集中式重合闸及其可靠性分析
2020-04-14戚宣威王幸主裘愉涛朱可凡文明浩
戚宣威,王幸主,裘愉涛,王 松,朱可凡,文明浩
(1.国网浙江省电力有限公司电力科学研究院,杭州 310014;2.华中科技大学,武汉 430072)
0 引言
电力系统长期运行经验表明,发生在架空线路上的故障大多为瞬时性故障,而自动重合闸能在断路器动作后实现自动重合,大大提高了瞬时性故障下电力系统的可靠性和稳定性,极大缩短了停电时间,减少了线路的停电次数[1-4]。目前自动重合闸功能通常配置在断路器保护中[5-8]。随着大量智能变电站的设计建设,继电保护已从就地化布置逐渐发展为多层级布置,且采用双重化配置,使继电保护的性能大大得到提升[9-11]。然而自动重合闸装置仍采用按断路器分散式布置,在双重化保护配置下,存在着重合闸配合困难等问题[8-9]。
已有文献针对自动重合闸装置的工作原理、配合策略等方面开展了相关研究。文献[7]分析了两起由于现场重合闸装置与操作回路不一致,导致断路器保护的重合闸功能未正常动作的事故。文献[8]分析论证了断路器重合闸的配合方法,并改进现场回路接线,优化重合闸与其他保护的配合。文献[9]指出在已有双重化保护配置下自动重合闸装置存在误动的可能性,应在保持2 套重合闸操作回路独立性的基础上,设计必要的闭锁回路。文献[12]则指出在现场运行中,由于线路保护压板投退与自动重合闸装置的配合不当,造成系统运行中存在不少安全隐患。
然而上述研究均是基于自动重合闸按断路器分散式布置提出的改进措施,对从根本上改进重合闸布置方式的研究较少。本文提出一种集中式重合闸布置方式,可在一套装置中实现多个断路器的重合闸功能。然后基于故障树的序贯蒙特卡罗算法对比分析了分散式重合闸、单重集中式重合闸与双重集中式重合闸配置方式的可靠性,并针对集中式重合闸系统的薄弱环节,论证了采用双重集中式重合闸配置方式的可行性。
1 集中式重合闸
现有重合闸装置通常与断路器保护配置在一起,以单间隔为例,传统重合闸配置如图1 所示。
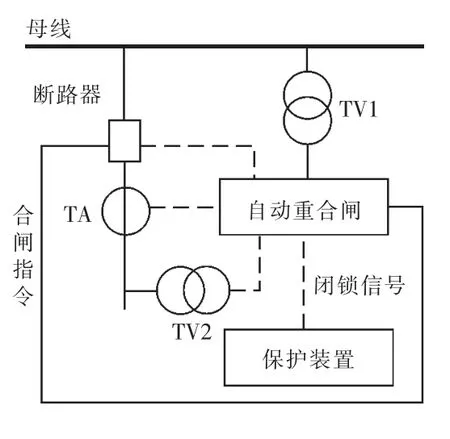
图1 传统重合闸配置示意
由图1 可知,分散式布置的自动重合闸装置采用“直采直跳”的方式。所采集的信息包括母线三相电压、线路侧电流、线路侧一相电压以及断路器状态量。另外,保护装置通过点对点光缆连接,传输闭锁GOOSE(面向通用对象的变电站事件)信号。若满足重合闸条件,则发送合闸指令至相应断路器。
双重集中式重合闸则采用“网采网跳”的方式实现重合闸功能,以一个间隔为例,其构建模式如图2 所示。
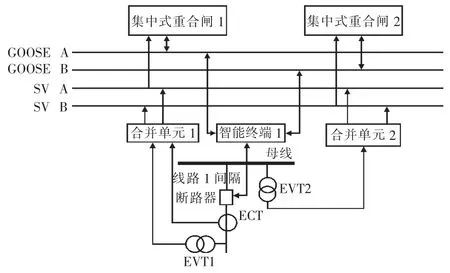
图2 双重集中式重合闸示意
