多轴串联式混合动力车辆参数匹配研究
2020-04-22白锦洋李洪彪吴学雷罗小江
杨 波,白锦洋,李洪彪,吴学雷,罗小江
多轴串联式混合动力车辆参数匹配研究
杨 波,白锦洋,李洪彪,吴学雷,罗小江
(北京航天发射技术研究所,北京,100076)
以串联式混合动力多轴重型特种车辆为研究对象,混动参数匹配的合理性决定了车辆动力源潜能的发挥、机电子系统之间的协同程度以及动力性、经济型、可靠性等关键技术指标满足要求。为了提升车辆的综合性能,需要在初始设计阶段对车辆关键子系统进行匹配优化设计。结合国内外研究经验,从性能需求层面出发,对车辆边界约束条件进行计算分析,优化车辆重要混动参数,形成了车辆混动参数匹配优化模型,提升匹配过程的精准性。最后,通过典型循环工况仿真验证,证明了该参数匹配方法的合理性。
多轴车辆;串联式混合动力;参数匹配;区域转速比
0 引 言
混合动力车辆在结构方面可以分为串联式、并联式、混联式3种[1,2]。串联式混合动力结构中,发动机与驱动轴完全机械解耦,使得整车布置更加灵活[3];驱动系统采用纯电驱动模式,避免了机械与电力功率切换的工况,使得控制策略更加简单、可靠[4]。本文将对串联式混合动力汽车的参数匹配方面内容展开研究。
车辆参数匹配直接影响整车的动力性、燃油经济性、排放特性、制造成本、整体质量等,动力系统参数匹配的优化是混合动力车辆研究的关键技术之一[5~7]。文献[8]中,借助仿真分析的方法,按照发动机功率、电动机功率、转速转矩范围、传动系速比电池功率及容量的顺序,以发动机工作于经济区间为准则进行了各元件参数的匹配,并通过仿真运算,验证了匹配结果的合理性。但匹配过程侧重点为发动机与蓄电池的协调,未涉及驱动电机的匹配计算;文献[9]中,全面地考虑了各部件的选型,以插电式并联混合动力汽车动力为研究对象,采用正交试验设计方法,以汽车行驶工况油耗最小为目标,优选出动力传动系统各部件参数的优化匹配方案,经过动力性和燃油经济性仿真,得到了5.58%的节油效果。虽然文中的正交试验法实现了对各重要参数的优化,但文中对各参数的约束范围描述较为模糊,仍需进一步挖掘内在的数学本质。文献[10]中,借助了数学拟合的方法,采用指数函数对车辆起步加速过程进行拟合,很好地模仿了车辆起步加速过程的变加速度状态,精确化了起步过程所需的功率。该方法非常值得借鉴,对于串联式混合动力车辆来说,起步加速过程的关键限制因素为驱动电机的转矩特性以及动力系统可提供的总功率,在进行动力系统和驱动系统匹配时应进行考虑。
本文利用数学推导,分析了电机特性参数对传动系统的影响,建立了电机功率及电机区域速比与车辆性能之间的关系,按照车辆典型行驶工况需求、电机特性参数、发动机特性参数、发电机特性参数、电池特性参数依次进行系统参数的合理匹配与优化。
1 传动系统结构与基本设计要求
本文研究对象的结构如图1所示,发动机的机械能通过联轴器传递给发电机,发电机将机械能转换为电能,经由高压配电箱供给驱动电机驱动车辆,或供给电池组充电。电池组与高压配电箱相连联,可供给驱动电机驱动车辆,也可吸收由驱动电机回收的制动能量。车辆采用轮边驱动的方案,驱动电机经减速器,与驱动轮相连。车辆动力传动系统的运行模式可分为:a)APU(由发动机与发电机共同组成)单独驱动车辆;b)电池组单独驱动车辆;c)APU与电池组共同驱动车辆;d)行车充电模式;e)制动能量回收模式。

