基于MATLAB 的光伏并网最大功率跟踪控制技术研究
2020-04-21张晓霞
张晓霞
(甘肃机电职业技术学院,甘肃 天水 741000)
0 引 言
在利用分布式光伏能源时,首先要做的是通过光伏组件来将光能源转换为电能;其次为了达到并网要求,对电能进行转换,然后并入电网。为了最大限度的利用光伏能源,需要最大功率跟踪(MPPT)环节[1]。图1 为较早的双极式光伏并网系统。

图1 传统双极式光伏并网系统结构
在此系统中共有两个能量转换环节,DC/DC 和DC/AC。前面直流侧DC/DC 变换主要起光伏电池MPPT的作用,后面DC/AC 逆变电路完成直流电向交流电的转换。
1 最大功率跟踪控制
1.1 MPPT 简述
在图2 中,光伏输出曲线是单峰形P-V曲线,曲线中Pmpp为单一最大值点。当温度与光强度为定值时,输出电压达到某一指定值时,光伏电池的输出功率就达到极大值,这个点称为最大功率点(MPP),也是输出电压和电流的最优结合点。一般MPPT 在光伏发电系统中扮演着重要的角色,其控制方式对光伏电池的输出效率有直接影响[2]。
1.2 MPPT 原理
一个基本的光伏MPPT 系统由光伏组件和一个可变负载构成,如图3 所示。
在图3 中,光伏组件直接连接到可变负荷,因此光伏组件的输出电压(Vpv)和输出电流(Ipv)分别与可变负荷的电压(Vload)和电流(Iload)相等。通常情况下,当可变负荷(Rload)的阻值发生变化时,光伏组件的等效电阻Rpv也会发生变化。当Rload达到理想值时,工作点将移到最大功率点,以满足光伏组件的最大发电效率。但在实际应用中,Rload通常是一段时间内的不可变值,直接调整负荷阻值是不可行的,为此可以接入一个DC/DC 变流器在光伏组件与负载之间,如图4 所示。

图2 光伏输出P-V 曲线

图3 光伏MPPT 系统
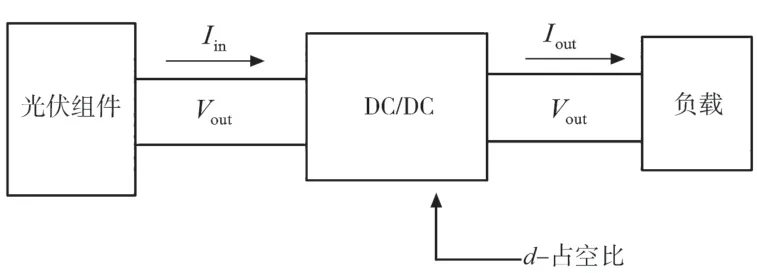
图4 接入DC/DC 的MPPT 系统
其中,DC/DC 的占空比为d。为方便计算,设电压变换比为M(d),则DC/DC 变换器输入输出电压关系表示如下:

通常,在实际运行过程中,对DC/DC 变换器的转换效率η也应该考虑,则有:

其中,Rin为等效输入电阻,Rout为等效输出电阻。
在光伏系统中,有Rpv=Rin和Rload=Rout,则式(2)可化为:

根据式(3),即使Rload是一个不变的值,只要DC/DC 的占空比d改变,仍可将工作点调解至最大功率点(MPP),如图5 所示。

图5 最大功率跟踪原理图
2 Boost 升压电路
在光伏并网发电系统中,通过DC/DC 来调节光伏MPPT 的占空比d。DC/DC 电路的作用是输出电压幅值恒定或电压幅值可控的直流电。本文中光伏系统的MPPT 通过Boost 电路来实现,Boost 电路的结构及原理简单、易与实现。
Boost 升压电路如图6 所示。

图6 Boost 升压电路
当开关管S 导通时,对电感L 充电,充电电流iL逐渐变大,电容C 为负荷提供工作电能;当开关管S关断时,负荷所消耗的电能是由电源和电感L 上的电压叠加提供的;当Boost 电路状态稳定时[3-4],其平均输出电压表示为:

其中,ton、toff为开关管导通、关断时间;T为开关周期;D为导通占空比(0 <D< 1);E和Vo分别为输入、输出电压[5]。电感电流连续的临界条件为:

