电梯导轨检测的技术创新研究
2020-04-30
(湖北特种设备检验检测研究院,湖北 武汉 430000)
当前各大城市中出现了越来越多的高层建筑,电梯作为高层建筑的必要配置,尤其是垂直升降的电梯需求数量在不断增加。电梯的舒适性、安全性成为电梯生产企业一项基本的技术性能要求。其中,电梯导轨作为电梯的导向装置,在电梯运行系统中有着十分重要的作用,其产品质量与安装质量的好坏对电梯运行有着直接的影响。为了保证电梯导轨能够正常使用,各个导轨生产企业都将制造误差进行了合理的控制。为了避免电梯导轨出现误差,在进行电梯安装验收过程中,会进行电梯导轨误差检测,这也是验收电梯导轨的重要环节。
通常情况下,大部分电梯导轨厂家会采用吊线尺量的传统方法进行测量,并且是以垂线来作为直线基准,分成了多段多点的人工测量方式,这种测量方法点数少,同时也容易受测量人员经验的影响。除了这种方法之外,还可以用激光垂准仪检测导轨垂直度,这种高精度的铅直激光束代替重了锤线,会有二维数显光靶固定在导轨上,当光靶上有激光照射后,就会出现相对于起始处的测量值 X、Y 值,与传统的吊线尺量方法相比,这种检测精度有了很大提高,但是有一定的局限性,在条件不符时,也需要用手动测量,难免会出现人工误差。
该文针对电梯导轨检测技术进行创新,研究出一种电梯导轨检测技术,综合考虑了电梯导轨检测系统的适用性与完整性,旨在解决传统技术中电梯导轨检测效率低下,且检测精度难以满足要求的人工误差问题。
1 电梯导轨
电梯轿厢在运行中的导向作用主要是由电梯导轨来实现的,电梯导轨对整部电梯的运行质量,具有直接的决定性作用。电梯导轨通过导轨压板和导轨支架安装在电梯的井道之中。当前最为常见的电梯导轨是T 型导轨。
在电梯运行过程中,电梯导轨作为电梯系统的重要部件,在舒适度和安全方面具有十分重要的影响。从安全方面来讲,电力导轨的材质是决定电梯安全的主要因素,一旦材质出现局部过硬或者不均匀,就会导致安钳制动夹紧时,出现摩擦力不足的问题,从而造成电梯制动失效,甚至会出现轿厢坠落的安全隐患[1]。同时,导轨也需要有足够的强度来支撑,以适应安全钳制动时对轿厢产生的冲击力。从舒适角度来讲,实心导轨的连接精度是通过导轨的端部尺寸及阴阳榫的对称度来决定的,空心导轨及扶梯导轨的连接精度是由导轨的端部尺寸及形位公差来决定的,导轨的连接精度直接影响电梯运行的平稳性及舒适度。导轨导向面粗糙度直接影响到导靴在导向面上能否平滑运行,同时也影响了润滑油的储存,从而影响了轿厢的运行质量[2]。同时,导轨上任何一点的弯曲及扭曲都会给轿厢一个侧力,影响轿厢上下的直线运动,使轿厢有晃动感,随着电梯速度提高,轿厢会有振动感,从而影响舒适度。
