检测机器人支架开口闭口控制结构设计
2020-04-20赵淑娟


摘 要:斜拉索大桥服役于大气之中,不可避免的受到的来自于大气的锈蚀等作用,需定期检测其安全性。根据桥索的特点,检测机器人需要爬升長度、高度都有一定的要求。机器人作业时所有检测设备均应稳固在检测架上。本文主要从轻便性、简便性、稳定性和经济性等诸多因素考虑,对检测机器人支架开口闭口结构进行优化设计。
关键词:检测机器人;检测支架;开口闭口结构
斜拉桥缆索检测机器人主要用于检测室外服役的缆索等特殊装备。在实施检测作业中,检测机器人需要背负一定重量的检测机构在具有一定高度、斜度、长度、挠度的缆索上面前进、后退、停留。保证检测机器人在缆索上的稳定性、可靠性的运行与停留是完成检测任务的首要任务。所有检测设备是安装在检测机器人的检测架上,检测架再通过一定装置夹紧在缆索表面。检测架需要通过开口闭口结构的设计,便捷、稳固、可靠地完成检测机器人的夹装。
一、检测机器人支架开口闭口结构设计要求
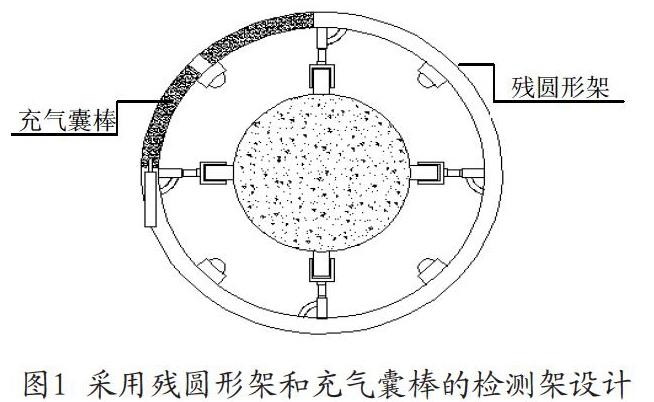
为避免检测机器人在实施作业时偏离预定轨迹或者颠簸爬行,得到比较理想的检测效果,不误检、漏检,首先就要很好地解决检测机器人本体结构,尤其是检测机器人检测架开口闭口结构设计,保证爬升机构顺利稳固在缆索表面。之前在对检测机器人支架的开口闭口结构进行设计时,曾使用残圆形架和充气囊棒等结构,如图1所示。
随着试验的不断进行发现,由于充气囊棒质量很轻,整个检测架构件在斜拉索上运行时,需要保持充气囊棒在下方才能保证较稳定的提速检测,如果充气囊棒在上方时,由于较重的残圆形架在下方,会造成下方的重量远大于上方,这就会在提速检测时由于重力的作用有脱缆的危险。所以,需要进一步将整个检测架开口开闭结构作出进一步的细化改进,保证检测架的重量分配更加均匀,能够并保持任何状态下的稳定提速。
二、机器人夹装装置的结构设计
根据上述设计思想、设计要求与经验反馈,使用充气囊棒与残圆形架的检测机器人支架具有简便、易于装拆和经济性的特点,本次结构优化设计主要解决的就是检测机器人支架开口闭口结构的配重问题。优化后检测架的开口闭口结构闭合使用时的结构如图2所示,打开使用状态结构如图3所示。优化后的检测支架的主体结构主要包括残圆形架、开口闭口控制结构、拔杆、弧形轨道机构等主要部件。
1.残圆形架
残圆形架为圆心角为N度的圆弧架体,根据被检测对象的直径等相关因素,经过反复试验后确定N的一个最佳的取值范围280度到300度之间。如果N小于280度就不能够实现四个行走轮机构的环形阵列;如果N大于300度,为了保证通口两端的直线距离必须小于缆索的直径,就必须通过增大残圆形架直径的方式去实现,这样一来就会增大装置自重。
2.开口闭口结构
开口闭口结构为圆心角为n度的残圆形架,N+n=360度,开口闭口结构所在圆的直径等于残圆形架所在圆的直径,与残圆支架构成一个完整的圆形结构。n的取值范围在60度到80度之间,这就保证开口闭口结构打开通口能有效通过缆索接口,而且也能便于在检测开始时将本装置顺利安置到缆索上。因此这个通口两端的直线距离必须大于缆索的直径,不然的话就不能在检测开始时将本装置安置到缆索上。
开口闭口结构材质与残圆形架材质相同,从而解决了检测架重量分配更加均匀,不会出现偏重的情况,能够保持任何状态下的提速检测测试。
3.工作原理
残圆形架一端与开口闭口结构一端通过固定轴铰接。残圆形架的铰接端设有与铰接端同心的弧形轨道,开口闭口结构的铰接端设有设有拨杆,拨杆顶端从弧形轨道穿出。开口闭口结构的控制机构包括伺服电机和连接螺栓。伺服电机通过机架设置在残圆形架顶部,且伺服电机的输出轴轴心与残圆形架、开口闭口结构的铰接处同心,伺服电机的输出轴通过连接螺栓与拨杆连接。
当在检测架在闭合状态时,拨杆在伺服电机的作用下转动到弧形轨道最里端。当在检测架在开启状态时,拨杆在伺服电机的作用下转动到弧形轨道最外端。残圆形架的末端设有磁片,开口闭口结构末端设有铁片,磁片与铁片通过磁力互相吸引。拨杆在伺服电机的作用下转动到弧形轨道最里端时,磁片与铁片通过磁力互相吸引,使残圆形架、开口闭口结构的临近端在磁力作用下固定。
在残圆形架和开口闭口结构所构成的圆形支架上,如图所示按照均匀分布的阵列设置四个行走轮机构、四个微型检测摄像头,完成检测支架在缆索表面的行走与停留,进行对应处的检测。
本检测机器人用检测支架装置使用残圆形架、开口闭口结构,使检测架的架构行进一步优化。优化后的检测支架既更便于夹装和摘取,具有结构更加简单,减低制作成本的优点,也避免了因检测架的配重问题而造成的不能稳定运行和提速的问题。
作者简介:
赵淑娟(1973-),女,汉,重庆工业职业技术学院,教授。主要研究方向:电气自动化及机电一体化技术。
