基于环形对称Gabor变换的接触网销钉检测研究
2020-04-24高聪林建辉邓韬杨见光
高聪,林建辉,邓韬,杨见光
(西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
0 引言
接触网是电气化铁路的重要组成部分,接触网支持与悬挂装置工作状态的好坏直接影响列车受流状况及其受流质量,与接触网的安全状态息息相关[1]。随着高速铁路6C系统的发布实施,针对接触网系统中的关键零部件,利用高清相机结合图像处理技术进行定位识别及故障分析已经成为主要研究方法[2]。
随着C4检测系统技术指标要求不断细化,基于图像处理技术的非接触式检测技术研究不断深化。文献[3]利用改进的HOG特征及离散余弦变换特征增强,训练AdaBoost分类器检测承力索座、利用圆弧检测和聚类判别辅助承力索缺失;文献[4]基于HOG特征与二维Gobor小波变换实现耳片断裂故障检测;文献[5]基于LBP-HOG实现了接触网旋转双耳区域识别;文献[6]利用HOG特征与支持向量机和AdaBoost 分类器级联的方法实现接触网斜撑套筒的定位;文献[7]基于卷积神经网络的深度学习方法实现接触网定位器检测和识别;文献[8]利用HOG特征以及支持向量机和极限学习机实现了定位线夹的定位和检测;文献[9]利用LBP和HOG特征实现了绝缘子的定位和检测。
针对待检测图像,基于积分图方法描述图像旋转不变LBP(rotation invariant local binary pattern)与HOG(histogram of oriented gradients)的融合特征和支持向量机,采用多尺度滑动窗口检测旋转双耳,实现旋转双耳定位识别;采用圆弧检测实现旋转双耳销钉准确定位;利用环形对称Gabor变换(circularly symmetrical Gabor transform, CSGT)完成销钉图片纹理边缘信息的特征提取,最后结合BP神经网络实现对旋转双耳销钉穿插状态的判断识别。该检测方法的流程图如图1所示。
1 旋转双耳识别及销钉定位
旋转双耳的定位识别可分为样本训练和定位识别两个阶段。样本训练主要利用特征提取算法计算正负样本两类的融合特征,训练线性支持向量机(SVM)分类器。定位识别主要采用多尺度检测方法以及窗口合并,实现对不同大小旋转双耳的定位识别。
1.1 旋转不变LBP特征
LBP是一种能够有效度量和提取图像局部纹理信息的算子,具有旋转不变性和灰度不变性等显著优点[10]。由于具有对光照不敏感的特性,是纹理和人脸识别中一种重要的特征提取方法[11]。原始的LBP算子定义为在3×3的窗口内,以窗口中心点gc处的像素为阈值,将相邻的8个像素的灰度值与其进行比较,若相邻像素值大于或等于中心像素值,则该标记为1,否则为0。相邻域内8个点经过比较可产生8位二进制数,转换为十进制数即LBP码,共有256种。