总而言之,电梯导轨的平面必须是光滑的,不能出现凹凸不平的现象。由于导轨是电梯轿厢上的导靴和安全钳的穿梭路轨,所以安装时必须保证其有适当间隙,当电梯中导轨出现超速时,需要承受电梯制停,所以也不能忽视电梯导轨的刚性。
2 电梯导轨拖拽小车一体化智能检测系统
该装置包括伺服电机、曳引线缆架和检测小车;曳引线缆架设有线缆、固定架和活动轴,曳引线缆架与活动轴相连,活动轴在转轴的带动下进行旋转,线缆的端部与所述检测小车相连,将检测小车设于待检测电梯导轨上。在对电梯导轨检测的过程中,小车不再用自身携带的电动机提供动力,而是通过伺服电机的转轴带动曳引线缆架的活动轴旋转,从而为检测小车提供动力,避免由于检测小车自身携带电动机产生的振动影响测量精度。
2.1 电梯导轨检测系统功能
电梯导轨拖拽小车一体化智能检测装置用于电梯导轨安装和运行维护中的垂直度、直线度和接头台阶偏差等多项误差自动检测,可以减少人力物力,提高检测效率和检测精度,为电梯安全平稳运行提供保障。电梯导轨拖拽小车一体化智能检测装置原理如图1 所示。1)测量过程中,检测装置中携带的检测器件进行了自动检测,同时还可以自行校准。检测装置中包括测量小车 、运动动力系统、测量信号接收系统和基站系统,可以实现无线通信、监测显示、图像识别以及声光报警等功能。2)电梯导轨垂直度、直线度和导轨接头台阶偏差的检测可以通过检测装置实现,在小车上的多个位置点安装传感器,通过高精度的传感器来记录导轨各个测量部位的参数,由此得出电梯导轨各项参数的误差[3]。3)测量装置在测量的过程中,可以使用无线数据传输和控制技术来实现测量装置的启动和停止。
最后,利用外部拖曳的设计来实现装置小车的自带动力,这样可以减少由于自有动力检测装置小车出现振动而出现的检测误差,从而有效还原电梯导轨的实际安装情况。
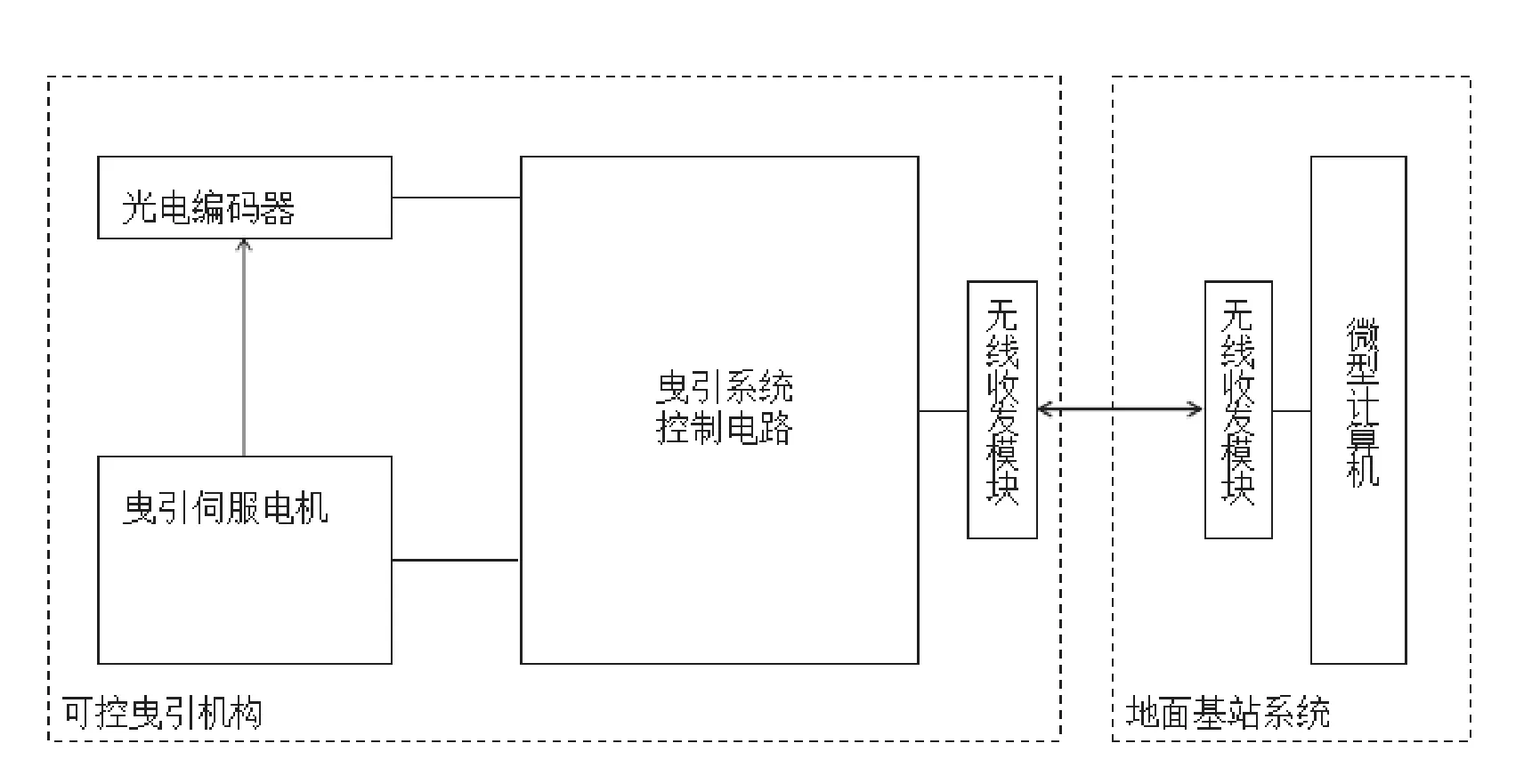
图 1 电梯导轨拖拽小车一体化智能检测装置原理
2.2 各模块介绍
2.2.1 可控制曳引机构
可控制曳引机构是该电梯导轨检测系统的重要组成部分。传统的测量方式是通过自身携带的电动机来为导轨检测提供动力,这样容易出现振动,影响测量精度,同时还给测量平台增加了一定的重量。该设计中电梯导轨拖曳小车一体化智能检测装置,采用的是线缆曳引的方式对测量平台的运动进行有效控制,而可控制曳引机构由控制电路、伺服电机、曳引线缆以及滑轮组组成,控制电路接收到由地面基站发出的控制信号后,驱动伺服电机运转,通过线缆牵引测量平台沿导轨运动完成测量动作,实现测量平台运动速度的可控性,这样可以对多种误差进行测量校正。