图1 型串联式混合动力车辆结构示意
通过对上述5种模式的合理切换、合理控制以及对车辆参数的合理匹配,可以实现车辆的起步加速要求、定速巡航要求、最高车速要求、爬坡能力要求以及经济节油等性能方面的要求。
研究车辆基础参数如表1所示,本文将依据改参数与要求对动力系统的关键部件进行匹配。
表1 车辆基础参数
Tab.1 Vehicle Basic Parameters
参数名称数值 整车质量m/kg30000 迎风面积A/m26 风阻系数CD0.8 最大车速Vmax/(km·h-1)120
续表1

参数名称数值 最大爬坡车速Vp/(km·h-1)10 最大爬坡度θ30% 0~60km/h加速时间/s6 地面阻力系数f0.015 旋转质量换算系数δ1.1
2 驱动电机参数设计
从图1可以看出,驱动电机是车辆的唯一驱动元件,驱动电机的功率、转速转矩关系等性能将直接影响车辆的加速能力、最大车速等关键动力性能。
通常情况下,电机外特性曲线中,会包含两个明显的分区,如图2所示。
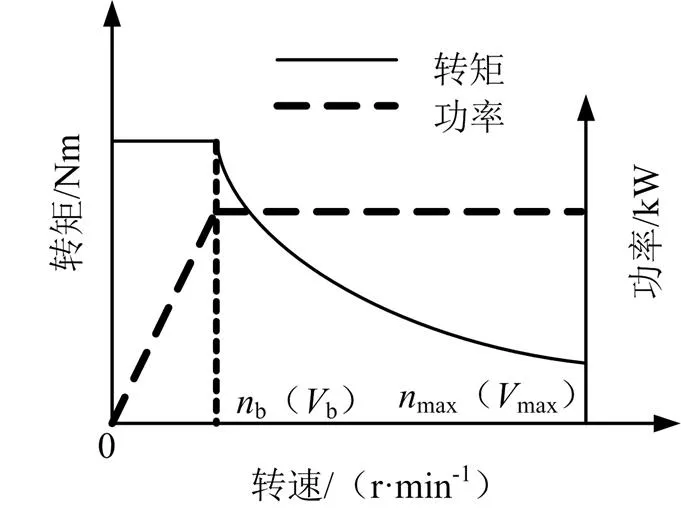
图2 电机转速转矩关系特性
当电机速度较低时,电机最大输出转矩恒定,此区域为恒转矩区;当电机转速较高时,电机输出功率恒定,此区域为恒功率区。恒转矩区向恒功率区转变的转速可称为基速b,对应的车速为b;电机的最大转速为max,对应的车速为最大车速max。定义=max/b为电机的区域转速比,显然,电机的外特性由其额定功率和区域转速比共同决定。
2.1 加速性能对驱动电机的需求设计


a)车辆行驶于水平路面;b)路面滚动系数为0;c)空气阻力系数为0。
通过后面的求解过程将可以看出,以上的假设对问题的分析并不会产生本质的影响。随后,本文也会放宽假设条件,给出微分方程的数值解。
通过以上假设,式(3)可以进一步化简为
由式(4)经过换项可以得出:

对等式(5)两边同时进行积分可得:
为了车辆能以最大能力加速,令车辆起步加速过程中,电机按外特性输出功率。那么,式(6)的左侧,可以依据图2进一步拆分为恒转矩部分与恒功率部分之和,如式(7)所示:


从式(8)中可以清晰地看出,电机区域速比越大,车辆在加速过程中所需要的电机功率越小。
图3为有阻力和无阻力时,驱动电机需求功率随区域速比变化的情况,从图3中可以看出随着速比的增加,需求功率减小的幅度逐渐降低,因此,在选择电机时,需要对电机最大扭矩与区域速比进行合理的配置。图4为不同区域速比与不同驱动电机功率下,车辆起步加速工况所需时间的状态。当速比与功率同时较大时,加速时间自然很短,所以图4中并未对此进行描述。图4中主要对速比增大、功率减小时,加速时间进行描述,从图4中可以看出,速比与电机功率合理的配合,可以得到最短的加速时间。