图1 销钉穿插状态判别流程图
(1)
改进后的圆形LBP允许在半径为R的圆形邻域内有任意多个采样点,当采样点坐标为非整数时,参考邻域4个整数坐标处灰度值,采用线性插值计算该采样点灰度值。为了去除旋转对LBP值所产生的影响,获得唯一LBP值,定义旋转不变LBP算子如下:
LBP(gc)=min(ROR(LBP(gc),i))
(2)
式中ROR(LBP(gc),i)代表将LBP二进制模式按照顺时针方向移位i次,找到最小LBP值,即为旋转不变LBP算子[12]。对于8个采样点,有36种旋转不变LBP模式。
1.2 HOG特征
HOG即梯度方向直方图特征,是一种针对图像局部重叠区域的描述符, 它通过计算局部区域的梯度方向直方图来构成特征[13]。HOG特征提取的过程包括:每一个检测窗口划分成若干个细胞单元(cell),相邻4个细胞单元组成1个块(block),块与块之间可以相互重叠。针对每个细胞单元中的像素点I(x,y),利用如下公式计算梯度大小m(x,y)和方向θ(x,y):
dx=I(x+1,y)-I(x-1,y)
(3)
dy=I(x,y+1)-I(x,y-1)
(4)
(5)
(6)
对每一个块中的特征进行直方图归一化,消除光照变化带来的影响。
(7)
式中:v为未归一化处理的特征向量;υnorm为归一化处理后的特征向量;‖υ‖2为v的二范数;无穷小量ε防止分母为0,所有块的特征向量连接在一起即为检测窗口HOG特征。根据文献[14]中实验证明,将360°分为9个梯度方向,即每个梯度方向为20°时检测效果较好。
1.3 训练线性支持向量机及旋转双耳定位识别
支持向量机是利用正负样本数据,寻找满足分类间隔最大的超平面,可在小样本提供的有限特征数据下寻找最优分类结果。支持向量机将不能线性分离的数据通过特定的非线性映射函数投影到某个高维特征空间中,在此高维空间寻找一个最佳超平面,使样本分类可以满足类间间隔最大[15]。