图6 中,电路的输出电流I0、占空比D、滤波电容C和开关频率fs等因素共同决定输出纹波电压ΔVO的值,用公式(6)表示为:

3 MPPT 控制方法
常用的最大功率跟踪方法有如下3 种:恒压跟踪法、电导增量法、扰动观察法。其中指数变步长扰动观察法具有结构更简单,测量参数少、便于实现等特点,在工程中应用广泛的。
在扰动观察法中,扰动步长选取是否合理直接影响整个系统的跟踪精度和跟踪速度,本文中最大功率的跟踪选用变步长的方法来实现。在初始时刻,扰动步长取的较大,当接近最大功率点时,由于步长较大,直流端电压波动较大,此时,只能迅速减小扰动步长值,以减小直流端电压波动,使输出功率稳定在一个固定值。在传统的定步长扰动观察法中,电压增量ΔU为常数,即Uref=Uref+ΔU,在定步长扰动观察法的基础上引入了一个步长变化因子a,并且a与最大功率点距离成反比例关系。当远离MPP 时a的取值越大,则ΔUk=aΔU,反之则a的取值越小;当a的取值在(0,1)时,步长ΔU就不再是一个常数值,而是一个随着跟踪状态变化的量,应用此变量可保证最大功率追踪的跟踪精度和速率[3]。
MPPT 变步长如图7 所示。在远离MPP 时,步长取值较大,ΔP的增量也变大;在靠近MPP 时,要使步长变化到较小的区间内可以通过控制步长变化因子a实现,ΔP的增量也较小。通过ΔP的变化来实现对a值大小的实时调整。变步长扰动观察法的控制流程如图8 所示。

图7 MPPT 步长变化示意图
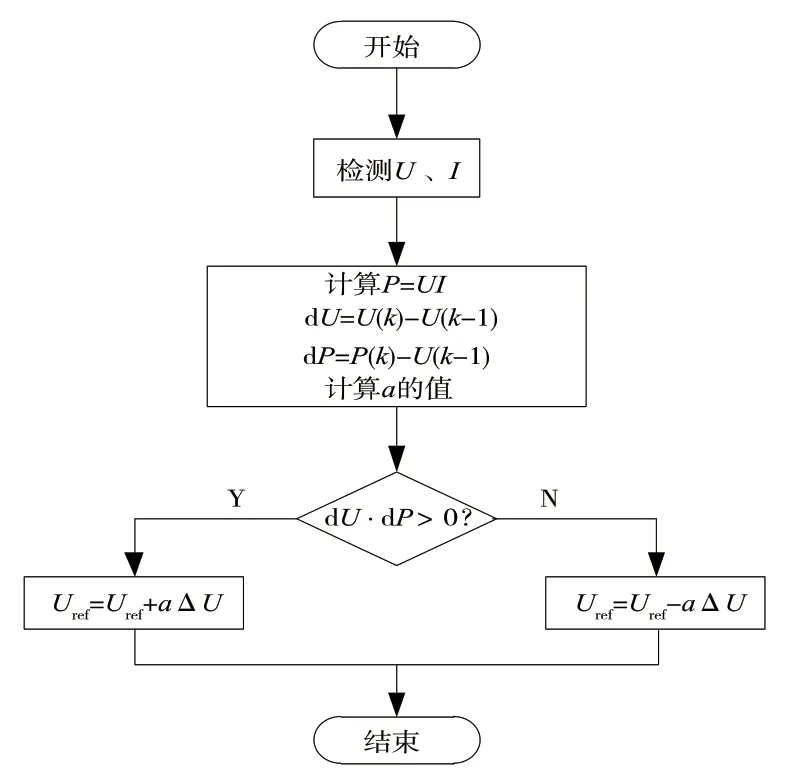
图8 变步长MPPT 流程图
4 MPPT 仿真分析
采用Matlab/Simulink建立的仿真模型的仿真波形,如图9 所示。
由仿真结果看出,在图(a)和图(b)中光照强度和环境温度均发生变化;图(c)和图(d)表示光伏系统输出的有功功率和输出电压波形,仿真波形表明,当光照变化时,所采用的MPPT 控制方法具有良好的追踪速率和较小的电压纹波,控制效果良好。

图9 MPPT 仿真波形图
5 结 论
最大功率点追踪一直是光伏发电技术的重点研究方向,本文提出来的基于变步长的扰动观察法,经仿真证明该方法能更稳定、准确地达到最大功率点,提高了控制精度。
