太阳能飞机循环飞行的高度剖面能量策略
2020-04-15仲维国郭有光张凯
仲维国,郭有光,张凯
中国航天空气动力技术研究院,北京 100074
太阳能飞机(包括太阳能无人机)在前景上区别于传统航空器的最大优势,在于以零燃料消耗获得突破性的多日乃至数月的续航表现。太阳能飞机若持续在低空飞行,其需用功率小,理论上容易实现长续航,但对流层复杂的风场、光照等气候条件限制了其应用;高空飞行有利于发挥载荷效能,气象条件稳定,且受民航航线等因素的影响大大减小,但要付出推进系统功耗的代价,增加了太阳能飞机设计研制的技术困难。其解决思路一方面是提高能源流通效率——包括光伏电池阵的光电转换效率和动力电池组的能量密度,以及提高升阻比、机体和设备轻质化等减重增效设计,特别是控制翼载[1]。另一方面是针对已有机型的应用,从充分吸收利用环境能量和减少能量消耗着手。太阳能飞机在使用上的一大特点就是其续航性能表现严重依赖光伏条件,具体地对于高空太阳能飞机来说就是所处纬度和日期。太阳能飞机多日循环飞行过程中的能量管理策略,就是依据系统所处环境条件、设计高度和航线等任务剖面,以提升飞机的续航性能或拓展飞机的可用范围,含飞行日期、纬度和飞行高度,属飞行器总体设计技术领域。
太阳能飞机在飞行中带有攻角,且太阳能电池阵的铺装需贴合机翼的翼型剖面曲线,这使得太阳位于不同方位时光伏输出存在差异,为此产生了优化平面飞行条件下的航向及姿态策略[2-4],以及结合姿态与高度的调整、在三维空间内优化航线[5-7]的研究思路,还可加入传感器覆盖的优化目标[8-9]等综合措施,以适应通信等特定应用领域的定点使用要求,在盘旋过程中结合升降运动实现电池阵法线对日光矢量夹角最小化的实时跟踪,最大化光伏吸收。包括极光飞行科学公司Odysseus太阳能无人机早期概念在内的很多方案研究还通过旋转主动式光伏组件增加太阳能飞机光伏吸收的光伏功率特性[10-12]。NASA的应用概念研究[12]则认为对理想轨迹的跟踪是不可行的,实际飞行必须考虑到稳定风场对飞机航向的影响;而可动光伏组件带来的增益则基本与其重量、阻力、功耗等代价抵消。“Solar Impulse II”的环球飞行[13]等活动促进了中低空太阳能飞机在统计及预报气象条件下、给定起点终点的跨洋飞行路径规划问题的研究[14]。
昼夜周期性变高度飞行策略[15]使得当前技术条件下的高空连续多日飞行成为可能。受制于能源等技术进步的程度,在可见的一段时期内,太阳能飞机还必须结合白天爬升积蓄重力势能、夜间降低平飞高度的变高度策略来节省能量消耗。针对定高飞行[16]或变高度飞行[17]的敏感度定量分析,可为未定系统的参数域给出参数重要度排序。当前在研究太阳能飞机昼夜循环的能量平衡关系时,多从解析方法入手,为简便,多关注昼夜能量收支的总量平衡,存在假设所有未用作直接驱动飞机的能量都能完全储存[18]、未考虑动力电池的容量和充放功率限制,以及分段定高或定功率飞行等条件[19];下滑段多采取无动力滑翔,对下滑时间关于下滑功率的敏感度缺乏研究,而下滑功率又取决于具体推进系统在高度、空速、转速等条件下的特性。