无人机航测技术在水利工程确权划界中的应用
2020-04-16吕艳兵
吕艳兵
(忻州市水利勘测设计院,山西 忻州 034000)
水利工程确权划界,是依法对河道及水利工程划定管理和保护范围,是有效推进河长制工作的重要手段。传统测量技术成本高、效率低,已无法满足现代工程管理需要。无人机航测具有成本低,效率高等优势。将无人机航测技术应用到水利工程勘测中,在保证勘测成果质量的同时,可提高勘测作业效率。
1 GPS D 级控制网测量
工程平面坐标系统采用CGCS 2000,中央子午线为111°,高斯投影为3°带;高程采用1985 国家黄海高程;航测数字化地形图成图比例尺为1∶2000,等高距为2 m;测图范围包括运行区、工程区(从划界范围的周边外延300 m)、库区周边(从校核水位外延300 m);数字线划图(DLG)为AUTOCAD 2004 的DWG 数据格式;数字正射影像图(DOM)为TIF 数据格式(0.07 m分辨率)。
1.1 GPS 外业观测
本次测量的D 级控制网,选取了14 点组成D 级网进行观测,并按点名进行编号(FD 01—13),点间距为4~6 km。GPS 网使用三台南方GPS 接收机(仪器标称精度:静态定位±5 mm+2 ppm),三台华测GPS 接收机(仪器标称精度:静态定位±5 mm + 2ppm)进行观测,采用三点推进边连式构网法同步观测,观测时,有效卫星数应不少于4 颗,卫星高度角最小为15°,数据间隔为15 s,时段长度大于1 h,从天线的三面分别测量天线高三次,取平均值。
1.2 GPS 布网
实测GPS 控制点15 个,其中已知控制点2 个,未知点13 个,组成同步环66 个,异步环38 个。独立基线20 条,其中必要基线14 条,多余基线36 条,平均重复设站数为1.6/站,符合《全球定位系统(GPS)测量规范》规定1.6/站[1],详见表1。
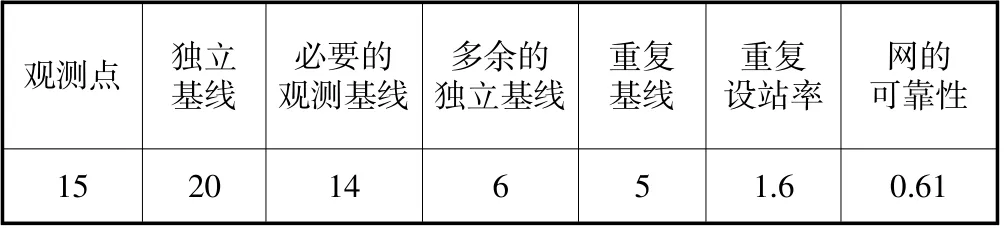
表1 GPS 观测网的概述
1.3 GPS 基线处理和独立基线选取
外业观测后所有数据转化为Rinex 数据,用计算机对外业数据进行检查,检查得中误差小于40 mm,方差比大于3。此次观测共形成52 条合格基线,基线最短边长349 m,最大边长7670.4 m,平均边长4 047 m,详见表2。
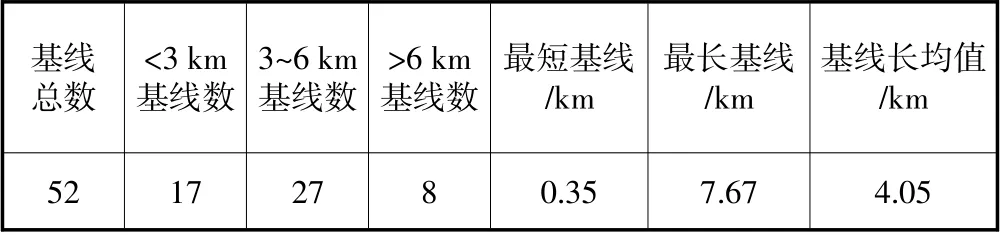
表2 GPS网的基线
本次观测共形成66 个同步环,同步环最优闭合差1.768 mm,最弱闭合差33.018 mm。所有同步环坐标分量相对闭合差和全长相对闭合差均小于闭合限差。
