一种自走式蔬菜收获小车的设计
2020-04-30赵劲飞王晓妍杜宇帆
赵劲飞,王晓妍,李 琨,杜宇帆,成 波
(塔里木大学机械电气化工程学院,新疆,阿拉尔 843300)
1 前言
温室大棚由于结构简单,建造容易,可避免恶劣天气、气候突变等诸多优点得到广泛的应用[1]。目前,温室蔬菜种植已经成为许多农民的主要经济来源,可缓解蔬菜淡季并且温室蔬菜种植的效益直接影响到农民的生活水平的提高[2],但是在温室蔬菜采摘的过程中往往存在许多问题,蔬菜在采摘的时候需要耗费较多的人力和物力,劳动强度较大,但采摘效率却较为低下。蔬菜采摘和出口的时间正是农作物收割的季节,手工采摘的方法采摘效率低,耗费时间周期长,必然会形成劳动力短缺的局面。因此,针对蔬菜采摘所存在的问题和市场需求,确定蔬菜的采摘工艺,实现蔬菜采摘机械化,研制高效采摘机,对解放劳动力、提高效率、获得高效益、支援农业生产有着不可替代的价值。因此研究设计了一种适合温室大棚菜叶采摘、收获的智能型收获小车,不仅减少农民劳动力同时也增加收入,提高效率。
2 整体结构设计及原理
2.1 整体结构图
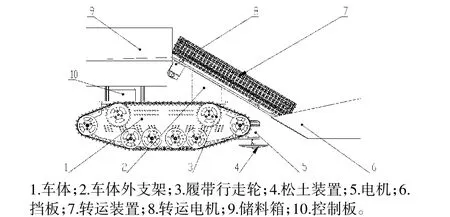
图1 整体结构图
