脊髓损伤患者步行功能康复设备的研究进展*
2020-04-15刘二宁邹任玲卢旭华王海滨
刘二宁,邹任玲△, 卢旭华,王海滨
(1.上海理工大学医疗器械与食品工程学院,上海 200093;2. 第二军医大学附属上海长征医院,上海 200003)
1 引 言
脊髓损伤(spinal cord injury,SCI)是指由创伤(如交通事故、高空坠落、运动损伤等)、退化等疾病造成的脊髓结构、功能的损害。脊髓损伤的症状取决于受损脊髓的位置和损伤程度,最常见的是下肢运动和感觉障碍,严重的脊髓损伤还会影响二便功能[1-2]。据世界卫生组织统计,全球每年约50万人患有SCI,且发病率在逐年升高[3-4]。随着医学的发展,脊髓损伤患者的生存率大大提高,但如何恢复和重建其下肢运动能力仍是一个难题。依靠现有的医疗技术还无法达到重建步行能力的理想效果,但随着下肢康复机器人逐渐应用于医学康复领域,提高了脊髓损伤患者恢复行走能力的可能性[5]。神经重构是目前脊髓损伤后的主要恢复机制,通过反复运动训练形成的条件刺激有利于脊髓可塑性的发生[6]。脊髓损伤患者步行功能的康复可以通过受影响肢体的使用,有效地改善脊髓损伤患者的下肢运动、触觉和痛觉功能,有助于促进神经恢复[7]。下肢康复机器人是具有步行训练、减重、辅助行走的新型康复设备,在SCI患者康复中可以提供有效和安全的步态训练,帮助患者改善和重建步行能力[8]。
根据美国脊髓损伤协会(ASIA)分类法,脊髓损伤分为五个等级,见表1。

表1 ASIA脊髓损伤分类
结合下肢康复机器人在脊髓损伤患者康复中的功能,可以将其分为两类:一类是步态康复训练设备,主要用于前中期康复,患者通过重复的步行训练达到逐渐恢复下肢运动能力的效果;另一类是辅助行走型设备,对于大多数残存能力不足以完成行走活动的脊髓损伤患者,需要借助辅助设备通过替代和补偿的方式协助患者完成日常的行走活动。
2 步态康复训练设备
步态康复训练设备用来帮助患者进行肢体功能康复及辅助练习。传统的步行训练方法依赖于康复治疗师的人力,患者的训练强度有限,很难实现高强度、重复性的训练,具有一定的局限性。利用步态训练设备辅助步行训练在满足治疗水平的同时,还可以正确地指导患者姿势完成具有任务向的运动训练,结合神经系统的可塑性,可以促进脊髓损伤患者步行功能的恢复[8]。
步态康复训练设备较常见为Locomat机器(见图1),其采用悬吊的减重方式,在医用跑步机上通过腿部穿戴外骨骼帮助患者进行步态训练。在患者进行康复训练时,Locomat通过传感器间可以实时地监测患者的运动状态,从而引导患者以正确的姿势完成步行,且自身具备评估系统,并具有适应人群范围广的特点[9-10]。目前,Locomat机器技术已经较为成熟,并结合了虚拟现实技术,更好地提高了患者训练的主动性。
由大艾机器人自主研发的AIWALKER(艾康,见图2)适用于脊髓损伤患者的早中期康复训练,采用可移动式支架支撑患者脊柱、稳定骨盆,利用外骨骼装置可以帮助患者以自然真实的步态行走,能实现站立、原地步行和室内室外平地步行等训练模式,具有操作简便、加速康复以及移动场景训练等优势。
