基于自抗扰控制的Buck 变换器无源控制研究*
2020-04-30王久和
黄 硕 王久和
(北京信息科技大学自动化学院 北京 100192)
1 引言
随着全球能源危机以及环境问题的日益显现,新能源的发展受到了各个国家的重视。然而由于新能源发电电压的随机性以及各式负载对不同电压等级的要求,因此新能源以及负载都需要通过不同类型的变换器来接入电网[1-2]。
由于变换器具有非线性特性,传统的线性控制方法存在着较大的局限性[2],其只能分析静态工作点附近的稳定性,而针对大信号扰动问题的稳定性分析还有所欠缺[3]。因此各种非线性控制方法被提 出来,如反馈线性化、反步控制法、滑模控制、无源控制以及自抗扰控制等。基于反馈线性化控制理论的控制器设计方法需要全状态可测量、需要精确抵消动态、会引入控制器奇异性,对参数的依赖性较大、控制律复杂。反步控制法计算量大,实时性差[4];滑模控制会给系统带来抖动问题[2]。1989 年由 Ortega 等[5]提出的无源控制(Passivity based control,PBC)由于其能量耗散特性可实现系统的全局稳定性,无奇异点等优点,现已应用到机械、电气、机电等各个控制领域[6]。文献[1-2,7]利用无源控制分别对Buck 变换器、Buck-Boost 变换器进行控制,均实现了系统的稳定运行,并且拥有良好的动态和稳态性能。但是PBC 依赖精确的数学模型,在系统受扰动或者内部参数发生变化时,会存在静态误差问题。
因此,针对上述问题,以Buck 变换器为例,建立基于欧拉拉格朗日(Euler Lagrange,EL)模型的无源控制器。首先保证系统的稳定性,对于无源控制在系统受扰动或者参数变化时存在的静态误差问题,文献[2,7-9]都采用PI 控制结合PBC,但是该控制方法存在快速性与超调之间无法调和的矛盾,因此本文结合ADRC 可以把系统的未建模动态和未知扰动作用都归结为对系统的“总扰动”而进行观测并予以补偿的优点,从而解决PBC 存在的问题,使系统具有更加良好的鲁棒性。
最后利用Matlab/Simulink 中搭建的仿真模型,进行了仿真研究,并与PI+PBC、PI 控制方法进行比较,试验结果验证了本文所提控制策略的正确性以及有效性。
2 Buck 变换器无源控制
2.1 Buck 变换器数学模型
Buck 变换器的拓扑结构如图1 所示,其中V为IGBT,VD 为二极管,L 为电感器,C 为电容器,R 为电阻,E 为电源电压,Li 为通过电感器的电流,uo为电容器两端的电压。
假设电路中的元器件均为理想元器件,在连续导通模式(Continuous conduction mode,CCM)下工作,选择电感电流开关周期平均值Li 和电容电压开关周期平均值 uo为状态变量,即由图1 可得,Buck 变换器的数学模型为
式中,d 为Buck 变换器V 的占空比,0 ≤ d≤ 1。
于是,由式(1)可得Buck 变换器的EL 模型为
下面分析Buck 变换器的无源性。
设系统能量存储函数为
可得
从式(4)可以证明,该系统是严格无源的,因此,Buck变换器必然稳定[4]。
2.2 无源控制器设计
可得
为加速误差能量存储函数快速收敛到0,需要进行阻尼注入。可得
于是
由式(9)可知,误差能量存储函数可以收敛到0,式 (8)所得的无源控制器可实现控制目的。
于是,根据无源控制器(式(8))可得Buck 变换器的占空比为