本次观测形成的异步环38 个。异步环最优闭合差6.443 mm,最弱闭合差36.577 mm。网形质量良好,构网基线合理。基线质量统计见表3。
1.4 GPS 网无约束平差
对GPS 网三维无约束平差后,点位中误差为±0.0033 cm、最弱点为FD 01。基线相对精度最弱边YSN 1392141C-FD 13141BN、长度979.796 m,相对精度1/92146,表明控制网的内符合精度较高。
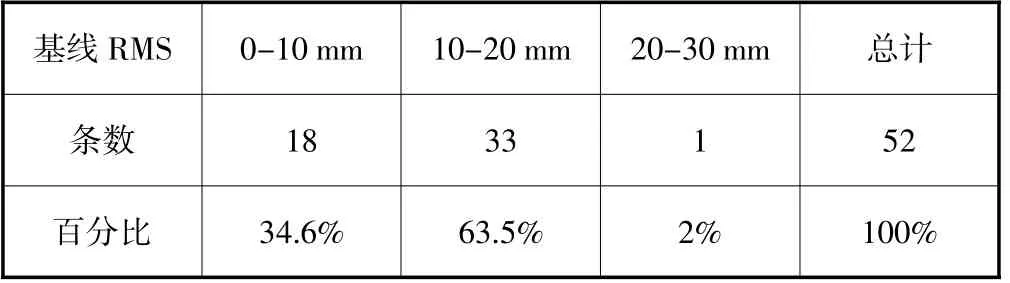
表3 基线质量统计
1.5 CGCS 2000 坐标系下GPS 网约束平差
CGCS 2000 坐标系下无约束平差,中央子午线为111°,高斯投影为3°带,固定平面起算点YSN 进行无约束平差,见表4。
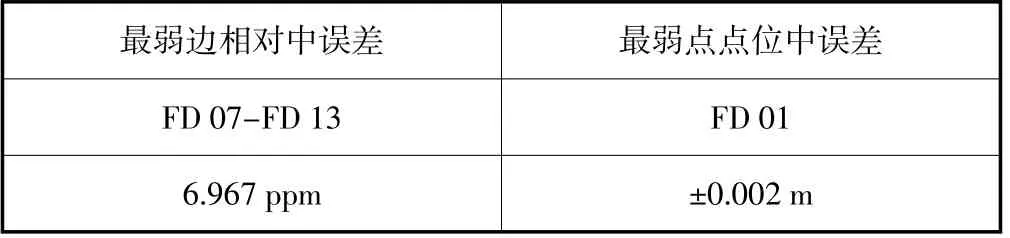
表4 GPS 网精度统计
1.6 高程控制测量
原高程基准为大沽高程,本次测量采用1985 高程基准,以三等水准联测水库高程基准BM 02 与国家Ⅱ等水准点静汾15 后,1985 高程比大沽高程高1.518 m,D 级控制网的高程采用原四等水准网成果。
2 航测航摄作业
2.1 像控点布设
测区布设像控点89 个,检查点85 个,像控点及检查点采用GPS RTK 测量。像控点均匀布设于水库周边。利用数字空三进行平高加密。像控点打小木桩和地面齐平并且做好L 形白粉标志,像控点一律采用顺序号前冠英文字母XK 方法编号,整个测区没有重号。检查点采用顺序号前冠英文字母JC 方法编号。
2.2 像控点的测量
在D 级GNSS 点的基础上,利用SXCORS RTK 架设三脚架三次初始化测量像控点,84 坐标系与GCCS 2000 坐标系的转换关系的获取方法,采用在测区现场,通过点校正的方法获取。转换参数的求解,采用13 个D 级点,并且能覆盖整个测区,通过合适的数学模型及可靠性检验,对多点组合方式进行计算和优选。通过RTK 测量像控点坐标时,其转换残差应不大于图上±0.1 mm。RTK 测量像控点高程,拟合残差为等高距的1/10[2]。全部像控点又经过山西省测绘工程院转换GC 2000 坐标系和1985 国家高程基准,较差在允许范围。
2.3 航空摄影
采用大鹏无人机系统(CW-10)搭载严密检校过的高分辨率数码相机Sony ILCE7R,完成所有航摄工作。按航片地面平均分辨率为0.07 m,相对航高为513 m 飞行。结合测区地形高差不应大于1/6 航高,分为3 个摄区,共飞行8 架次,完成航测面积为102 km2。摄影测量时间选择,应确保影像能真实地显现地面细部,太阳高度角应大于30°,阴影应小于2 倍时进行[3-4]。