其工作原理:工作时,垅上的蔬菜从喂入口进入到传送带和传送带之间,此时,松土电机上电开始转动,在传动装置的作用下,松土刀同步转动,对蔬菜根部的土壤进行破坏,由于喂入口至转运通道之间是渐缩的,因此,松土后的蔬菜会被传送带和传送带夹紧,随着传送带和传送带被转运至储料箱内进行储放,另外在转运过程中,蔬菜的根系会与格栅板发生碰撞或者摩擦,来将蔬菜根系上的土壤进行清理。如图2所示的电路原理图。
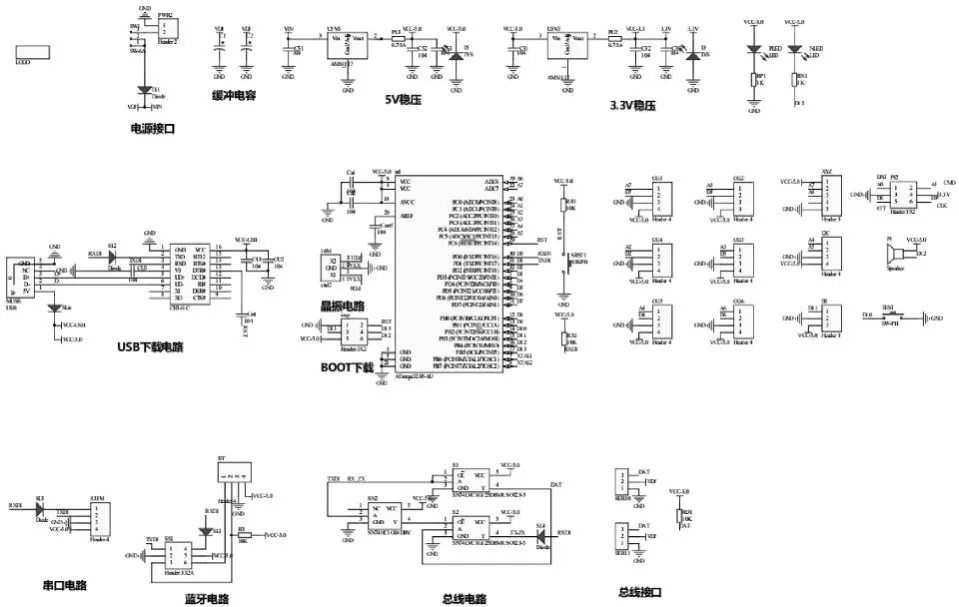
图2 电路原理图
3 关键部件的设计及分析
3.1 转运装置的设计
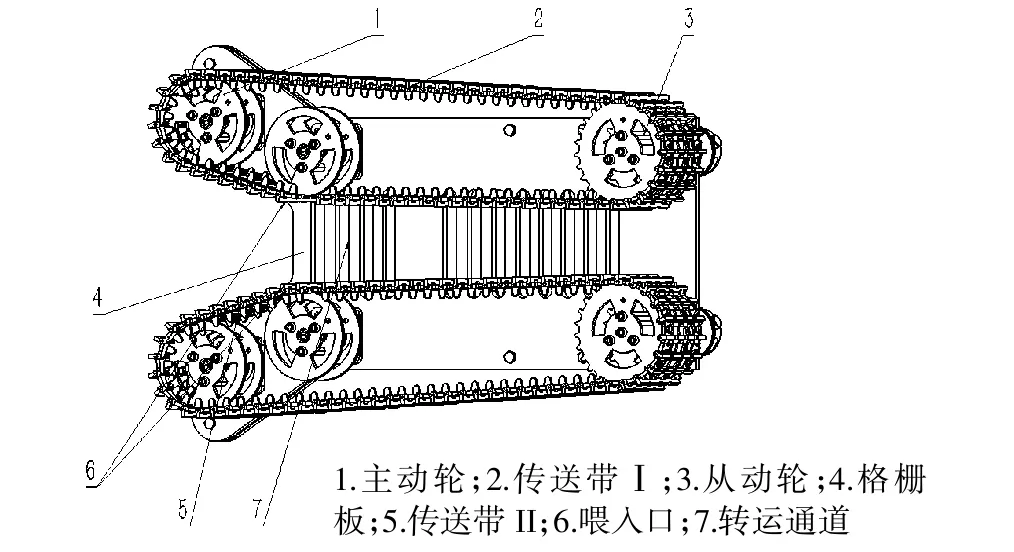
图3 转运装置的设计图
转运装置包括位置相对的传送带I和传送带II,传送带I和传送带II的运行方向相反,且传送带I和传送带II之间的距离逐渐减小并趋于稳定,形成稳定的转运通道,传送带I和传送带II分别由对应的电机驱动运行,传送带I和传送带II之间的距离最大处即形成喂入口,松土装置安装在喂入口的正下方位置处。
3.2 松土装置图
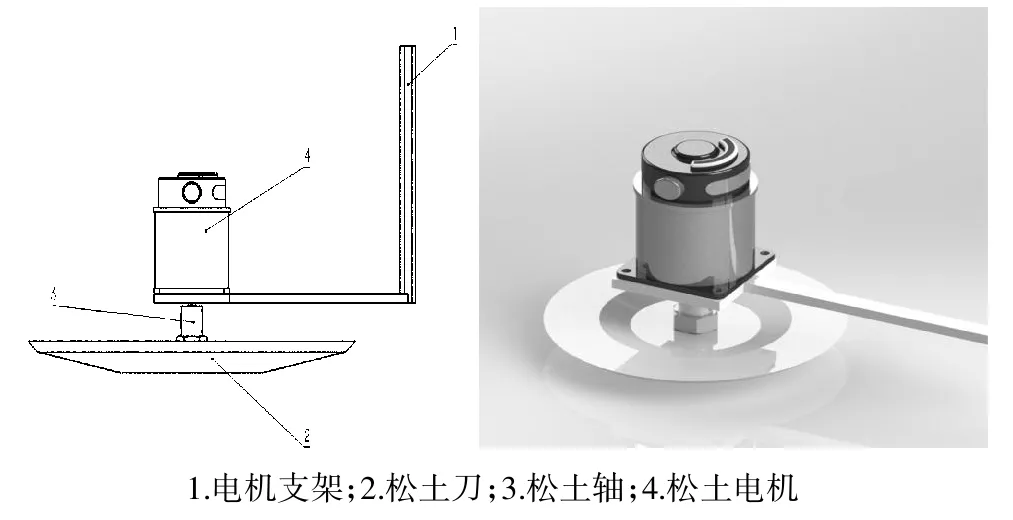
图4 松土装置二维图和三维图