以上简化主要适用于在参数设计阶段近似估计系统的规模,如尺度、重量、太阳电池铺阵面积、动力电池组装机容量等。但在精确仿真或实际飞行中,基于不恰当近似的能量策略对循环性能的影响很大,甚至导致任务提前终止。研究中常见的典型方法是:上午先爬升到某个高度平飞,同时将多余的光伏功率给动力电池组充电——充电完成后转入爬升,积蓄势能——当可用飞行功率减小时,即使太阳电池阵仍有相当的输出功率,也单纯为了减小动力输出转入无动力下滑,直至下滑至夜间平飞高度——在此高度依靠动力电池组放电,维持平飞至次日太阳升起[20-21]。这样的问题:一是浪费了大量富余的太阳能,特别是在正午和下午;二是过程中人为限定较多,缺乏清晰的判定逻辑,难以实现数天乃至未来数月变化条件下的长航时飞行中的自动模式切换;三是欠缺针对不同机型参数、不同光伏环境(纬度、季节)等组合条件的适应性。
整体来看,在一般的应用场景中,实际任务航向和载荷指向性等限制条件使得光伏跟踪策略大打折扣,因此本文主要从变高度飞行中的能量利用策略角度进行研究。具体地,针对各种变高度飞行策略研究中存在的分段平飞假设、转换时机选取人为性强等问题,本文首先提出一种剩余充电能量的预测方法,能够可靠、简便地实时计算从当前时刻起、当天可留给充电的剩余光伏能量,以充分利用光伏、增加能量摄取;然后从管控能量消耗的角度,研究下滑段的推进功率管理。最终形成循环周期内完整的高度剖面能量利用策略,以最大化次日凌晨的动力电池组余量,提高继续跨昼夜飞行的成功率。
1 太阳能飞机能量平衡原理
太阳能飞机的飞行遵循重力平衡、能量平衡的原则:① 重力平衡:飞机规模(与太阳电池阵尺寸、动力电池组重量及相应附件等有关)满足重力与气动升力(与机翼面积成正比)平衡;② 能量平衡:飞行器全系统的推进、机载设备和有效载荷等耗用能量,加上动力电池组容量和重力势能等变化(以上包含系统损耗),与吸收的光伏转换能量达成平衡。对于多日循环的太阳能飞机,首日初始条件一般为动力电池组满电,从第二天起的后续多日飞行中,每24 h的系统耗能与光伏转换能量平衡基本体现出周期性重复的特点,高度剖面如图1所示。

图1 太阳能飞机典型高度剖面Fig.1 Typical altitude profile of solar powered aircraft
以上能量平衡也表现为每时每刻的功率收支平衡关系:
(1)

光伏功率在一天的涨落中相对于全机用电需求总是表现出动态的盈亏,动力电池组和飞行器重力势能就起到一个能量缓冲池的作用:在白天,将光伏发电转化存储为足够多的动力电池组电量和重力势能,到夜间释放以维持飞行。出于太阳能环境的24 h周期特性,以及飞机系统的能量缓冲作用,为方便,研究中往往以24 h为窗口考虑全天能量平衡。然而将时间尺度缩小到具体时段,由于动力电池组的充放电速率和容量有限,加上推进系统能力边界和飞机气动特性也限制了飞机的爬升率(即重力势能的积累),因此功率的吸收和提取并不总是满足实时需求,24 h周期内的能量平衡仅构成持续飞行的必要条件,是不够精确的,必须在连续时间仿真的条件下检验。