2.4 测绘成果质量检查
2.4.1 GPS 数据采集
为提高搜索空间,无人机飞行时,差分GPS 天线置于飞机前方;相机拍下的每张照片,都和飞控系统记录的坐标点一一对应,飞行结束后,如果从飞控系统下载的POS 数据和照片的数量对应,则表明GPS数据采集正确。
2.4.2 照片数据质量
影像质量特别强调影像清晰,反差适中,颜色饱和,色彩鲜明,色调一致。有较丰富的层次、能辨别与地面分辨率相适应的细小地物影像,满足外业全要素精确调绘和室内判读的要求。
2.4.3 飞行质量
无人机飞行选在风速不大且稳定,日照充足的时段,飞行质量较高。相片的航测范围覆盖了整个测区,无漏测区域。航测时航向重叠率大于等于80%;旁向重叠率大于等于75%。经检查,所有航测数据完整清晰,满足精度和规范的要求。
3 航测成图的内业处理
3.1 数据预处理
为了正射影像精度小于4 个像素,DOM 和DLG成图精度可达1∶2 000 的要求,选用Pix4D 进行数据处理。
3.2 影像预处理
影像预处理包括增强图像、相片变形校正、编辑等工序,预处理后的影像更加鲜明,有利于后期空三加密。
3.3 解算GPS 后差分数据
在测区已知点架设GPS 接收机,为静态采集模式。参数设置为:在无人机起飞前直至降落持续采样,间隔为1 s。飞行时公共卫星数多于4 颗,且解算全过程显示绿色,说明数据质量较好,解算得到WGS 84 坐标下的POS 坐标数据。
3.4 空三加密
为达到1∶2 000 的精度要求,空三加密采用Pix4D进行,且刺点的误差最大不能超过3 个像素[5]。
3.5 DSM 质量评价
在武汉点云科技有限公司开发的SKYPHOTO-MAP3D 软件下,基于数字正射影像DOM 和数字高程模型DEM 生成实景三维模型DSM,提取检查点坐标,与检查点RTK 实测坐标比较,进行DSM 质量评价。经计算,检查点平面中误差±0.015 cm,高程中误差0.045 cm。
4 航测成图
4.1 数字线划地形图编辑
数据采集在武汉点云科技有限公司开发的SKYPHOTO-MAP3D 软件下,基于数字正射影像DOM和数字高程模型DEM 生成实景三维模型DSM,点状地物在地物的定位点上采集,线状地物在地物中心线采集,偏差不能超过图上0.1 mm。
DLG 成图软件使用《南方CASS10.1 地形图系统》,按《地形图图式》标准进行修改直至满足成图要求。
4.2 数字正射影像图的制作
生成DEM 后,可进行DOM 的制作。生成DOM后,要对其拉丝、划痕、变形及重叠进行检查,并用PHOTOSHOP 软件进行调色和修饰。最后在图幅上加地名、图名等打印成图。