正负样本剪切于接触网支撑与悬挂装置高清图像,样本尺寸统一缩放为128×64,正负样本如图2和图3所示。样本HOG特征描述时,将图像划分为8×8的cell,2×2个cell组成一个block,每个cell取9个方向描述特征,1个block包含4×9=36维特征向量,HOG特征为15×7×36=3 780维向量。样本旋转不变LBP特征描述时,选择圆形LBP描述算子,取半径R=2,采样数P=8。1个block统计特征向量为36维,旋转不变LBP特征为15×7×36=3 780维向量。正负样本旋转不变LBP与HOG的融合特征向量维数为7 560,利用所有正负样本进行训练线性支持向量机,得到训练后的模型。

图2 正样本

图3 负样本
在检测图像中是否含有旋转双耳时,采用积分图的方法描述图像旋转不变LBP特征和HOG特征,检测窗口大小设置为128×64,检测过程采用多尺度滑动窗口扫描,滑动步长为8,通过合并检测结果中同类窗口完成旋转双耳最终定位识别,旋转双耳检测结果如图4所示。
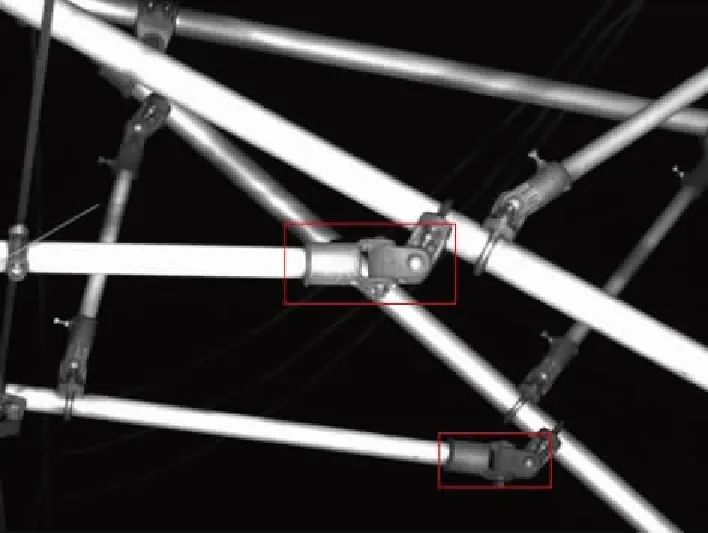
图4 检测结果图
1.4 旋转双耳销钉区域定位识别
首先将旋转双耳区域图片尺寸统一缩放为640×320,对图像预处理后利用Canny算子对旋转双耳图像进行边缘信息的提取,采用圆弧检测的方法实现销钉的准确定位。设定圆弧半径范围为(15,25),可在旋转双耳正面图像中检测出包含销钉在内的3个圆弧,通过圆弧间的相对位置关系可以准确定位销钉圆弧位置。以圆弧中心位置为中心点,以80×80尺寸剪裁得到双耳配合处销钉准确定位图片,销钉识别定位过程如图5所示。
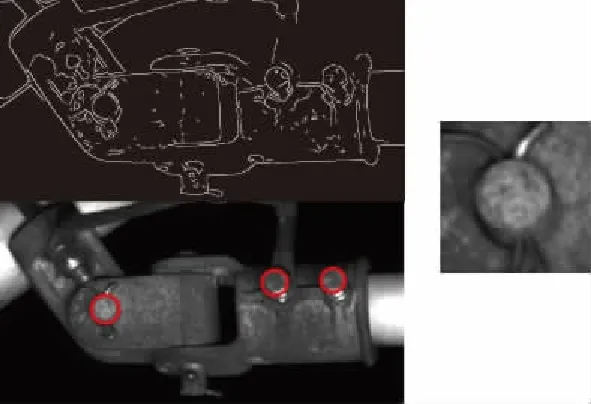
图5 销钉定位结果
2 基于环形对称Gabor和BP神经网络的销钉穿插状态检测
旋转双耳配合处销钉背景为耳片,此处销钉穿插虽然具有相似的形状结构,但穿插角度不固定,在销钉穿插状态检测中不能使用传统的水平或竖直灰度投影的方法。基于环形对称Gabor提取销钉图片特征,利用BP神经网络实现销钉穿插正常、松脱及缺失状态检测,销钉穿插的3种状态如图6所示。