图3 车辆起步加速过程需求功率随区域速比变化曲线

图4 不同区域速比与不同电机功率下车辆加速状态
2.2 爬坡性能对驱动电机的需求设计
假设车辆以固定车速爬坡,依据汽车理论知识,车辆在爬坡过程中,受到的阻力可由式(1)得出。取不同区域速比、不同电机功率,绘制车辆的牵引力曲线,与不同坡度的路面阻力进行比较,可以得出不同状态下,车辆的爬坡能力,如图5所示,即使电机功率降低,但爬坡能力依然随区域速比的增加而增加,在电机功率减小到某一限值以后,爬坡能力随区域速比的变化较小。当固定车辆的爬坡能力时,电机需求功率随速比的变化如图6所示。

图5 不同区域速比、电机功率下车辆需求驱动力与路面阻力对比曲线
从图6中可以看出,在速比较低范围内,电机功率随速比的减小增加很大,但当速比处于较大区域时,需求功率随速比增加而降低较小,为此,需要选择合理的速比与功率配置,以兼顾电机的尺寸与爬坡性能。

图6 相同爬坡能力下,不同区域速比对应的功率需求
2.3 最大车速对电机需求设计
车辆最高车速对应的需求功率可由式(9)计算得到。通常情况下,车辆最高车速对电机功率的需求会小于车辆加速能力与车辆爬坡能力对电机功率的需求。车辆最高车速的限制,主要体现在电机最高转速与轮边减速器的减速比上。

3 发动机功率设计


4 发电机功率设计
发电机的作用是将发动机的机械能转化为电能,其功率大小应当与发动机功率大小匹配,保证在发动机全速度范围内,发挥出发动机的最大能量,即发电机的外特性曲线应当尽量包络发动机的外特性曲线。因此,发电机功率应当大于或等于发动机的额定功率。
在发电机的最高转速方面,若采用增速箱连接,可以适当放宽发电机的转速区域。当增速箱转速过高时,由于齿轮与轴承的加工精度问题,会产生较大的震动问题,对增速箱的强度造成影响,因此,发电机的最大转速不宜过高,从工程经验出发,最高转速在6000 r/min以下为宜[13]。
图7为不同增速比下,发动机的特性曲线,当增速比增加时,发动机的最大转矩逐渐降低,发电机包络发动机外特性的能力增强。发电机的尺寸与发电机的额定转矩关联较大,转矩越大,发电机尺寸越大,因此,在实际选型过程中,应当依据动力单元的尺寸限制,对发电机额定转矩进行限制,进一步可依据图7得到增速箱的增速比。

图7 不同增速比下发动机特性曲线
5 电池组容量设计
电池容量大小主要依据以下边界条件进行选型设计:
a)静默行驶里程限制;
b)车辆最大功率与发动机功率限制;
c)制动能量回收限制;
d)车辆结构布局空间及整车质量的限制。