另一方面,从系统综合的角度来看,考虑到电能在飞行器各系统之间的分配、流动和转换存在相当的效率损失和边界限制,在设计阶段必须保证24 h周期内光伏转换能量在总量上保有盈余。但单纯增加光伏输出、动力电池组容量或推进系统额定功率等途径,从重力平衡和能量平衡的综合角度来看,到了一定程度之后是得不偿失的。
故此,太阳能飞机的能量平衡要接近设计状态,还需面向具体使用条件(纬度、季节、夜间飞行高度、载重等),结合任务剖面制定能量管理策略来实施,同时减轻太阳能飞机对于硬件规模的设计压力,使光伏吸收能量的利用接近最优。
2 飞行阶段与能量管理
在不限定具体能量策略的情况下,根据太阳能的昼夜变化,太阳能飞机的一般飞行剖面划分如下(全过程中,持续监控当地太阳时t、太阳电池阵光伏输出功率Ps(t)和动力电池组剩余电量Ebat(t)等关键状态参数):

式中:ηpro为推进系统综合效率;Plevel=GV/K为飞机平飞需用功率,G、V、K分别为飞机总重、真空速和升阻比。

阶段3 当Ps(t)≤Plevel(H)时,飞机下滑。
阶段4 当Ps(t)小于下滑阶段需用功率时,动力电池组放电,进入夜间下滑,直到指定平飞高度,夜间平飞高度的下限由任务要求确定。
能量管理的重点在于如何合理地分配Pr与Pbat。阶段2一般在正午前后进行。在上午爬升时段,随着时间向当地12时的推进,Ps(t)逐渐接近于峰值;同时随着飞机高度提升,飞机真空速随空气密度减小而逐渐增长,进而导致飞行需用功率增加,储存重力势能的代价也越来越高,给Pr分配等量能量可维持所在高度的飞行时间也越来越少。因此,相较于一般的早晨充电,更合理的策略是随着飞机爬升,实时预测光伏剩余能量是否能够满足动力电池充电需求,选取合适时机,在正午前后的光伏功率峰值时段优先满足动力电池组充电功率Pbat,剩余光伏功率用于维持或继续积累重力势能。
此外还有入夜后下滑段与最低高度平飞段的能量分配问题。能量策略的关注目标是昼夜飞行剖面的终点能量最大。相比之下,由于重力势能释放的作用,夜间平飞段功率显著大于夜间下滑段。因此,总的原则是尽量延长下滑时间,推迟转入平飞的时间,从而减小平飞段的持续时间及总能耗。
因此在阶段3,应尽量利用全部光伏能量以减小下滑率,而非某些策略所用的接近无动力下滑;在阶段4,相较于一般的无动力下滑,更合适的策略应为选取推进系统维持功率满足:在当前高度,当飞行器维持平稳下滑时,供推进系统输入的动力电池组放电功率与螺旋桨正输出功率之差,落在极小值附近。此条件下飞行器能够兼顾维持较小的动力电池组放电速率和一定的正拉力,其意义在于以较少的动力电池组放电维持较小的下滑率;取得电池放电与下滑推进系统的最高综合效率。
3 光伏尖峰剩余能量预测
以下给出第2节阶段2中,预测正午前后太阳辐射能量尖峰部分的剩余充电能量的方法。