2.2.2 测量平台
测量平台属于自适应调整结构设计,通过弹簧夹紧,调整夹紧度来满足不同工作条件的要求,小车上布置有磁铁元件,通过磁力与导轨吸附。测量平台由测量小车及其搭载的多种传感器构成,测量小车由电磁磁轮定位在电梯导轨的3 个待测平面,电磁磁轮可由电路控制调整吸附力的大小,以满足不同工作条件的要求和方便拆装,在工作表面较光滑时,可以加大电流以增大吸附力,防止测量平台脱轨,小车上搭载一套基于单片机的嵌入式控制系统,顶面与导向面共计3 个待检测平面,分别产生3 路信号,每个待测平面布置2 只倾角传感器和1 只加速度传感器,在行进过程中接收地面基站发出的测量指令后,控制传感器完成测量动作,多个倾角传感器实时测量所在平面的倾角,以此完成直线度和垂直度的检测,加速度传感器测量小车的横向振动,以此计算接头处的台阶偏差及接缝等误差。
2.2.3 基站系统
该系统采用微型计算机控制整个测试系统的测量工作,需要编写控制软件、信号处理软件和测量小车单片机嵌入式软件系统。基站系统主要由1 台微型计算机以及1套信号收发装置构成,微型计算机上安装该项目中开发的控制软件及信号处理软件。导轨检测工作人员通过微型计算机上的控制软件向测量平台发出指令,并实时监测测量平台的状态,防止出现冲顶、脱落的情况,信号处理软件处理传感器测出电梯导轨3 个待测平面的误差,并以曲线的形式显示在屏幕上,然后通过表格的形式存储在硬盘中,以备复查。控制软件安装在地面基站系统的微型计算机上,用于控制与监测整个测量系统的状态。控制软件界面主要包括测量小车监控界面、曳引系统监控界面2 个主要界面,控制软件后台需要与用于信号收发的单片机系统通信,该项目拟基于微软的MFC 完成控制软件的编写。信号处理软件用于处理测量平台回传的信号,显示界面主要显示电梯导轨多项误差的曲线,后台的数据处理方法拟采用小波变换的方法,通过对原始数据的小波进行变换处理,得到电梯导轨的接头处的台阶、接缝等误差。
3 结语
电梯导轨轨距及垂直度是保证电梯安全、舒适运行的重要性能指标。该文提到的电梯导轨拖拽小车一体化智能检测装置,可以实现自动测量导轨垂直度等误差的功能。该检测系统利用曳引式的运行方式,不仅减少了测量平台的重量,还加入了保护装置来保护电梯设备的安全性。同时通过传感器获取运行过程中的传感器信号,反映电梯导轨表面的参数,改进了检测小车的精度、直线度、垂直度和接头台阶误差算法,提高了电梯导轨的检测精度,减少了人工测量带来的误差。