又见“减配门”
2020-04-26邱洪涛
邱洪涛

不久之前,微博爆出特斯拉涉嫌欺诈,擅自将自动驾驶单元模块由报备的HW3.0降级为HW2.5,陷入“减配门”,为此,工信部对其进行了约谈。其实,约谈算是轻的,根据国内相关法律,受到减配影响的车主完全可以以涉嫌欺诈对特斯拉特提出惩罚性赔偿。而特斯拉对此给出的解释,却未免有些敷衍。辩称是由于疫情影响导致国产的HW3.0版本模块供应断货,降级到HW2.5是为了保证按时交车的无奈之举,言下之意就是不承认存在减配行为,是为了能及时交车而做出的“最大的努力”,这到底是想洗白自己,还是越抹越黑呢?相信大家心里都明明白白。
减配是国人买车心中的痛,若不是工信部及时出手制止,特斯拉方面估计还要继续下去。特斯拉国产化还没多久就玩儿起了减配,幻想着车主不会在意这0.5的差距,无疑于掩耳盗铃。
我们不妨先来看看其官方声明中的解释:“现阶段,如果没有选装FSD功能,使用HW2.5的Model 3车型与使用HW3.0的Model 3车型在驾乘体验和使用安全上基本不存在区别。而所有选装FSD的客户,我们已经为其安装了HW3.0硬件。”意思说得很明白,选装了掏钱了就不用减配,没选装的不想花钱的,对不起,你没资格吃螃蟹。同样是买了份牛肉面的套餐,加5块钱加大的碗里配的是牛肉,不加钱的只能配豆皮儿,不好意思,我买的是就是牛肉面,请给我换回牛肉。


除此之外,我们还注意到,官方的措辞是两个版本的硬件“在驾乘体验和使用安全上基本不存在区别”,事实真的如此么?我们不妨从技术角度解释一下HW2.5和HW3.0的区别。
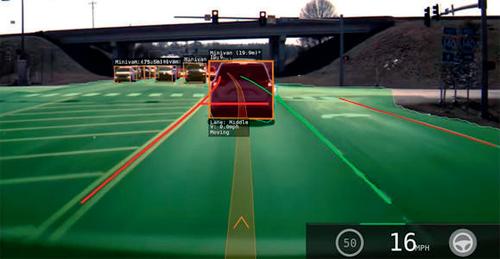
首先,可以肯定的是特斯拉在自动驾驶领域走在前列,他们的起步差不多直接来到了L2+级别,早期特斯拉产品的辅助驾驶功能就能够准确及时地分辨出车辆周围的道路情况和障碍物种类。也就是说,特斯拉很早就能够做到车道保持、偏离预警、ACC自动巡航,而且能够明确告知你旁边掠过的是汽车还是自行车,而要实现这一点就要依赖强大的图像处理能力。
图像处理的手段就是运算,即通过图像采集设备将图像转换为RGB或者其他图像数据形式的数据矩阵,简单说就是把图像变成数存起来,图像上某个点的红色有多少,蓝色有多少等等。在收集完这些数据之后,接下来就开始通过计算来识别图像上的物体了。
目前处理图像所运用的运算手段中最为高效的是一种叫卷积的算法,就是一种利用迭代因子在一个矩阵区域内逐个乘积后累加的运算,因为计算过程就像把一组数字铺平一边乘一边加,就好像卷东西一样,所以形象地称为卷积。卷积运算可以通过迭代因子将图像中的某种轮廓更加突出,也可以模糊掉,也就是PS软件中常见的锐化和模糊,比如说通过计算发现黑色的数据形成了一个环状的形状,那么就可以简单的判断是一个轮子。
然而卷积的计算量十分庞大,人的运算能力是有限的,但芯片就不一样了,就拿本次事件的主角HW3.0版本上的特斯拉自主研发的计算芯片来说,它是由两组神经网络处理器组成的,想象一下神经网络,每一层上的每个点都与下一层上的点建立链接,由此所产生的计算能力十分惊人。
HW3.0的主板上有两颗这样的芯片,其总计算能力达到144TOPS(144 Tera operation per second,即每秒144萬亿次),这个数值已经超出常人理解范围,但只有这样的超高计算量,才能满足高等级自动驾驶的需求,因为处理模块要在很短的时间内判断车辆周围的情况,并做出反应,计算量不够是万万不行的。


但实际上还远不止这些,HW3.0使用的是特斯拉全新自主研发的自动驾驶技术,虽然HW2.5在名字上与其有联系,但实际上却是两种不同的解决方案。HW2.5是图像处理界大佬、显卡“一哥”英伟达公司提供的芯片支持,主板上以一枚Pascal架构的GPU芯片和两枚Parker处理器为骨架,它的优势在于多通道运算,能够很清晰的逐个识别图像中的目标物。但即便如此,HW2.5每秒只能够处理110帧图像,而HW3.0每秒则是2300帧,处理能力高下立见。此外,HW3.0上还有专门负责判断和执行的控制单元,也就是说两颗芯片专门负责运算,这样一来,其运算效率更高。所以,特斯拉官方给出两者“基本不存在区别”是绝对站不住脚的,他们似乎隐瞒了什么。
我们再来看HW3.0的解决方案,上面介绍过的两枚超大运算能力芯片是可以独立运行的,两者运算出结果一致后执行单元才进行下一部动作,而且使用期间一颗芯片发生故障,另一颗完全可以独立运行,这样的冗余设计大大降低了故障所带来的风险。
更深一步考虑,HW2.5版本的解决方案类似于找特征图的方法,每个计算单元找自己负责特征的事物,是一种多维度输出的解决方案,这种解决方案虽然可以高效地找出障碍物特征图,但很容易发生误判或者判断冲突的现象,比如这个版本尚且不能识别桩桶。之前特斯拉自动驾驶事故频发也可能跟这种架构存在弊端有一定关系,这也让马斯克痛下决心对自动驾驶的解决方案重新规划。

HW3.0在硬件结构上与HW2.5是完全不同的,它的想法是通过图像全面地识别,将图像计算成一张“哪里可以走哪里不可以走的”视觉判断算法地图,不只是单纯地看到了卡车就要躲开这么简单了,而是车辆眼前是一张真实的画面,前方有一个路灯、3个行人、一辆停着的卡车、两排树,就像人类一样看到的是实实在在的画面,在画面中圈出一定的区域为安全区域可以行驶,其行为轨迹与人类的判断极为相似,仿生学的神经网络在晶体管的串联下拥有了真正思考和学习的能力。
综上所述,HW3.0的实力远超HW2.5,所以特斯拉你是选择亡羊补牢还是接着忽悠,自己看着办吧。