给定纬度、地理位置及高度,容易推导出[11]太阳辐射功率随时间变化函数Ps(t)近似为以当地时间正午12时为对称中心的正弦曲线,如图2所示。
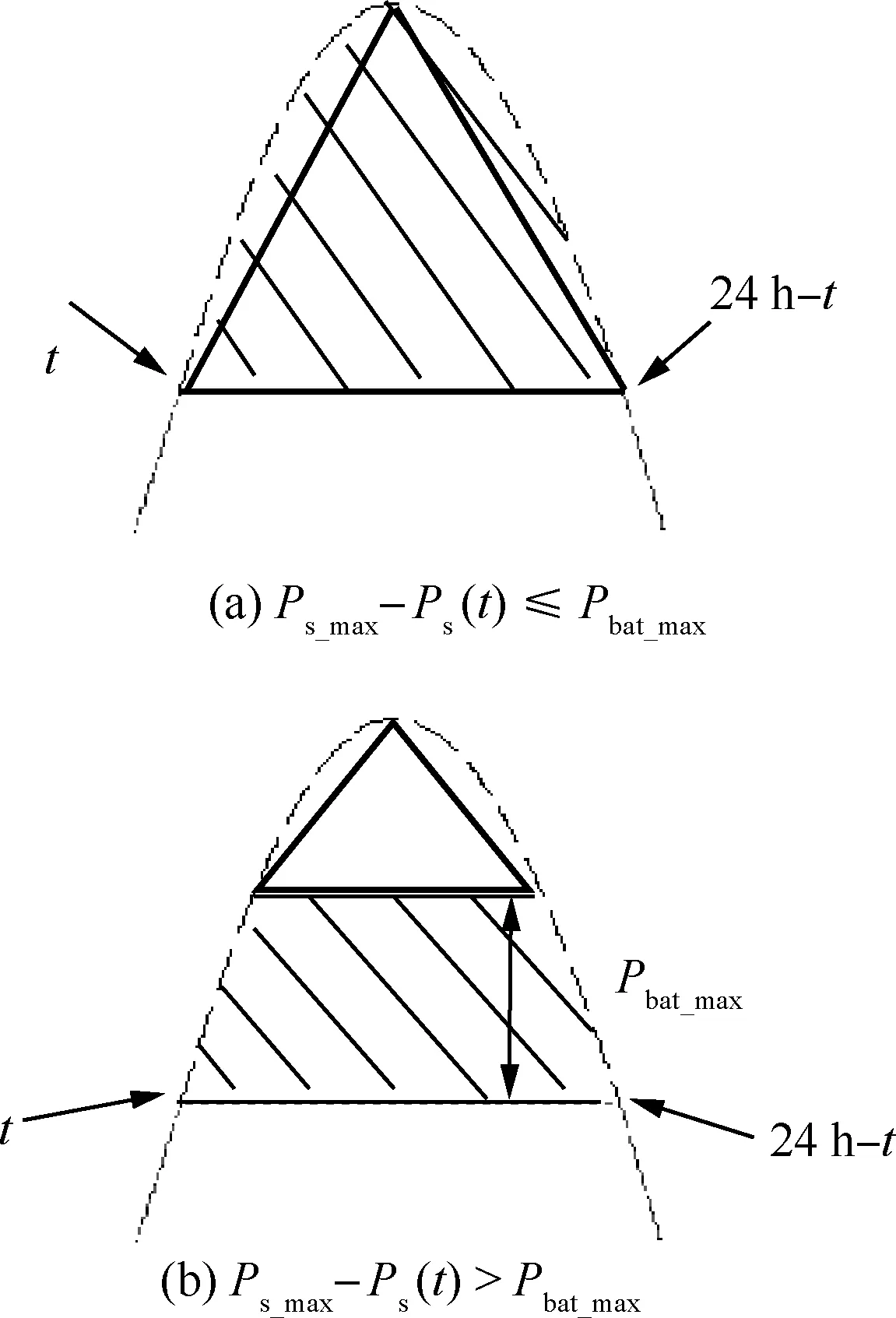
图2 阴影面积为当前动力电池充电预留的 光伏能量Fig.2 Photovoltaic energy allocated to charge power battery depicted as shadow area
图2(a)中,取正午前阶段2)任一时刻t(单位为h),若保留当前Ps(t)作为飞行需用功率Pr,则Ps(t)水平线以上的光伏功率随时间积分为可用于动力电池组充电的能量。
综上,可用于动力电池组充电的光伏功率随时间积分为

(2)
对积分式(2)直接积分,不便于机上实时计算。这里使用一种近似方法,根据光伏输出功率近似于正弦函数的特点,首先考察标准正弦函数sint,易知以t=π/2为中心的积分
2cost1-sint1(π-2t1)
(3)
作函数
(4)

该比例用来近似图2(a)中取任意时刻t1,三角形部分与阴影部分面积之比。根据罗必塔法则
(5)
由式(4)可知函数f(t)在[0, π/2]是单调的,f(0)=0.785,f(π/4)=0.758,f(1.4)=0.750,说明在研究的时间范围内,式(5)是足够精确的。由此,式(2)近似为
(6)
光伏功率曲线Ps(t)的最大幅值Ps_max及每日光照起止时刻随纬度、高度、季节、天气变化范围较大。当前主流的太阳能飞机多以高空持久飞行为设计目标,高空的光伏功率输出不受云层等天气影响,根据式(6),仅需估计当日当地所处高度的正午光伏功率最大幅值Ps_max,并实时测量光伏输出Ps(t),即可估计出当日可用于动力电池组充电的光伏能量。此外,光伏输出功率随高度有少许变化[11],在11~22 km高度范围内取极大值,22~30 km高度之间略有减小。太阳能无人机的升限一般超过20 km,22~30 km高度占总飞行时间较短,高度对光伏功率的总影响可忽略。
动力电池组充电功率受到充电深度的限制,存在上限。所以当光伏功率富余较多,使得Ps_max-Ps(t1)>Pbat_max时,为动力电池组充电所留能量如图2(b)阴影部分,需扣除阴影以上无法利用的能量峰值部分。同样由式(5),需扣除的面积为ΔS=4/3×SΔ′,其中SΔ′为图2(b)小三角形面积。
Ech(t)随着时间增长逐渐减小,当t=tc时刻,满足Ech(tc)≤动力电池组充电所需能量,tc就是启动电池组充电的最佳时机。将[tc, 24-tc]规划为充电时间段,以充分利用光伏功率曲线的尖峰部分。原则上将该段时间内飞行需用功率限制在Ps(tc)≤Pr_max,Pr_max取决于推进系统最大输入功率。
4 能量利用策略
在第2节飞行剖面的一般阶段划分描述基础上,根据状态切换规则,完整的策略调整为包含每天以下几个阶段:
