卫星太阳敏感器模拟器校准技术研究
2020-04-30殷聪如唐友东
王 凯, 佟 雷, 殷聪如, 刘 民, 唐友东, 李 峥
(1. 北京东方计量测试研究所, 北京 100086; 2. 北京控制工程研究所, 北京 100086;)
1 引 言
姿轨控系统是卫星非常重要的分系统,卫星的姿轨控系统通常需要半实物仿真系统来模拟卫星各敏感器的正常运行[1~7]。常见的卫星敏感器模拟器包括:地敏模拟器、太阳敏感器模拟器、陀螺模拟器、喷气及动量轮模拟器等。其中,太阳敏感器模拟器在卫星姿轨控半实物仿真系统中用途广泛且测量精度高[6~13]。目前,卫星太阳敏感器模拟器的校准依靠数字表和动力学计算机完成。该方法需要人工设置、接线、抄数等工作[14],耗时费力,容易造成由于人员操作不当导致校准结果不准确等现象的发生。
本文阐述了一种自动校准太阳敏感器模拟器的装置,通过设置模拟器太阳角度信息,检测输出电流信号,反解太阳角度信息,通过计算实测值与理论设置值的偏差完成校准。该校准装置可实现太阳敏感器模拟器的全流程、动态校准,为监测卫星姿轨控系统的健康运行提供技术支撑。
2 太阳敏感器模拟器工作原理
太阳敏感器模拟器通过敏感太阳矢量(光线方向),可以获取卫星相对于太阳的方位信息。太阳敏感器模拟器接收动力学计算机设定的卫星姿态信息,根据太阳敏感器算法输出反应卫星姿态信息的模拟电流信号。每组信号包括14路编码,其中7道粗码、4道细码、2道监视码、1道全开码。粗码和监视码作为数字量处理,只判断其0/1;细码和全开码作为模拟量处理,需测量其电流量值大小。
太阳敏感器模拟器输出电流信号范围如下:
粗码输出为数字量,电流为0/-100 μA;监视码输出为数字量,电流为0/-50 μA;细码输出为模拟量,电流为0~-100 μA;全开码输出为模拟量,电流为0~-100 μA。
1) 粗码的形成:根据太阳敏感器模拟器角度信息的高8位(D13~D6),利用式(1)将二进制码转换为7位格雷码,即7道粗码。
Gi=Bi⊕Bi+1,i=0,1,…,6
(1)
2) 细码的形成:根据太阳敏感器模拟器角度信息的低8位(D7~D0),根据式(2)~式(5)计算出4道细码。
(2)
(3)
(4)
(5)
式中测量角αε为电角度,因为细码几何角度为2°,所以:αε=α×360/2,α为低8位表示的十进制角度值。以式(2)~式(5)中按照最大值取1考虑,细码为模拟量输出,输出最大值为-100 μA。
丁达、壶天晓、镜心羽衣以及他们的同伴都没有立即消失,云石导弹并没有给飞鼠带来他们想要的结果。撒手锏疑似失效,喵星飞鼠大使惊恐万分,他惊愕地望着眼前的一切,等待着,等待着丁达的消失。
3) 监视码和全开码的形成:监视码和全开码根据太阳出现信号SP61、SP62、SP13、SP43产生。监视码为数字量信号,SP信号为“1”时,相应探头的2道监视码输出为-50 μA。全开码为数字量信号,SP信号为“1”时,相应探头的全开码输出为-100 μA。
3 校准方法
目前,在科研机构对太阳敏感器模拟器的校准方法较一致,都为利用动力学计算机、被较准太阳敏感器模拟器、数字表和测试线缆完成校准测试工作。
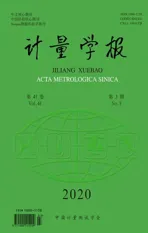
如图1所示,按照太阳敏感器模拟器接口定义,用针孔线将数字表串接入被校准太阳敏感器模拟器线路中,用通讯电缆将动力学计算机和被校准设备相连。在动力学软件设置太阳角度信息,被校准太阳敏感器模拟器输出对应的14路电流值。调节数字表合适的测量档位,观测数字表电流值并记录。以此类推,在动力学软件上设置太阳敏感器模拟器的典型值后观测数字表的读数。通过对比动力学软件上的理论值和数字表读数的实际值完成校准。
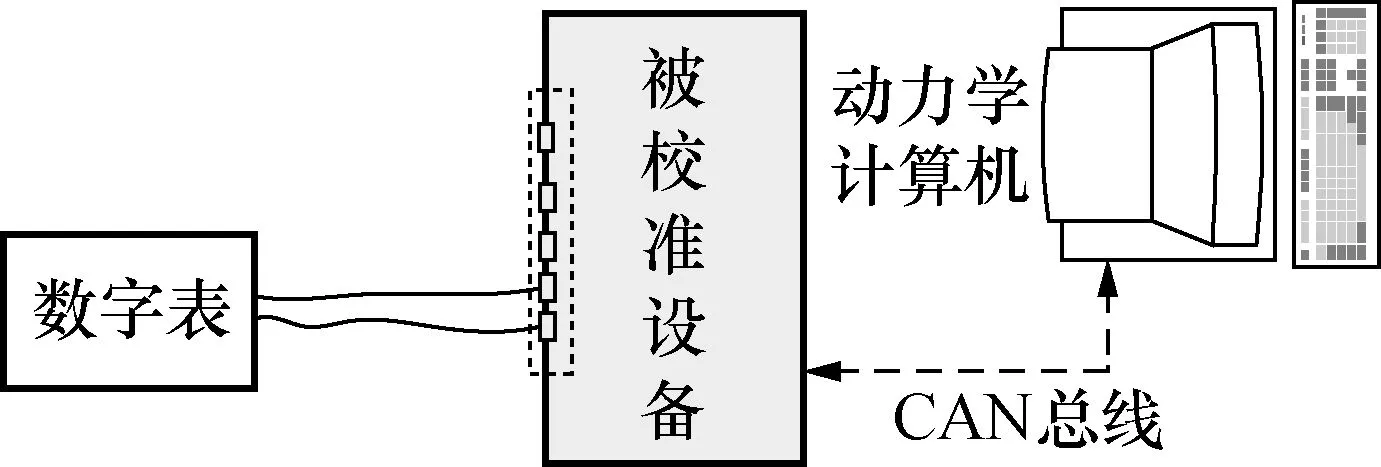
图1 目前太阳敏感器模拟器校准方法框图Fig.1 Currently solar sensor simulator calibration method sample
目前的校准方式有较多漏洞,如果仿真系统在校准过程的设定条件下工作正常,但更改条件或参量变化时,系统存在问题,则当前的校准工作无法及时反应。传统的校准方式不能体现仿真系统的动态性、全面性和准确性。此外,目前的校准手段、标准装置为各类仪器仪表,校准过程繁杂耗时。
4 设计实现
太阳敏感器模拟器接收太阳敏感角度设定,根据转换算法将太阳角度转换为14路电流信号。校准装置对4种类型的电流量进行采集,并解算出太阳角度信息,并与太阳敏感角度设定值求差;同时,在电流采集过程中,对每一路电流量进行误差测定,并给出信号误差。如图2所示。