图6 销钉穿插3种状态图
2.1 环形对称Gabor变换
Gabor小波可以近似地模仿人眼视觉识别机制,实现多尺度和多方向的描述能力。传统的Gabor函数中的方向选择是离散的,不具有旋转不变性。待识别的图像中特征具有的方向和角度是不确定的。为了对图像特征进行更全面的描述,采用环形对称Gabor变换进行特征提取,文献[16]中将环形对称Gabor变换应用到人脸识别领域并取得理想效果。环形对称Gabor变换是忽略式中方向参数,表达式如下:
(8)

为了使窗口函数大小适应尺度大小,降低卷积时的计算量,可以根据窗口的大小选择合适的模板以适应各不同尺度。σ/kν决定高斯窗口宽度的大小,文献[17]取r=floor(nσ/kν),n可取2,3,4等的方法确定模板的边长为2r+1。选择ν∈{0,1,2,3,4},n=2,即在5个尺度下选择模板r=floor(2σ/kν)对图像进行环形对称Gabor变换。保证模板可以覆盖窗口函数的主要信息,提高特征提取时的效率。图7为环形对称Gabor变换的5个尺度幅值图像。

图7 环形对称Gabor的 5个尺度幅值图像
2.2 BP神经网络
在故障识别分类中,采用机器学习算法中的人工神经网络。本文使用BP神经网络,由包含1个输入层、1个输出层和1个或者多个隐层的神经网络组成,相邻层之间的神经元为全连接,同一层之间的神经元无连接。训练方法采用BP算法,其核心思想是基于误差反向传播对权重矩阵进行校正。在实际输出值与期望值输出不同时,会不断修正权值,对网络进行校正。
在神经网络设计中,隐层节点数少会导致网络学习能力差,隐层节点数多容易导致缺乏记忆主要信息的能力,混入大量非规律的次要信息[18]。多隐层的网络相对单隐层网络具有相对较强的学习能力,合理设计神经网络和选取学习速率等训练参数十分重要。选择学习速率的初始值范围一般为(0.01,0.8),节点个数可取经验公式:
(9)
式中:n为输入层神经元个数;m为输出层神经元个数;p为隐层神经元个数;a为修正常数。
2.3 特征融合及BP神经网络设计
利用环形对称Gabor变换对图像进行特征处理后,将幅值最大值、幅值最小值和幅值平均图进行融合,可以突出表达旋转双耳销钉纹理信息,边缘对比度较大,特征信息较明显。原始旋转双耳销钉图片尺寸相对较大,本文选择将销钉图片尺寸分别缩放为10×10、15×15、20×20、25×25和30×30进行测试训练。训练过程选用60张穿插正常状态、80张穿插松脱状态、60张穿插缺失状态样本3类融合特征图训练BP神经网络,利用环形对称Gabor变换对销钉穿插正常状态图像进行特征提取后的结果如图8所示。
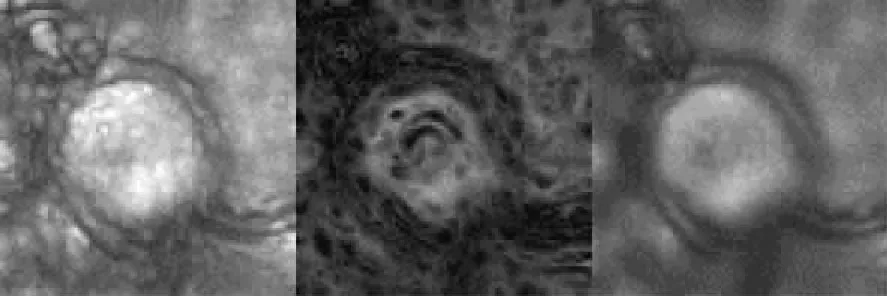
图8 销钉穿插正常状态特征图
实验证明选择图片尺寸为15×15结合使用双隐层BP神经网络模型时有较好的分类识别结果,学习速率取0.03。BP神经网络输入层神经元数量为675,输出层神经元数量为3;根据经验公式和实验,第1层隐含层神经元数量取20,第2层隐含层神经元数量取为10。
3 检测结果
在Microsoft Visual C++下基于OpenCV图像处理平台利用本文提出方法,对43张来自C4接触网检测系统采集到的接触网支持与悬挂装置现场高清图像进行实验验证。实验结果如表1所示。

表1 接触网旋转双耳定位识别结果
利用40张旋转双耳高清图像进行实验验证,基于圆弧检测正确定位38张图片的销定区域,漏检2张,具有较高的定位精度。
利用旋转双耳销钉样本对训练模型进行验证,其中0代表正常样本,1代表松脱样本,2代表缺失样本,实验结果如表2所示(表中“—”表示数据不存在)。

表2 销钉状态判别结果
分析实验结果可知,定位算法针对旋转双耳检测具有较高的定位识别精度,能够定位识别正反面及不同尺度下的旋转双耳。在检测图像背景干扰较小,只包含单个旋转双耳时具有检测精度高的优点;在包含2个旋转双耳时具有较高的检测精度,漏检是由于相机拍摄角度导致未检测到的旋转双耳与后面接触网支持与悬挂装置中绝缘子与腕臂部分存在较大重叠与干扰,影响检测结果;对于不包含旋转双耳的其他接触网支持与悬挂装置图像无漏检和误检。模型针对旋转双耳销钉穿插的3种状态整体有较好的识别分类效果,其中对穿插缺失状态正确判别率为96.78%,具有很高的识别率。对穿插松脱状态的正确判别率虽然只有86.67%,但基本全部误判为穿插缺失。对穿插正常状态正确判别率为90.32%,具有较高的识别率。分析误检情况的图片,存在不清晰等问题,进行特征提取时不能很好地表达纹理边缘信息。
4 结语
实验结果表明,检测方法在较复杂的背景干扰下可实现旋转双耳正反面及不同尺度下的定位识别,利用圆弧精定位旋转双耳销钉以及BP神经网络判别穿插状态具有较高的识别精度。本文对接触网支持与悬挂装置零部件定位识别进行了有益的研究,在实现接触网关键零部件故障缺陷智能识别方面进行了尝试。