阶段1 日出后根据任务要求平飞或爬升(从太阳电池阵和动力电池组联合供电,逐渐过渡到太阳电池阵单独供电),同时持续监测系统状态,管理充电时机。
阶段2 爬升充电(太阳电池单独供电,推进系统以稳定功率飞行,剩余功率用于动力电池组充电);充电完毕后,继续以可用光伏输出功率爬升,直至光伏输出功率减弱至无法维持平飞,转入下滑(太阳电池单独供电,尽量维持推进功率)。根据前文的分析,阶段2的具体过程为
① 飞行管理计算机根据测量到的Ps(t),持续更新预留充电能量Ech(t);根据测量到的动力电池组余量Ebat(t),持续更新动力电池组充电需用能量Ech_r(t)=Ebat_0-Ebat(t),其中Ebat_0为动力电池组充电截止容量。
② 当在时刻tc检测到Ech(tc)≤Ech_r(tc),则从tc时刻起,将飞行需用功率限制在Pr(t)=Pr(tc),剩余的光伏输出功率Ps(t)-Pr(tc)用于动力电池组充电;过程中若检测到充电功率达到上限Pbat_max,则将多余光伏输出功率Ps(t)-Pr(t1)-Pbat_max用于补充Pr(t)。
③ 检测到动力电池组充电完成后,将每时刻的光伏输出功率全部用于维持飞行,此时Pr(t)=Ps(t)。随着光伏的衰减,飞机爬升率逐渐减小,并转入下滑。
阶段3 继续下滑到黄昏时,当光伏有效输出不足以维持某一较小的维持功率,则逐渐转入动力电池组单独供电。根据第2节的分析,阶段3的具体过程为
① 检测到光伏输出功率低至下滑段维持功率Pr_m(H)之后,以该维持功率下滑,Pbat(t)=Ps(t)-Pr_m(H),其中Pbat(t)为任一当前时刻t的动力电池组功率。
下滑段维持功率Pr_m(H)按以下方法获得:根据当前测量的高度H、空速V及螺旋桨拉力先验数据T(H,V,n),其中n为螺旋桨转速;确定螺旋桨转速区间nm,使得同时满足:螺旋桨机械做功TV|nm>0,且(Pr-TV)|nm>0落在极小值附近,该式等效于
(7)
式中:ηdis为动力电池组放电效率。此时对应于nm的Pr即为所述
(8)
② 测量到飞机高度下探至夜间巡航高度Hnight之后,转入平飞。
阶段4 夜间平飞至次日黎明(动力电池组单独供电)。
为描述简便,所述方法针对固定的纬度和若干天(例如10天)飞行时间段,并给定夜间最低飞行高度,若无法连续飞行,则尝试降低夜间最低飞行高度。对于飞行过程中纬度和飞行天数跨度较大的情况,将飞行过程分为若干条件相近的飞行段,以同样的方法在每段给定一个夜间飞行高度。
5 仿真算例
仿真模型参数及条件如下:
1) 全机总质量为65 kg,机翼面积为31.25 m2,升力系数为1.0,全机升阻比取28(为简便取平均值,忽略随高度的变化,不影响计算结果的展示性)。
2) 太阳电池阵光电转换效率为9.77%(综合各种损失之后的输出),电池阵铺片面积为20.3 m2;动力电池组可用容量为6 300 W·h(保留容量另计),充放电效率为94%,充放电深度为0.2;推进系统最大输入功率为1 050 W,平飞综合效率为70%,爬升综合效率为65%,下滑综合效率为60%,下滑段维持功率为25 W(以上参数为讨论问题简便取平均值,忽略高度、工况等变化);机上设备需用功率为100 W,设备供电效率为85%。