串联式混合动力车辆电池组具备辅助动力单元输出功率的作用,即在车辆需求功率大于动力单元输出功率时,不足部分功率电池组提供。该功率限制可由爬坡功率、最高车速功率、加速功率三者较大者与式(10)相减得到。
制动能量回收模式可以对应于车辆的多种减速工况,在该模式下,驱动电机将作为发电机使用,回收车辆的制动能量,将能量储存在电池组中。在某些长坡工况,需要回收的能量较多,电池组的容量应当大于这一回收能量。在绝大多数情况下,此能量远小于静默行驶所需能量,因此该设计条件的优先级较低。
6 仿真及试验验证
根据多轴重型特种车辆的需求特点,以动力性为匹配目标,按照上述方法,得到本文研究对象的参数计算结果如表2所示。
表2 车辆的匹配参数
Tab.2 Research Object Parameters
参数名称数值 驱动电机总功率/kW400 区域速比x3 发动机功率/kW300 发电机功率/kW300 电池组容量/(kW·h)170 电池组功率/kW200
采用硬件在环试验台架对匹配结果进行验证,试验台架布置如图8、图9所示。其中,动力系统控制器APCU采用发动力优先输出动力、总输出功率跟随需求功率的控制策略,驱动电机控制器MCU采用力矩平均分配的控制策略。
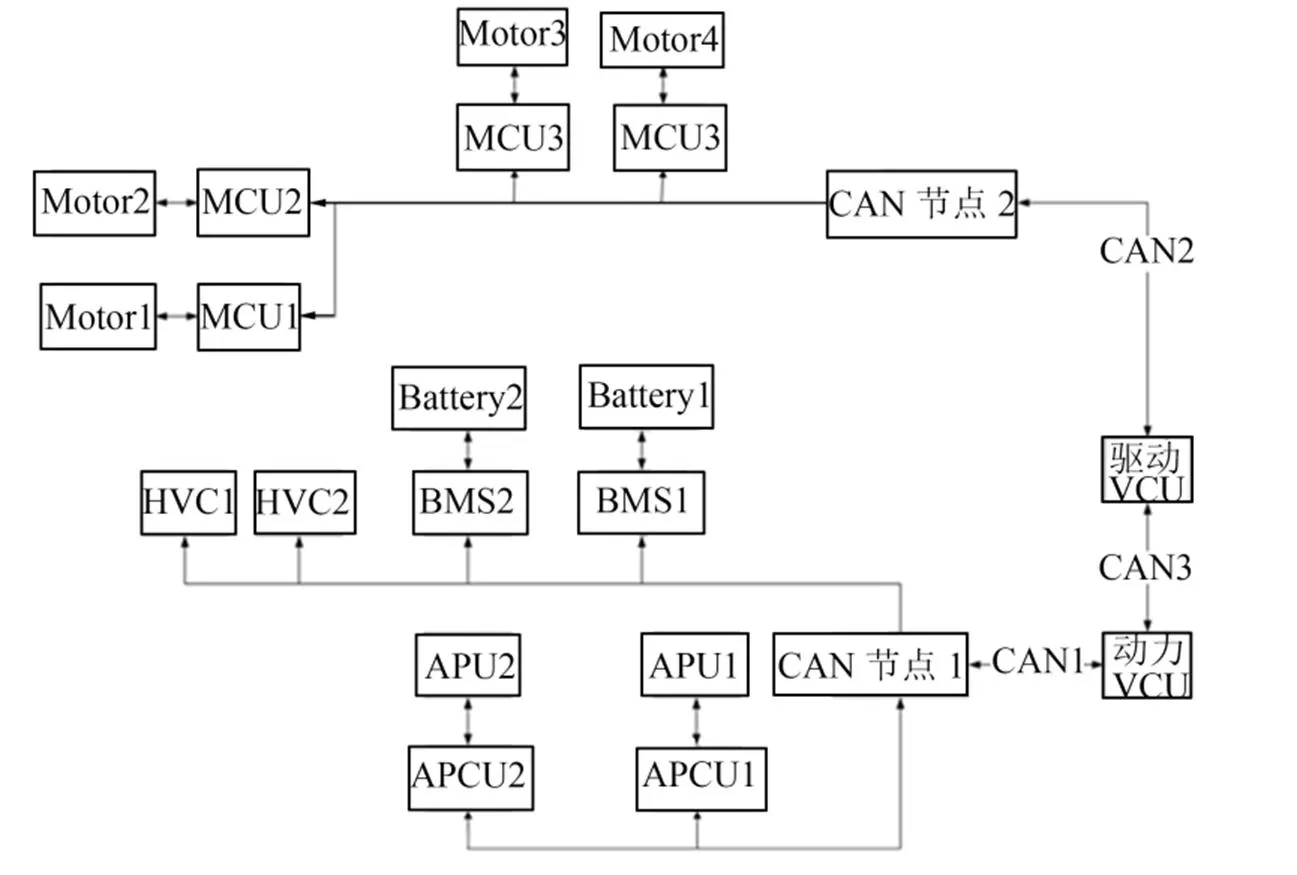
图8 硬件在环试验台架布置

