基于线状阵列扫描的激光雷达快速三维成像
2020-05-03曹家军许保瑜
曹家军 许保瑜
摘 要:本文介绍了一种线扫描快速扫描三维激光雷达成像仪。线阵激光雷达的系统结构和工作原理。从一个单元开始,根据对激光束发射和接收光路的分析,利用光学原理和解析几何方法,推导了一种严格的线阵激光雷达成像方案。计算公式,分析影响激光雷达成像质量的内外因素,现场试验表明,在30m的距离上,该仪器的工作原理是距离分辨率可达5cm,探测直径大于8cm目标,平面拟合后残差的标准差约为5cm。
关键词:遥感;激光扫描;三维成像;线阵
1 绪论
基于线状阵列扫描的激光雷达最近已成为距离测量和3D图像采集的重要方法。许多研究小组已经使用了一个雪崩光电二极管(GmAPD)作为在3D成像激光雷达系统的检测器,由于其非常高的检测灵敏度和一个简单的读出集成电路。但是,当在3D成像雷达系统中使用GmAPD时,存在一些缺点。首先,由耗尽区中的热噪声引起的暗计数在信号处理阶段会产生错误警报。其次,GmAPD与光强度无关,表明它无法区分信号和噪声。因此,在使用GmAPD获得清晰3D图像的雷达系统中,噪声消除过程至关重要。
麻省理工学院林肯实验室开发了具有GmAPD的3D成像激光雷达系统。他们的3D成像雷达系统是紧凑,轻便的系统,具有出色的性能。但是,它会产生大量噪点,因此需要大量时间才能去除清晰的3D图像的噪点,因为这是通过一系列图像处理算法完成的。
对于清晰的3D图像,去除噪声的阶段是必不可少的。因此,我们开发了一种低噪声3D成像激光雷达系统,该系统可以通过减少两次原始测量的飞行时间(TOF)数据的采集阶段,减少误报,从而以快速的采集速度获得清晰的3D图像。1×8GmAPD阵列。
2 低噪声三维成像激光雷达系统
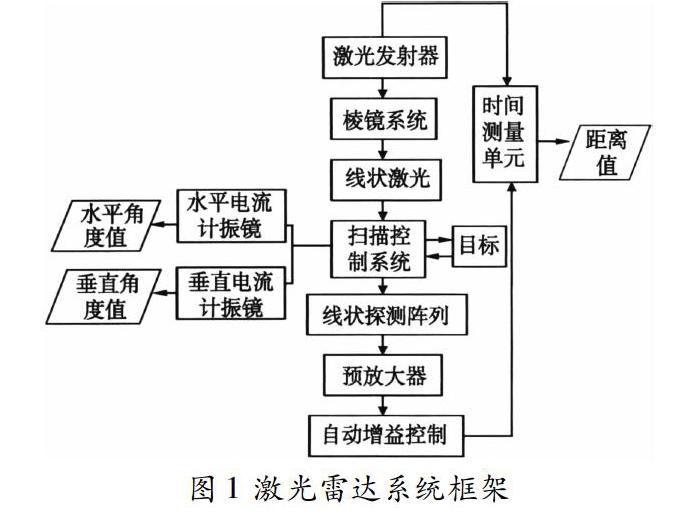
雷达系统分为两部分:其硬件和软件。图1显示了雷达系统的示意图。激光脉冲从光源发出并穿过光学系统。一小部分激光脉冲用于生成起始信号,其余的激光脉冲照射到目标上。接收光学系统收集视场(FOV)中散射的激光脉冲和背景光的一部分。然后,激光返回脉冲和背景光被分束器强度分成两半,并路由到两个GmAPD阵列。“与”门比较两个GmAPD阵列的到达时间,仅当来自GmAPD阵列的两个信号之间的时间差小于固定值时,才会生成停止信号。尽管由于将激光返回脉冲的能量分成两半而使信号减小,8]。TOF数据是开始信号和停止信号之间的时间差,它是在信号处理步骤中的TDC上生成的。然后,在图像处理步骤中,通过点云方法将TOF数据传输到一定距离以可视化3D图像。
2.1 硬件
具有二次谐波产生的二极管泵浦无源Q开关微芯片激光器(AlphalasPULSELAS-P-1064-300-FC/SHG)用作光源。由于激光器是被动调Q的,因此启动信号不能由激光器本身产生。因此,一小部分激光脉冲在45°反射鏡处传输到光电二极管。用于产生启动信号的PD是Thorlab高速Si检测器。其余的激光脉冲被反射镜反射并被透镜L1和L2准直。由于激光的单偏振,半波片(HWP)位于偏振分束器(PBS)之前,以便控制PBS1处激光脉冲的透射和反射。发射的激光脉冲通过扩束器。由透镜L3和L4的焦距以及扩束器确定的系统的FOV被设定为与假定高斯传播的激光束发散相同。在扩束器之后,激光脉冲被两轴电流扫描仪引导到目标,然后被散射。