3) 太阳电池采用平板假设,忽略翼型曲面和飞行姿态对太阳能吸收的影响。
4) 设定3月1日6时起飞,纬度取北纬30°,夜间最低飞行高度12 500 m,设定每日清晨动力电池组与光伏联合供电阶段的最小爬升率为0.2 m/s。
图3~图8对比了根据本文策略(以下称策略A)和传统策略(以下称策略B)得到的多日循环飞行过程的功率、动力电池组容量、飞行高度随时间变化曲线。
5.1 策略A结果
采用第4节策略,可见其具有24 h周期性重复的规律(首日除外)。结合图3标注的状态顺序,过程描述如下:

图3 策略A多日循环飞行过程的功率剖面Fig.3 Power profile of multi-day circle flight by Strategy A
状态0~1:动力电池组供电,起飞后以最小爬升率爬升;光伏达到有效输出之后,光伏和动力电池组联合供电。
状态1~2:当光伏输出功率超过最小爬升率对应的飞行需用功率(状态1),转入光伏单独供电。
状态2~3:随光伏输出功率的增加,当推进系统输入功率达到电动机上限(状态2),推进系统功率稳定在此水平,剩余功率用于动力电池组充电。
状态3~4:动力电池组完成充电后,推进功率不变,富余的光伏功率无法利用,如图3此时间段阴影部分所示。
状态4~5:随光伏输出功率的减弱,当推进系统输入功率低于电动机上限(状态4),以光伏所能提供的功率维持飞行,爬升率逐渐下降,乃至转为下滑。
状态5~6:光伏输出功率低于维持功率之后(状态5),光伏和动力电池组联合供电,以维持功率下滑。
状态6~7:当光伏停止有效输出(状态6),由动力电池组单独供电,以维持功率下滑。
状态7~8:下探至夜间巡航高度之后(状态7),由动力电池组单独供电维持该高度下平飞,直至次日黎明。
状态8~9:以最小爬升率爬升;光伏达到有效输出之后(状态8),光伏和动力电池组联合供电。
状态9~10:当光伏输出功率超过最小爬升率对应的飞行需用功率(状态9),转入光伏单独供电。
状态10~11:随光伏输出功率的增加,当维持当前飞行需用功率以上的光伏预留能量Ech(t)降低到动力电池组充电所需能量(状态10),将推进系统功率稳定在此水平,剩余光伏输出功率用于动力电池组充电。
状态11~12:随光伏输出功率的增加,动力电池组充电功率达到上限(状态11),多余能量用于增加爬升功率。
状态12~13:随光伏输出功率的减弱,动力电池组充电功率低于上限(状态12),推进系统输入功率恢复到状态10~11的水平。
状态13~14:充电完成(状态13),推进系统输入功率以所允许的最大值维持飞行。至状态14,光伏输出持续减弱使得推进系统无法再保持功率上限。状态13~14在推进系统最大输入功率以上存在少许光伏能量的浪费,这来自于第3节光伏尖峰剩余能量预测算法的简化过程造成的光伏能量细微误差,该误差可作为系统设计的保留余量。