图9 硬件在环测试平台
采用NEDC(新标欧洲循环测试)的循环工况(见图10)以及高速路循环工况(见图11)对匹配的合理性进行试验验证[16]。
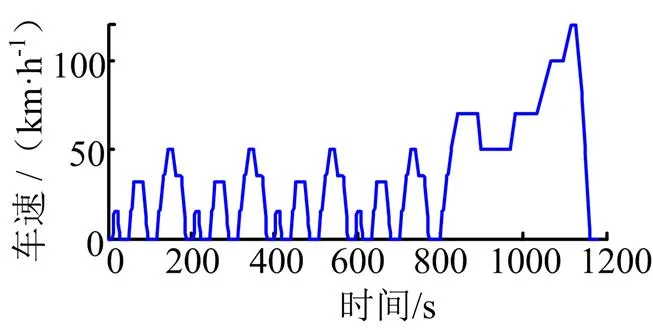
图10 NEDC循环工况

图11 高速路循环工况
在循环工况中,车辆的需求功率与试验功率分别如图12、图13所示。
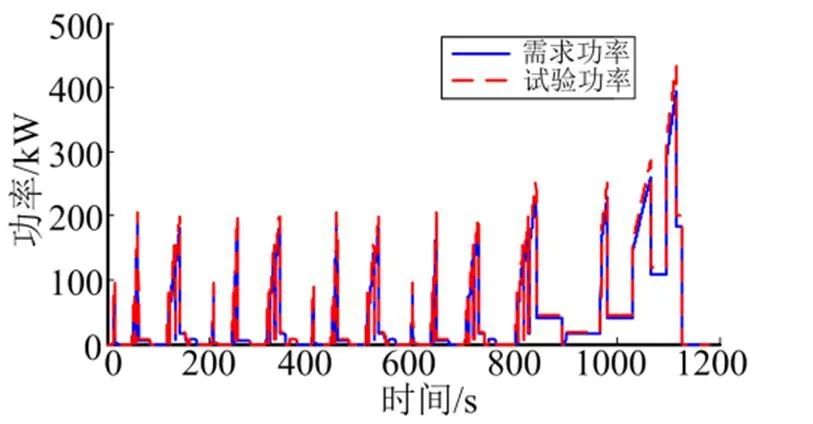
图12 NEDC循环工况下车辆需求功率曲线

图13 高速路循环工况下车辆需求功率曲线
从图12、图13中可以得出,两种工况下,试验功率可以覆盖需求功率,证明发动机与电池功率匹配可以满足整车动力性需求。
对其进行统计处理,可以得到图14所示的循环工况功率需求概率分布图。可见,发动机功率均可以覆盖90%左右的常用功率,与上文中发动机功率的设计标准相吻合,因此,可以证明发动机功率匹配合理。
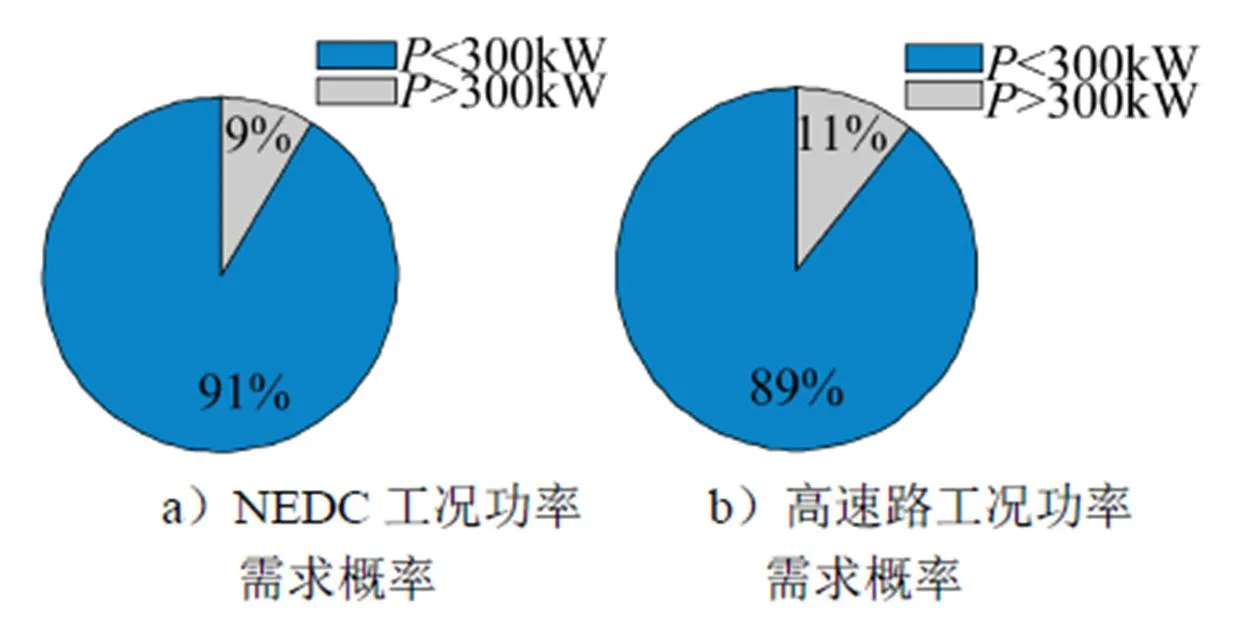
图14 各循环工况下车辆需求功率的概率
车辆的驱动力需求如图15、图16所示,从图15、图16所示可以看出,试验工况中电机提供的驱动力可以覆盖理论驱动力需求。