图2 太阳敏感器模拟器校准框图Fig.2 Solar sensor simulator calibration block diagram
4.1 硬件设计
太阳敏感器模拟器校准装置内部逻辑电路如图3所示。
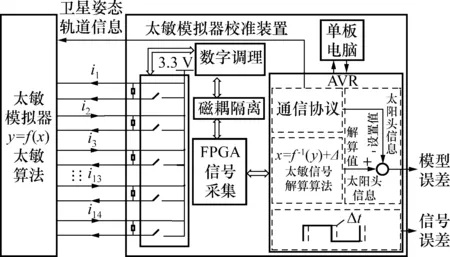
图3 校准装置硬件设计Fig.3 Calibration device hardware design
在进行测试校准时,将太阳敏感器模拟器输出的14路电流通过星表电缆引入校准装置。在校准装置中,设置14个通道选择继电器,可以完成信号的单通道测试。太阳敏感器模拟器输出的电流在采样电阻上产生压降,经差分放大和模数转换后,经FPGA采集太阳敏感器模拟器输出电流值。为了安全保护,数字电路与模拟电路通过磁偶隔离,经单片机进行推理反算后得到太阳头实测信息值,信息上传至单板电脑后与设置理论值对比并在动力学上位机软件显示,自动完成太阳敏感器模拟器的校准。