其后,重复状态5~14的过程。
以上飞行过程包含了可能出现的典型状态。随飞行条件不同,飞行过程会有差异,例如在极地地区极昼条件下,可能不依赖动力电池组、完全由光伏维持全天飞行。
5.2 策略B结果
作为对比,图4、图6、图8给出了使用传统能量策略的示例。该算例中,白天平飞充电,下午下滑段螺旋桨拉力接近于零,其他条件与前文相同。当光伏输出不足,转入下滑后(图4状态5~7),使用螺旋桨拉力接近于零的小功率驱动(低于图3状态5~7的维持功率),大大节省了推进功耗,且状态6~7的放电功率也有所节省,但实际的下滑率更大(见图8),高度损失更快,导致第一天较图7提前下滑到夜间平飞高度(状态7),所增加的0.63 h平飞时间段内(状态7~8)功率消耗远大于夜间下滑段节省能量。若状态5~7关闭电动机,则螺旋桨产生负拉力,性能更差;若反之在状态5~7采取比第4节策略更大的推进输入功率,例如在状态5~6之间采用光伏加动力电池组联合供电,或在状态6~7之间采取比式更大的推进功率,可以进一步延长下滑时间,但很难提高夜间最低飞行高度,并且大大增加了日出前耗尽动力电池组电量的风险。

图4 策略B的功率剖面Fig.4 Power profile by Strategy B
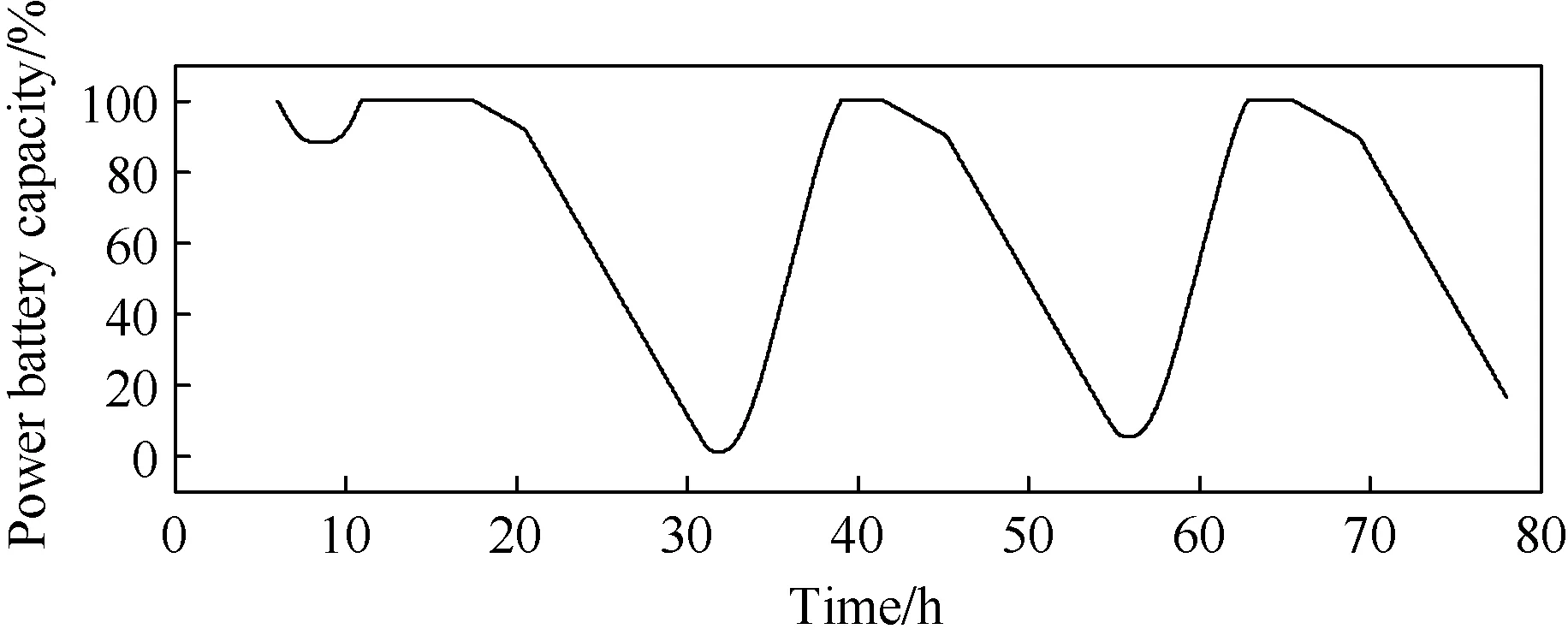
图5 策略A多日循环飞行过程的动力电池组余量 剖面Fig.5 Power battery capacity profile of multi-day circle flight by Strategy A
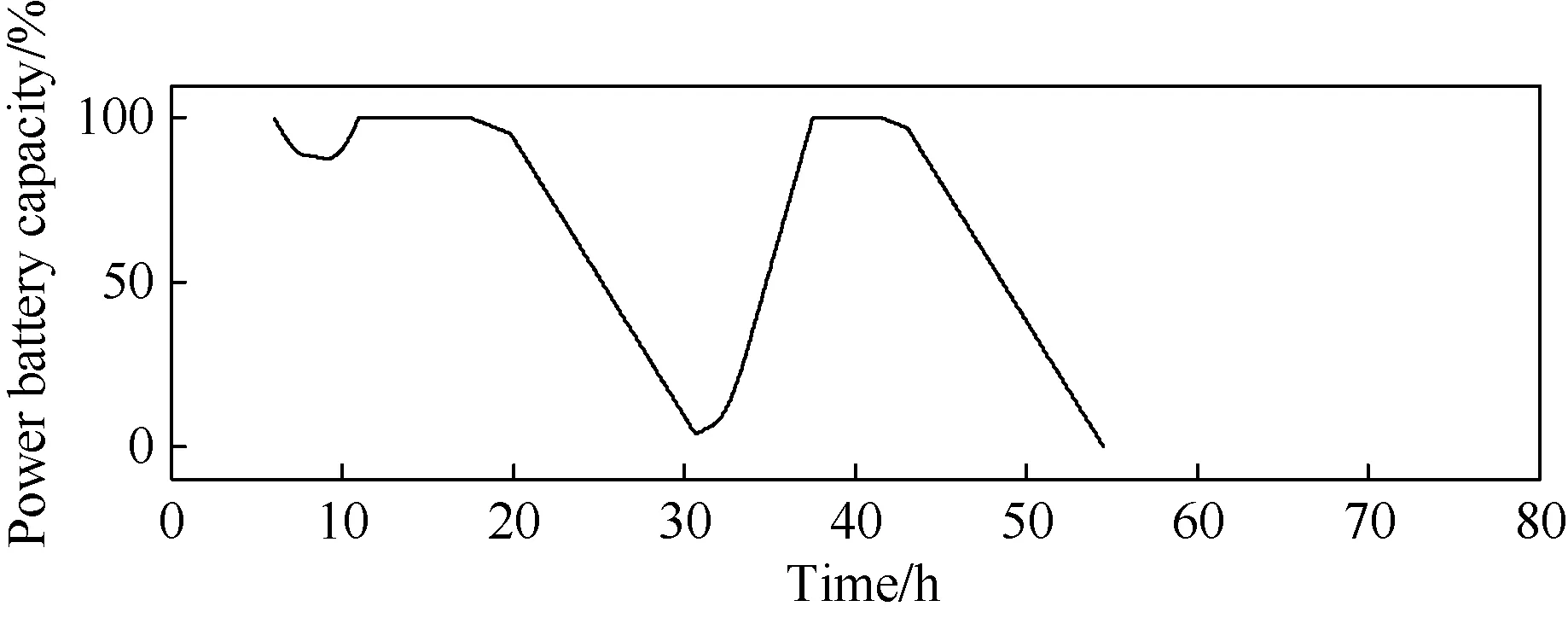
图6 策略B的动力电池组余量剖面Fig.6 Power battery capacity profile by Strategy B

图7 策略A多日循环飞行过程的飞行高度剖面Fig.7 Altitude profile of multi-day circle flight by Strategy A

图8 策略B的飞行高度剖面Fig.8 Altitude profile by Strategy B
图6、图8可见,至次日早晨,动力电池组剩余电量已逼近下限,必须从图4状态8开始降低高度,至状态9平飞,以减少飞行需用功率,同时开始充电,至状态11动力电池组完成充电。原定的最低飞行高度要求已无法满足。
图4状态10~12所示的阴影部分,表示先后因充电功率和推进系统输入功率达到上限造成的光伏输出功率浪费,明显多于图3状态13~14的光伏功率浪费,说明传统能量策略的充电时机没有充分利用正午时刻光伏输出的尖峰。
图8显示次日升限明显降低,图6显示到第3天早晨动力电池组能量耗尽,无法支撑到光伏产生有效输出的时刻,任务终止。使用传统能量策略只能提前降落或在夜间降低高度飞行,未能实现所要求的多日循环飞行。