用于控制1×8GmAPD阵列光束指向的两轴电流扫描仪来自CambridgeTechnology,具有50mm孔径镜。来自系统FOV中目标和背景光的散射激光脉冲通过两轴电扫描仪,四分之一波片(QWP),PBS1,通过双轴电扫描器收集到GmAPD阵列(ID数量为id150-1×8)中。光学带通滤波器HWP2,PBS2和聚焦透镜按此顺序排列。由于微芯片激光器具有较窄的光谱线宽和温度稳定性,因此光学带通滤波器具有六个通道和50ps定时分辨率的TDC(AgilentU1051A)接收启动和停止信号,并测量它们之间的时间差。AND门的功能是比较由GmAPD阵列1和GmAPD阵列2测量的TOF。当将AND门的功能应用于TOF时,由于GmAPD中每个像素之间的时延特性不同,因此需要进行校准阵列1和2被定义为一个时间段。单位表示通过将总测量时间除以特定值而获得的时间间隔。通过计算系统的总体定时抖动,将时间段设置为3ns。
具有固定焦距镜头的电荷耦合器件(CCD)摄像机(PixelinkPL-B953U)被用作安装在系统光轴上的视轴摄像机,以拍摄目标。CCD摄像机的FOV比较符合系统的FOV。
2.2 软件
算法执行一系列功能步骤,以将系统获得的TOF数据转换为3D图像。接收到激光脉冲后,系统会提供二维深度图像,其中包括用于软件处理的角度深度数据和3D图像可视化数据。首先,将TOF数据转换为笛卡尔位置。使用每个像素的扫描角度和范围信息来计算笛卡尔坐标上的XYZ点。使用XYZ点,可以通过点云方案执行3D图像可视化。在点云方案中,将接收到的数据中的每个XYZ点简单地绘制在3D笛卡尔坐标中。
3 距离分辨率和3D图像
雷达系统的距离分辨率是其区分距离或方位非常接近的目标的能力。为了获得系统在100m处的距离分辨率,测量了所提出系统的TOF的标准偏差。在电动平移台上以10cm的间隔将测量目标定位在99.8m和100.2m之间。在每个位置使用10,000个激光脉冲获得标准偏差。
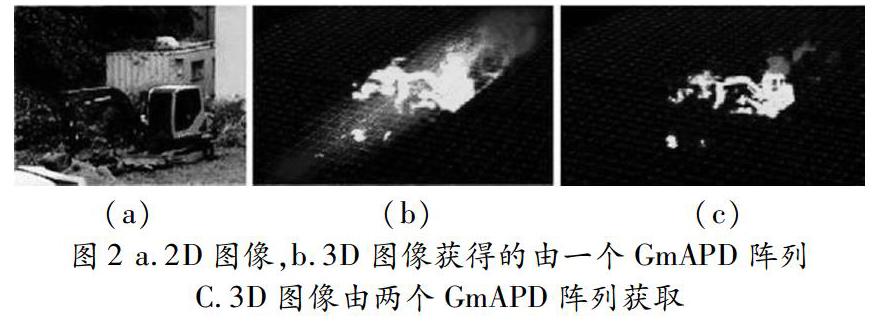
图2显示了场景的二维图像。场景距离约为60m。对于GmAPD阵列1和2,噪声的平均速率函数分别为16kHz和20kHz,该函数定义为撞击在检测器上的背景光子速率与GmAPD阵列的暗计数速率之和。三维图像以1164点×1170点扫描,视场(FOR)为4°×4°。图显示分别由一个GmAPD阵列和两个GmAPD阵列采集的3D图像。一个GmAPD阵列获取的3D图像文件的容量为162MB,两个GmAPD阵列获取的3D图像文件的容量为3.6MB。
4 小结
本文介绍了使用两个1×8GmAPD阵列的低噪声三维成像雷达系统。被动调Q开关微芯片激光器用作光源和cPCI系统,该系统包括TDC,并设置用于快速信号处理。提出的雷达系统能够以快速的获取速度获得清晰的3D图像,这是通过在TOF数据获取阶段结合使用1×8GmAPD阵列来减少误报而实现的。为1×8GmAPD阵列系统开发了用于三维可视化的软件。在100m处测量了系统的距离分辨率,并显示了白天由一个GmAPD阵列和两个GmAPD阵列采集的3D图像。
参考文献:
[1]蔡银桥,童小华,卜弘毅,等.非平衡状态下星载三维激光雷达图像畸变研究[J].宇航学报,(2):181-187.
[2]邓志辉,杨华军,朱颖.三维无扫描成像激光雷达原理改进与仿真[J].激光与红外,2011(4).
