊车位两侧的有无障碍,车位检测所用到的传感器也不相同。由于超声波传感器智能识别有障碍物时才能发挥作用,因此本文只对于有障碍物的泊车位进行讨论,分析不同类型泊车位的检测原理。
图3为左右均有障碍物情况下的平行泊车位示意图。自动泊车辅助相同开启后,车辆1缓慢向前行驶,在车辆1行驶过程中,超声波传感器不停的检测车辆与障碍物车辆2之间的距离y1,当车辆1驶离2后,传感器测得的距离会发生突变,记录此时的时间为T1,距离为Y2。车辆1继续向前行驶,Y2的值会在小范围内发生变化,直到在T2时刻探测到车辆2,传感器测得的距离y3会跳变,随后保持在y3小范围内跳动直到车辆1与3后视镜平行时停车,此时记为T3。通过对T1和T2时刻在速度上的积分可大致测得泊车位长度L,对T1和T2及T2和T3时刻测得的数据取平均值得到Y,y,可得到泊车位宽度W=Y-y。
在收集到相应的信息后,需要根据测得的参数判定泊车位类型。一般W约束为2.5m,为了保证泊车成功率此处给定2.8m,当满足约束条件时,可判定为平行泊车位,给定约束条件:L≥Lmin,W≧2.8m。
垂直泊车位的检测理论和平行泊车位大体相同,都是通过检测到传感器发生跳变的时间点进行分析,通过采取到的车位W和L与约束条件进行对比,满足约束条件则为垂直泊车位。垂直泊车位的约束条件与平行泊车位不同,其W受国家规定的一般泊车位需大于6m影响,需重新给定约束条件:L≥2.8m,W≧6m。
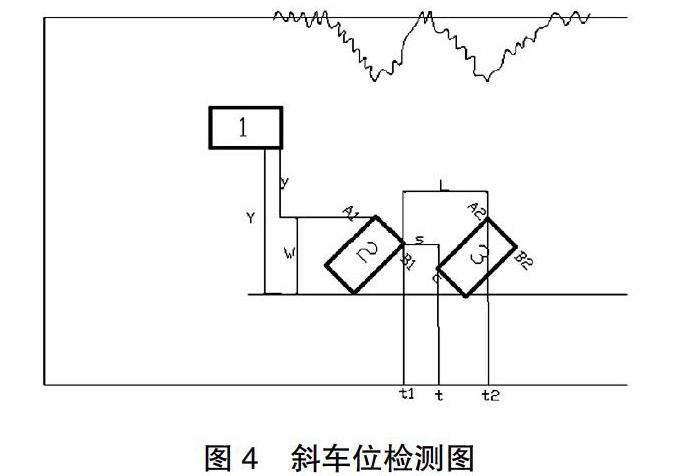
图4给出了斜车位检测示意图。通过超声波检测斜车位,在原理上区别于平行和垂直泊车位,障碍物停泊角度呈30?、45?、60?,车辆在检测泊车位时所得到的泊车位尺寸并非实际值,且仅仅通过简单的L和W值已不能形成比较有效的约束,此处引入测得泊车位的斜率k来进一步做判断所测泊车位类型的依据。
泊车辅助系统开启后,车辆1沿直线向前行驶,此时未检测到障碍物,超声波会在小范围内跳动,记录测得的距离为Y,在超声波传感器刚刚检测到车辆2时,传感器接收到的信号会有微量变化,随着车辆1继续向前行驶,测得的与障碍物之间的距离逐渐变小,直到传感器检测到车辆2的A1点时距离达到最小值,记录为y,随后测得距离逐渐变大,经过B1点后发生跳变,记录此时时间为t1,跳变后测距会在
小范围内发生变化,此时测距为W=Y-y,车辆1传感器检测车位c点时记录时间为t,經过c点后测得距离逐渐变小,到A2点时距离达到最小值,记录此时时间为t2,在t1和t2时间内对车辆1的速度进行积分可得到泊车位的L,对车辆1的速度在t1和t上进行积分可得距离s,记X=L-s,则斜率k=W/ X。
泊车辅助系统开启后,车辆开始搜索泊车位,收集传感器得到的泊车位信息并发送给处理器,当处理器判断所得信息满足约束条件:tan25?≤k≤tan65?,L≥2.8m,W≥6m。
3 结论
测距传感器具有功率大、指向性强、价格低廉、不易干扰的优点,在经济发展下行的情况下,配合主机厂提升产品功能可靠性的同时降低开发成本,帮助产品在竞争日益激烈的市场环境中,提升产品竞争力。本文在分析基于测距技术的不同类型泊车位检测原理后,从理论上分析了超声波雷达在泊车位检测功能上的可行性,可以对我们日常生活中的泊车位类型进行判定,判定的约束条件仅仅需要简单的条件就可以具体判断出所测泊车位的类型,为泊车辅助系统的基础感知系统做出了理论阐述。
参考文献
[1] Wan-Joo Park, Byung-Sung Kim, Dong-Eun Seo,et al. Parking space detection using ultrasonic sensor in parking assistance system[C]// Intelligent Vehicles Symposium, 2008 IEEE. IEEE, 2008.
[2] 郭孔辉,李红,宋晓琳,et al.自动泊车系统路径跟踪控制策略研究[J].中国公路学报(9):110-118.
[3] 李红.自动泊车系统路径规划与跟踪控制研究[D].湖南大学, 2014.
[4] 段现星.超声波传感器在倒车雷达上的发展[J].家电检修技术(6期):1-1.