进一步地,表1给出了满足夜间始终高于某一设定飞行高度的可飞行日期范围(精确到每月的1日和15日)。为体现应用意义,设定夜间高度为高于民航航线的12.5 km。同时考察了在基准质量基础上,全机质量分别加减2 kg对飞行日期范围的影响。
在较高纬度,各种策略的表现差异较小(策略A的最大高度会更高,表中未体现):冬季因光伏能量太弱各种组合均不可用;夏季全天光伏能量充足,策略发挥的影响有限,特别是在极地地区,各种组合的可用日期范围集中在5、6、7这3个月。
北纬40°以南,各种策略显现出差异。当纬度逐渐降低,在全天光伏能量处于较低的边缘范围时(靠近冬季、低纬度),策略A的表现更加突出:北纬30°以南可用日期可增加50%以上;而在{北纬10°,基准质量}、{北纬10°,质量+2 kg}、{北纬20°,质量+2 kg}这几个组合状态下,可用日期增加超过100%。
采取{策略A,质量+2 kg}的技术组合的效能发挥相当于采取{策略B,质量-2 kg}的技术组合,相当于应用策略A增加了4 kg载重能力。太阳能无人机有效载荷占全机质量系数一般在5%~10%,而应用策略A可使载荷占全机重量系数提高6%;{策略B,质量-2 kg}的技术组合中,所减少的2 kg质量,几乎牺牲了搭载能力。

表1 满足夜间12.5 km高度平飞的飞行日期和全机质量范围Table 1 Combination of operation date and takeoff mass satisfying 12.5 km night altitude
注:1.15~12.1指1月15日至12月1日。
6 结 论
本文研究了太阳能飞机循环周期内完整的高度剖面能量利用策略,在限定夜间最低飞行高度的前提下,以最大化次日凌晨的动力电池组余量为目标,管理昼夜循环周期内的功率平衡。结果如下:
1) 在每个24 h周期内,有效利用光伏尖峰功率,优先保证动力电池组充电;在正午以外的日照时间,尽量提高白天的重力势能储存。在白天的势能积累(或高度保持)与保证动力电池组容量之间取得综合优化。
2) 通过下滑段能量管理,从末端系统能量最大化的角度分配驱动功率,延迟了下探至夜间指定高度的时间,减少了夜间维持指定高度飞行的动力电池组放电时间,为第二天提供有效光伏输出之前保留更多动力电池组余量。
3) 过程中无需人工选取状态转换时机,实现了功率自动分配,包括确定动力电池组的充放电时段。方法对于不同机型参数、不同光伏环境(纬度、季节)具有通用性。
该策略可应用于成型太阳能飞机的性能提升,以拓展任务的季节、纬度和夜间最低高度之间组合的可行范围,或增加有效载荷的搭载重量、功耗;也可引入到飞行性能评估手段,用于太阳能飞机方案阶段的设计权衡。
后续可围绕实际飞行过程中进一步增加光伏吸收并考虑风场影响,具体针对定点驻留或起点——终点问题等应用场景,将本方法与航向规划、气象输入相结合,研究三维空间加时间维度内的航线规划问题。高度剖面与航向对光伏吸收的影响可以解耦设计,但风场的高度分层对飞机位置保持影响较大。