图15 NEDC循环工况需求动力与试验电机提供动力曲线
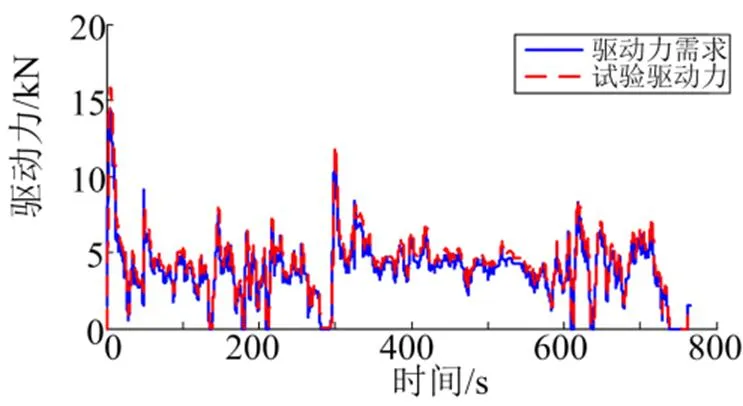
图16 高速路循环工况需求动力与试验电机提供动力曲线
图17、图18给出了两种工况下需求动力与电机可提供动力曲线。
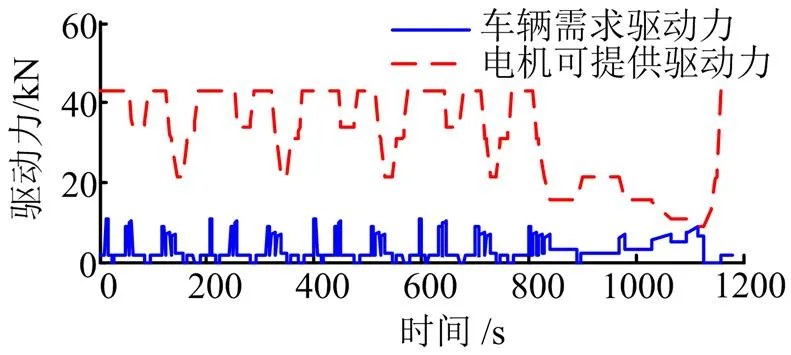
图17 NEDC循环工况需求动力与电机可提供动力曲线
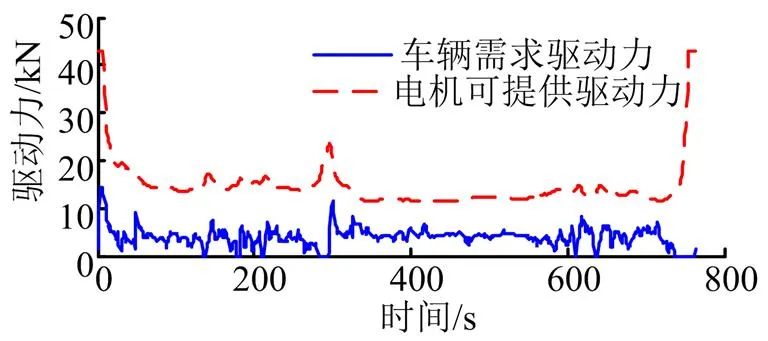
图18 高速路循环工况需求动力与电机可提供动力曲线
从图17、图18可以看出,任意车速的需求驱动力均小于此时电机可提供最大驱动力,证明驱动能力可以满足需求。从图17可见,在=1115 s时,车辆到达最大车速,电机可提供的驱动力最小,此时电机可供动力依然大于车辆需求动力,而且二者之差很小,没有过多的功率冗余,证明了电机匹配的合理性。从图18可见,在整个循环工况中,电机可供驱动力在大范围内高出需求驱动力较多,造成资源浪费。为此,可以在控制策略中加入电机个数选择模块,在低驱动需求时,启动少数电机,在高驱动需求时启动多数电机,实现高效率驱动的目的。
7 结 论
参数匹配是车辆所有性能的基础,匹配合理可以发挥出各部件的最优性能。在合理的控制策略引领下,各部件协调工作,实现车辆的高效运行。本文分析了电机特性参数对传动系统的影响,建立了电机功率、电机区速比与动力性能之间的关系,按照车辆动力性需求,对驱动电机进行了匹配。然后,在此基础上,对发动机、发电机、电池组分别进行了功率匹配。经过典型循环工况仿真,验证了参数匹配的合理性。通过上述研究,本文主要得出以下结论:
a)驱动电机的区域转速比与车辆的动力性具有紧密的联系,在同等功率下,区域转速比越大车辆加速性能、爬坡性能会越好。但是,当区域转速比增大到某一范围后,其对车辆性能的影响会逐渐减弱。
b)纯电驱动车辆的全部驱动力来自驱动电机,因此驱动电机的参数对车辆性能的影响最为直接。整车参数匹配过程中,应当首先对驱动电机进行匹配,然后,依据电机的具体特性,依次对其它部件进行匹配;
c)文中阐述了车辆动力系统以及驱动系统主要部件匹配的具体方法,以本文8×8型多轴混合动力车辆为例,设计了关键部件的具体参数。通过对典型工况的仿真,验证了参数匹配的合理性和本文所述方法的有效性,对车辆的正向设计起到指导性作用。
[1] 刘旭东, 等. 基于模糊逻辑的SHEV控制策略设计与仿真[J]. 北京工业大学学报, 2012, 38(3):363-368.
Liu Xudong, et al. Design and simulation of fuzzy logic control strategy for an shev[J]. Journal of Beijing University of Technology, 2012, 38(3): 363-368.
[2] 李玮, 段建民. 串联式混合动力汽车起-停巡航控制[J]. 北京工业大学学报, 2011, 37(9): 1317-1324.
Li Wei, Duan Jianmin . Stop and go cruise control on series hybrid electric vehicle[J]. Journal of Beijing University of Technology, 2011, 37(9): 1317-1324.
[3] 陈龙, 等. 基于在线ECMS的混合动力公交车能量管理策略优化与HIL仿真[J]. 汽车工程, 2016, 38(10): 1163-1168.
Chen Long, et al. Optimization and HIL simulation of energy management strategy for hybrid electric bus based on online ECMS[J]. Automotive Engineering, 2016, 38(10): 1163-1168.
[4] 林歆悠, 等. 基于随机动态规划的混联式混合动力客车能量管理策略[J].汽车工程, 2012(9): 830-836.
Lin Xinyou, et al. The Energy management strategy for a series-parallel hybrid electric bus based on stochastic dynamic programming[J]. Automotive Engineering, 2012(9): 830-836.