瑞士Reha Technology推出的G-EO System(见图3)是另一种应用广泛的步态训练设备,但其采用足底驱动的方式,减小了腿部外骨骼对患者下肢的约束,利用脚部的机械约束装置可以模拟步行时踝关节和跖趾关节的运动姿态,提供了模拟爬楼梯和行走的两种训练模式。G-EO System支持步态模式的订制,可为患者提供个性化治疗,其针对SCI患者特别开发的膝关节支架,在减轻康复医师体力负担的同时,还可以更好地完成对患者膝关节的引导辅助功能[11-12]。
韩国保生科技公司设计的WalkBot步态康复机器人(见图4),除了髋、膝关节外,在踝关节采用驱动装置,可以帮助患者完成更加完整的步态训练、改善肌肉力量和关节活动度。WalkBot提供模拟场景训练,在训练的同时对患者的步态、肌力和肌张力进行评估和生物反馈训练,集诊断、测量和治疗为一体,并推出了儿童专用康复机器人“Walkbot-K”[13]。
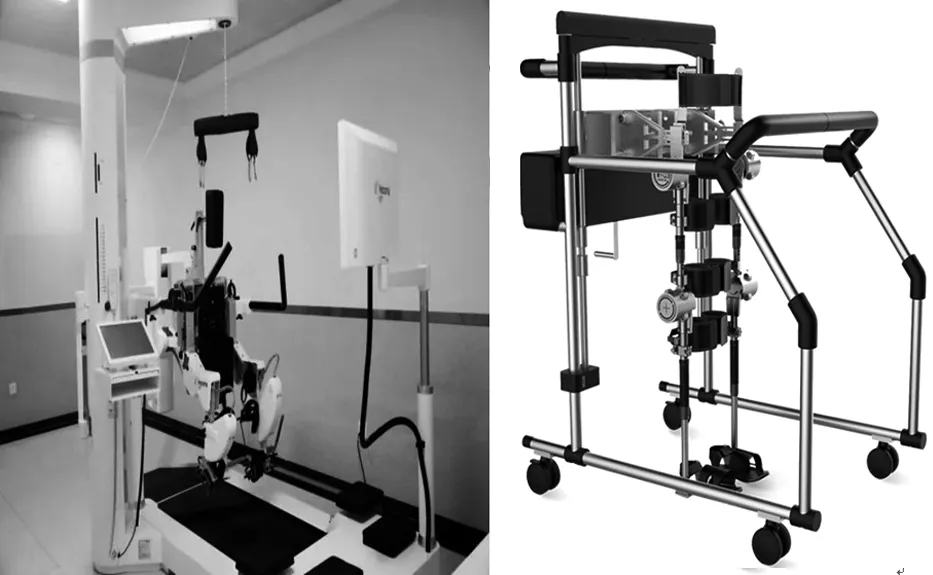
图1Locomat机器 图2AIWALKER(艾康)
Fig.1Locomat Fig.2AIWALKER
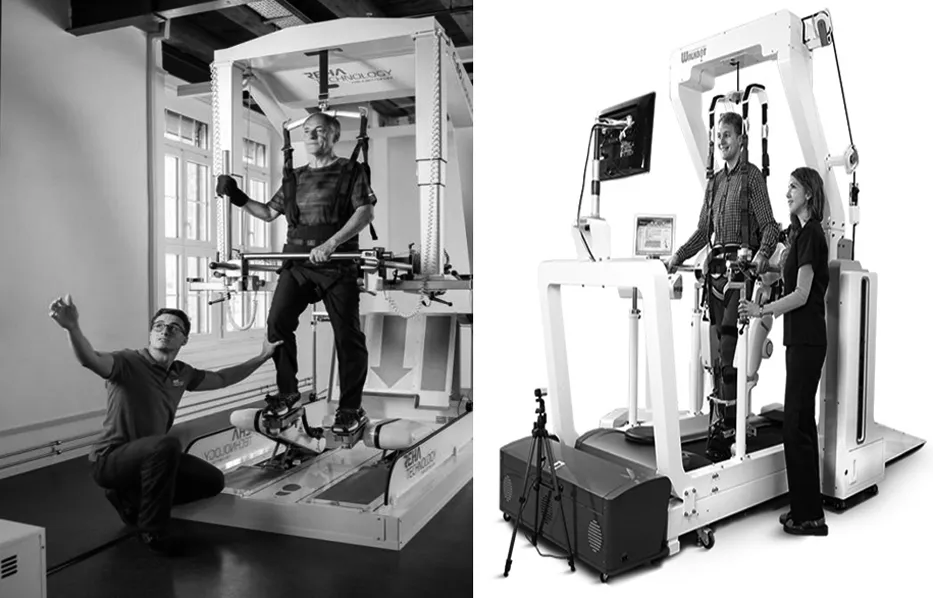
图3G-EO System 图4WALKBOT
Fig.3G-EO System Fig.4WALKBOT
3 辅助行走设备
脊髓损伤患者常伴有不同程度的下肢运动功能障碍,对于脊髓损伤严重的患者来说,需使用辅助型设备来代偿肢体功能。在帮助患者重建行走能力的同时,一方面可以加强康复训练,另一方面可增加患者生活范围,提高生活质量。可穿戴式助行机器人是目前应用较为广泛的一种基于人体仿生学的辅助行走设备,通过平衡支撑和动力外骨骼帮助患者完成日常行走活动[14]。近年来随着脑机接口技术(BCI)的发展,基于BCI的可穿戴设备可以让患者更加自如地主动控制机器人,完成预期的动作而不是被动地拉伸肌肉[15],帮助患者完成日常生活中的基本功能。
日本筑波大学研制的HAL(混合辅助肢体,见图5)是目前发展最成功的民用助行机器人,且已获得了全球安全认证,可以帮助偏瘫患者和老年人重新获得行走能力。HAL通过贴附于皮肤的感应器获取运动信号,以感知穿戴者想象的动作行为,进而使用动力装置带动设备帮助患者完成行走等动作[16-17],利用充电电池驱动,工作时间可以达到3 h左右。
波士顿机器人公司推出的ReWalk(见图6)采用体感芯片,在行走过程中可以感应患者重心的变化,当重心前移时,安置在膝、髋关机的电机带动装置模仿自然的行走步态,完成向前迈步的动作[18]。目前,ReWalk 6.0使用了更加轻盈的塑料材质,并将背负式电池仓改为安装在臀侧部位,在降低负重感的同时增加了穿戴的舒适性。