图4 校准装置接口逻辑电路Fig.4 Calibration device interface circuit
控制逻辑电路FPGA的主要功能为采集电流量信号。同时,还需要控制两类器件,一为通道选通开关,另一为AD控制。其中,电流信号有14个,共用一个采样电阻和AD。多路选通切换开关通过74HC595控制,间接通过FPGA控制。逻辑电路如图5所示。
图5 校准装置控制逻辑电路Fig.5 Calibration device control circuit
4.2 软件设计
校准装置上位机软件的主要功能是与控制单元进行通信,单板电脑通过网口对控制单元发送上位机指令,同时采集模块发送的回传数据通过运算并显示给用户以实现监测。上下位机的通讯应遵循一定的通信协议,通讯协议指令格式如表1所示。上位机发送指令格式和代码如表2所示。

表1 通讯协议格式Tab.1 Communication protocol format

表2 上位机下发指令Tab.2 The host computer issued instructions
考虑到需同时测量多组电流信号,N可为1-8;下位机返回指令如表3所示。

表3 下位机回传数据指令Tab.3 Followcomputer returns data command
太阳敏感器模拟器输出信号每组包含14路电流,下位机一帧将14路电流信号全部上传;每路上传电流信号为16位数据,前一个字节为低8位,后一个字节为高8位;测试模式下电流单位为A,上位机需除以系数10,上位机显示真实的测量值。
4.3 测试数据
表4为对14路电流信号进行理论值设置和实测值的读取。其中,表头角度值表示太阳角度信息的典型值。
通过测试数据可以看出,太阳敏感器模拟器校准装置误差满足型号的设计要求,最大允许误差范围如下。
细码:±5 μA;全开码:±5 μA;粗码:±10 μA;监视码:±10 μA。

表4 测试数据Tab.4 Test Data μA
5 不确定度评定
5.1 数学模型建立
太阳敏感器模拟器粗码、细码、监视码和全开码对应电流量误差:
ΔI=Δ1+Δ2+Δ3
(6)
式中:Δ1为标准设备测量不准引入的误差;Δ2为重复性引入的误差;Δ3为测量结果分辨力引入的误差。
5.2 不确定度传播率
太阳敏感器模拟器输出电流量引入的误差互不相关,故:
uc(ΔI)2=u(Δ1)2+u(Δ2)2+u(Δ3)2
(7)
5.3 标准不确定度评定
5.3.1 测量重复性引起的不确定度分量u1
测量重复性引入的标准不确定度按A类标准不确定度评定,选取100 μA点用校准装置对太阳敏感器模拟器输出电流量重复测量10次,利用贝塞尔公式计算:
(8)
5.3.2 校准装置误差引入的标准不确定度分量u2
当测试电流为0~100 μA时,直流电流最大允许误差约为1×10-6A,且认为是均匀分布,则:
(9)
5.3.3 校准装置读数分辨力引入的标准不确定度分量u3
校准装置电流读数分辨力为1.9×10-6A,且认为是均匀分布,则
(10)
5.4 合成标准不确定度
太阳敏感器模拟器粗码、细码、监视码和全开码对应电流量误差合成标准不确定度,取设备分辨力和重复性不确定度大者计算合成不确定度。
(11)
5.5 扩展不确定度
取k=2,则其扩展不确定度。
U(ΔI)=kuc(ΔI)=3×10-6A
(12)
6 结 论
随着型号发射数量逐年陡增,型号测试校准工作无论卫星部件研制还是从出场测试都扮演着越来越重要的角色。卫星姿轨控分系统中太阳敏感器模拟器的校准工作是保障卫星空间稳定运行的前提,也是支撑太阳敏感传感器生产研发的条件。太阳敏感器模拟器校准装置硬件上以高速FPGA和单片机为控制核心,高精度AD为采集模块;软件上采用优化反解算法,最终实现了卫星姿态信息的高轨和低轨所有状态的模拟校准过程。该设备的研发有利于技术人员更清晰、更准确地掌握空间中卫星的姿态轨道运行情况,提高了姿轨控半实物仿真系统的准确度。其优点在于:校准装置替代了目前由多个测试设备(数字表、动力学计算机等)组成的复杂校准系统,提升了工作效率降低了人工和时间成本;实现了卫星全流程不间断地测试;改进了人工计数、比对的校准方法,提高了自动化程度,保障了卫星健康运行。