[5] Hu M, Xie H, Fu C. Study on EV transmission system parameter design based on vehicle dynamic performance[J]. International Journal of Electric and Hybrid Vehicles, 2014, 6(2): 133-151.
[6] 潘筱, 等. 基于遗传算法的汽车平顺性和操纵稳定性优化[J]. 北京工业大学学报, 2012, 38(11):1638-1642.
Pan Xiao, et al. Optimization study on the vehicle handing stabiling and ride comfort using genetic algorithm method[J]. Journal of Beijing University of Technology, 2012, 38(11): 1638-1642.
[7] Saijad F, Francis A. The role and use of robust multivariable control in hybrid electric vehicle energy management-part i: an overview[C]. Dubrovnik: IEEE International Conference on Control Applications, 2012.
[8] Gao Y, Ehsani M. Parametric design of the traction motor and energy storage for series hybrid off-road and military vehicles[J]. IEEE Transactions on Power electronics, 2006, 21(3): 749-755.
[9] Zeng X, et al. Multi-factor integrated parametric design of power-split hybrid electric bus[J]. Journal of Cleaner Production, 2016(115): 88-100.
[10] Ribau J, et al. A new offline optimization approach for designing a fuel cell hybrid bus[J]. Transportation Research Part C: Emerging Technologies, 2014(42): 14-27.
[11] Yoshimura, Toshio. Design of a simplified adaptive fuzzy backstepping control for uncertain discrete-time nonlinear systems[J]. International Journal of Systems Science, 2015, 46(5): 763-775.
[12] Tadic, et al. A novel hybrid MCDM model based on fuzzy DEMATEL, fuzzy ANP and fuzzy VIKOR for city logistics concept selection[J]. Expert Systems with Applications, 2014, 18(41), 8112-8128.
[13] Nema K, et al. Identification of two-input two-output process using state-space analysis [J]. Iet Control Theory and Applications, 2015, 13(9): 2029-2038.
[14] Roy I, Robert D. Engine torque ripple cancellation with an integrated starter alternator in a hybrid electric vehicle: implementation and control[J]. IEEE Transactions on Industry Application, 2003, 96(6): 1765-1774.