美国Ekso Bionics的Ekso GT选用铝合金和钛合金材料,总重量约23 kg,其利用陀螺仪、轨迹传感器和扭矩传感器来感知使用者的受伤程度,以估算出使用者在行走当中需要的帮助程度,在提供适当动力的同时可以提高患者的主动性。
新西兰Rex Bionics的Rex产品(见图7)是一款支持无支撑独立行走的可穿戴外骨骼,该机器人表面使用了坚固的轻质材料,利用尼龙塔扣及腰间的腰带将使用者的身体与外骨骼固定在一起,使用者通过腰间的两个操丛杆完成姿态控制。
国内西安交大设计的脑控下肢外骨骼康复机器人可以适用不同的路面环境,利用视觉诱导的脑机接口技术,患者可以更加自如地控制机器。在患者行走的同时可以对神经通路进行刺激,有助于患者运动神经通路的构建,帮助患者站立行走。台湾福宝科技的FREE Walk将控制接口设计在用于平衡支撑的拐杖上,使用者按下按钮通过无线传输方式传递指令让机器行走。在易用性方面,FREE Walk设计时纳入人体工学考量,使用轻量化材质,患者在使用时可以自行完成穿脱并有效地避免使用者在穿戴过程中受到伤害。傅里叶智能科技研发的“Fourier X1”(见图8)是国内首款具有“触觉”的辅助行走机器人,可以帮助患者完成坐站、行走、上下楼梯等基本运动。Fourier X1在下肢的关节以及足底安装了传感器以感知穿戴者的肌电、肌肉力量、姿势变化等信号,在行走过程中可以实时感知患者的变化,动态调整步态轨迹。
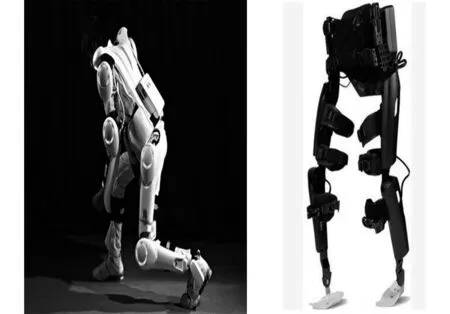
图5HAL 图6ReWalk机器人
Fig.5HAL Fig.6ReWalk

图7Rex 图8Fourier X1
Fig.7RexFig.8Fourier X1
4 总结与展望
脊髓损伤患者由于下肢运动功能受损,导致生活不能自理,往往会产生忧郁、焦虑等心理问题,并且会产生压疮、骨质疏松、肌肉萎缩、痉挛等并发症。使用康复机器人辅助患者进行步态训练或行走可以有效地避免此类并发症,并且对患者的心理有一定的开导作用[19]。目前康复机器人技术已经能够较好地满足患者的康复需求,但在其他方面还需继续完善,未来的发展应该有以下几个方向。(1)智能化:随着脑机接口技术的完善与发展,未来康复机器人的控制系统必将更加灵活和精确,人机耦合程度也会增加,患者可以通过自身的意念来控制机器人完成希望的动作。未来的辅助步行设备还应具有一定的学习能力,以便适用于不同路况和不同患者的行走习惯。(2)个性化:由于SCI患者的损伤程度不同,在设计上应考虑到患者的生理和心理情况,让患者使用起来更加舒适,这样才能提高实用性,帮助患者重新回归社会。在康复过程中,通过使用传感器实时监测患者的康复情况,以便制定更好的个性化治疗方案。(3)轻型化:目前大多数康复机器人结构复杂且体积较大,从而导致成本过高、临床应用较少。需要更多的康复机器人开始使用更加轻便的材料和寻找小型化的驱动方式以及高性能能源,在减少重量的同时降低能耗。借助于材料和传感及技术的小型化,未来的康复机器人也会趋于轻型化、微型化。