目前,无源控制器中关于注入阻尼Ra1的具体取值还处于研究阶段。取值过小会对能量函数收敛速度不利、取值过大以达到过快的能量函数收敛速度则不可实现。现阶段Ra1的取值主要有两种方法:① 通过建立小信号模型以实现具体指标进行取值[2,8];② 根据具体被控对象,先确定一个初值,再根据变换器动态性能予以调试。
3 自抗扰控制器设计
自抗扰控制技术由我国著名学者韩京清提出,由非线性跟踪微分器(Tracking differentiator,TD)、扩张状态观测器(Extended state observer,ESO)以及非线性状态误差反馈(Nonlinear state error feedback, NLSEF)三部分构成,其控制框图如图2 所示。ADRC将系统自身模型的不确定性以及系统的外扰一起看成整个系统的扰动,解决了快速性与超调之间的矛盾,避免了积分反馈的副作用,具有很强的鲁棒性[10]。
Buck 变换器输入侧与输出侧的功率平衡表达式为
将式(11)整理成为自抗扰控制器的规范形式为
由于为一阶系统,并且对流向负载的电流loadi进行直接测量,因此,简化后的自抗扰控制框图如图3 所示。
为了解决PI 控制存在的问题,ADRC 采用非线性组合,引入fal 函数。于是,误差反馈控制律为
4 仿真研究
为了验证本文所提控制策略的有效性,在Matlab/Simulink 中搭建如图4 所示的仿真模型,并与PI+PBC、PI 控制方法相比较,从而证明该控制策略的优越性。仿真参数如表1 所示。
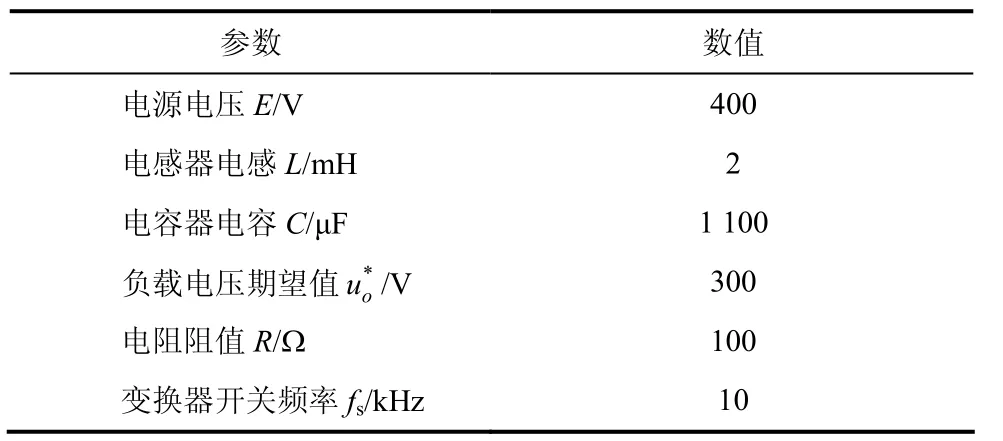
表1 系统仿真参数
本文采用方法②来选取注入阻尼Ra1的数值。通过调试,最终选取Ra1= 30 Ω。
Buck 变换器在没有增加任何扰动情况下的起动过程如图5 所示,从图5 中可以看出,PBC 在系统到达稳态时,存在稳态误差。PI+PBC 控制以及ADRC+PBC 控制可以解决此问题,PI 控制同样可以达到期望值,但是可以看出,该控制方法无法解决快速性与超调之间的矛盾。并且ADRC+PBC 控制方法达到期望值的速度也较快。
为了验证该控制策略的鲁棒性,在0.5 s 以及1 s时投切50 Ω 电阻负载,从图6 中可以看出PBC 在Buck 变换器投切负载的过程中,负载电压会偏离期望电压值,而PI 控制、PI+PBC 控制以及ADRC+PBC 控制可以克服此问题,恢复到期望电压值,其中ADRC+ PBC 控制中负载电压变化幅度最小,恢复时间最短。
考虑电源电压变化较为激烈的情况,图7 所示为电源电压变化过程,图8 所示为电源电压扰动时,Buck 变换器负载电压的动态响应过程。从图 8 中同样可以看出,在电源电压扰动时,ADRC+PBC 控制下的负载电压变化幅度最小,恢复时间最短。
从上述仿真结果便可以看出,本文所提控制策略可以解决PBC 控制在系统受扰动时存在的静态误差,同时与PI+PBC、PI 控制方法相比,负载电压变化幅度较小,恢复时间更快,具有良好的鲁棒性,从而验证了本文所提控制策略的有效性以及优越性。
5 结论
本文针对无源控制(PBC)在受系统扰动时存在静态误差问题,结合自抗扰控制(ADRC),即内环PBC,外环ADRC,较好地解决了此问题。与其他控制方法相比较,本文所提控制策略具有以下优势。
(1) 无源控制由于其能量耗散特性,可实现系统的全局稳定性。
(2) 结合自抗扰控制后,在系统受扰动的情况下,负载电压变化较小,恢复时间更快。 该控制策略可推广到其他类型变换器。