[15] Cheng A S (Ed), et al. Investigation of methyl decanoate combustion in an optical direct-injection diesel engine[J]. Energy & Fuels, 2014, 28(12): 3107-3115.
[16] Wu Dan, Zhou Rui, Liu Meng. Numerical investigation of the stability of rotating detonation engines[J]. Combustion Science and Technology, 2014, 108(10-11): 1699-1715.
Parameter Design of Multi-axis Series Hybrid Electric Vehicle
Yang Bo, Bai Jin-yang, Li Hong-biao, Wu Xue-lei, Luo Xiao-jiang
(Beijing Institute of Space Launch Technology, Beijing, 100076)
The series hybrid multi-axis heavy-duty special vehicle is focused. The rationality of hybrid power parameter matching determines the potential of vehicle power source, the degree of synergy between electromechanical subsystems and key technical indicators such as power performance, economy and reliability meeting the requirements. In order to improve overall performance of the vehicle, it is necessary to optimize the subsystems in the initial design stage. Based on the research experience at home and abroad, the vehicle boundary constraints from the performance requirements are calculated and analyzed, the important parameters of the vehicle are optimized, and a reasonable matching system is formed for the hybrid electric vehicle parameters to improve the accuracy of matching results. Finally, the rationality of the parameters matching method is proved by the typical cyclic condition simulation.
multi-axis vehicle; series hybrid electric vehicle; parameter design; extended speed ratio
U462
A
1004-7182(2020)02-0087-07
10.7654/j.issn.1004-7182.20200218
杨 波(1982-),男,博士研究生,研究员,主要研究方向为特种车辆底盘技术。
白锦洋(1988-),男,博士研究生,工程师,主要研究方向为特种车辆底盘技术。
李洪彪(1979-),男,研究员,主要研究方向为特种车辆底盘技术。
吴学雷(1965-),男,研究员,主要研究方向为特种车辆底盘技术。
罗小江(1981-),男,高级工程师,主要研究方向为特种车辆底盘技术。
2018-09-07;
2018-12-16