如图3所示在电机支架上安装有松土轴,松土轴的端部从电机支架上伸出且固定有松土刀,松土轴由安装在电机支架上的松土电机通过传动装置驱动转动。
3.3 底盘设计及仿真分析
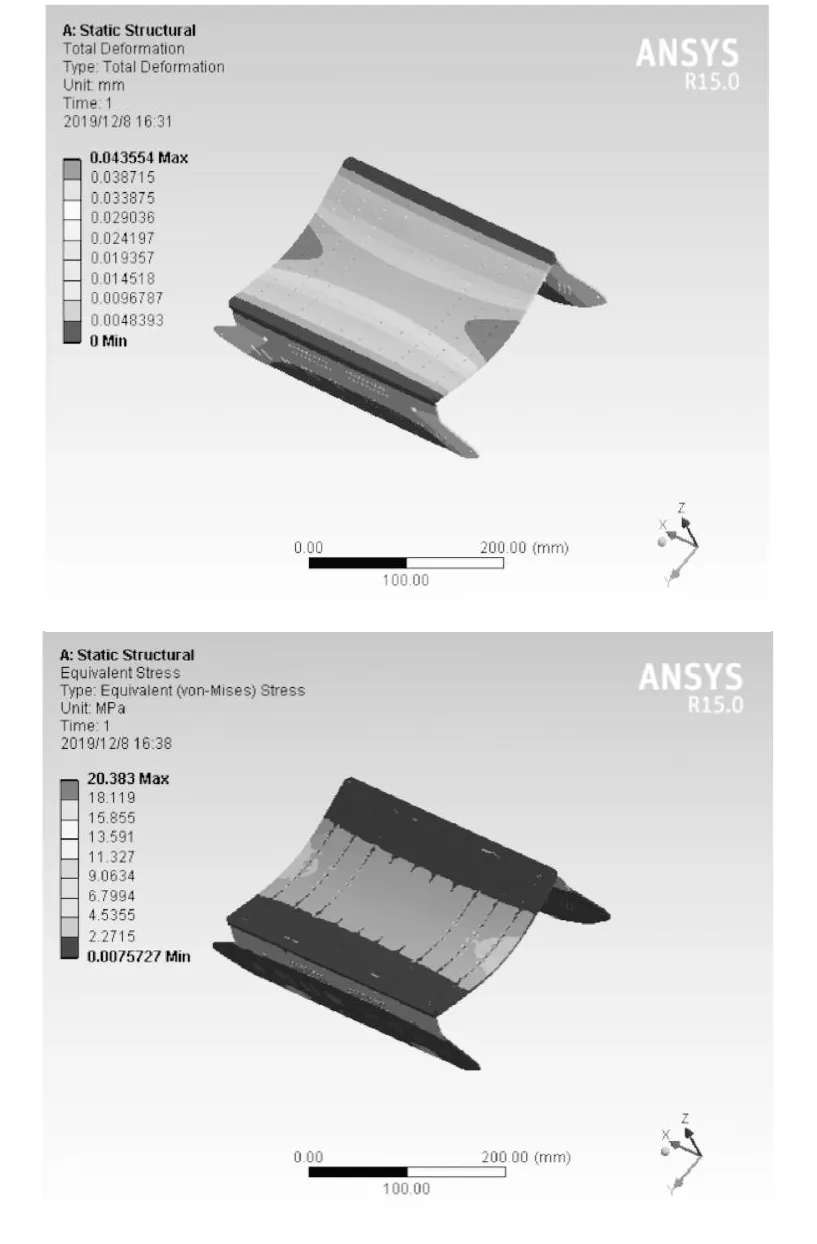
图5 仿真分析图
在设计中底盘称重最大为30kg,由ANSYS仿真软件分析图可得底盘整体位移最大变形量是0.043mm且在样机工作作业中完全符合需求;由图5可知底盘最大应力值为20.383MPa远远小于所选用的材料是Q235钢板(其最大应力值为235MPa)完全符合所选用的变形材料强度要求。
4 试验
如图6所示的是2019年11月15日在塔里木大学实验室进行的性能和收货效果测试实验图。
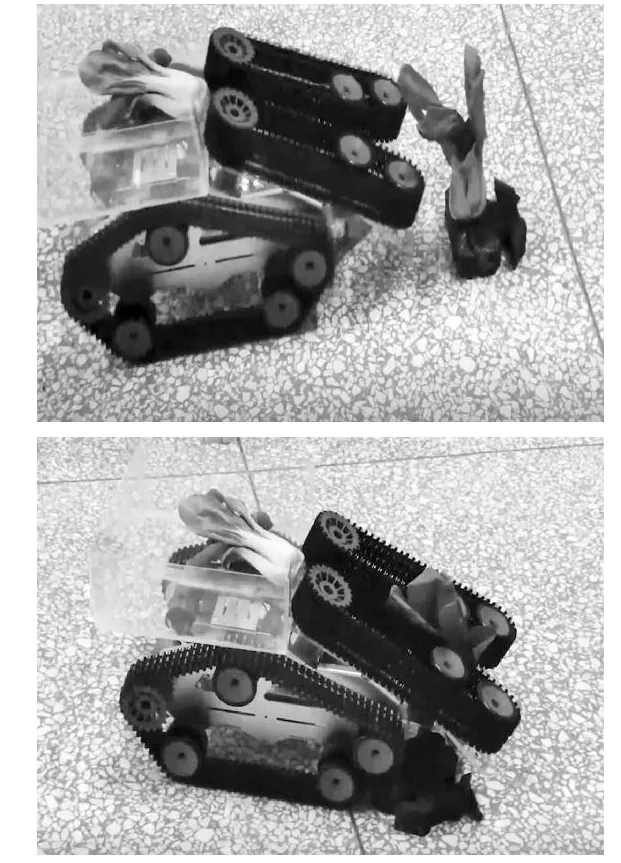
图6 样机试验图
经试验可得出能实现对蔬菜的自动采摘和自动转运,并且可有效对蔬菜形成夹持效果,避免掉落的情况发生,极大地提升了蔬菜的采摘效率。
5 结论
(1)设计一种自走式蔬菜收获小车通过试验可知该样机收获效率高,节约劳动力为大棚蔬菜收获提供方便。
(2)通过软件分析底盘位移变形量为0.043mm满足样机收获作业要求,并且最大应力值为20.383MPa远远小于所选材料应力值满足设计要求。