集中式重合闸装置与传输网络均采用双重化配置,通过SV(采样值)网络获取线路间隔与母线合并单元中所采集的电气量信息,通过GOOSE网络获取ST(智能终端)所采集断路器位置信息及其他保护跳闸开入量,进行重合闸逻辑判断。对于多间隔而言,各间隔可通过相同方式接入SV 和GOOSE 网中,由采用双重化配置的集中式重合闸装置实现多间隔重合闸功能。当满足重合闸条件后,通过GOOSE 网络向相应ST 发出断路器重合闸命令。每个间隔可以实现单相重合闸、三相重合闸、禁止重合闸和停用重合闸4 种运行方式。
为了验证采用集中式重合闸配置方式并不会降低原有重合闸系统的可靠性,下面对集中式重合闸的配置方式进行可靠性分析。
2 集中式重合闸的可靠性模型
分析中采用FTA(故障树分析法)对集中式重合闸系统的各个环节进行可靠性建模。FTA 是一种将系统故障形成原因按树枝状逐级细化的图形演绎方法,系统故障的顶事件与中间事件和底层事件之间的逻辑关系用逻辑门分层联结起来,形成树形图,建模过程中需要用到符号及含义如表1 所示[13]。

表1 故障树符号及含义
2.1 整体可靠性
在目前继电保护的功能配置中,重合闸作为继电保护系统的一个功能模块,和继电保护系统共用一套硬件系统,如TA(电流互感器)、TV(电压互感器)、MU(合并单元)、CB(断路器)、ST 以及保护装置等。相关学者基于FTA 已经对继电保护系统的可靠性建模进行了大量研究,为集中式重合闸系统的可靠性建模提供了思路[14-15]。
根据继电保护系统失效类型的划分,集中式重合闸的失效类型也分为误动失效和拒动失效。不同的是,在电力系统的运行中,重合闸的作用是判断是否满足合闸条件然后发出合闸命令合上断路器,而继电保护装置则是判断系统发生故障然后发出跳闸命令跳开断路器。因此重合闸的误动失效是指重合闸在运行过程中因某环节失效导致断路器误闭合,而拒动失效则是指重合闸在运行过程中因某环节失效导致断路器合闸失败。因此,基于FTA 建立集中式重合闸系统的整体可靠性模型如图3 所示。
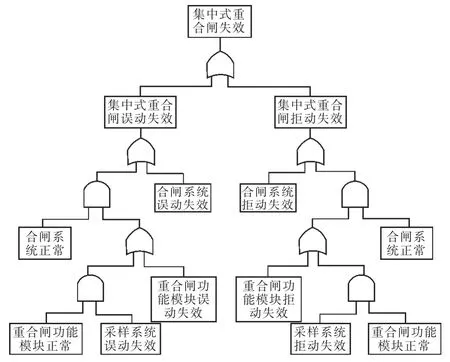
图3 集中式重合闸的整体可靠性模型
下面对图3 中的合闸、采样以及重合闸功能模块等中间事件进一步进行可靠性建模。
2.2 合闸和采样
对集中式重合闸的合闸系统来说,其可靠性评估范围为重合闸输出至断路器。因此,合闸系统误动失效包括2 种情况:断路器本身发生误动失效;在CB 正常的情况下,ST 发生误动失效。合闸拒动失效包括3 种情况:断路器本身发生拒动失效;GOOSE 通信网络失效,无法发送合闸命令至智能终端;ST 本身发生拒动失效。因此合闸系统的可靠性模型如图4 所示。
重合闸的启动需要满足断路器在分位和线路无流2 个条件,启动之后进一步进行检无压和检同期操作,以判断是否满足合闸条件。因此重合闸在运行过程中需要采集电压、电流等信息量以及断路器的实时状态信息,故可建立采样系统的可靠性模型如图5 所示。
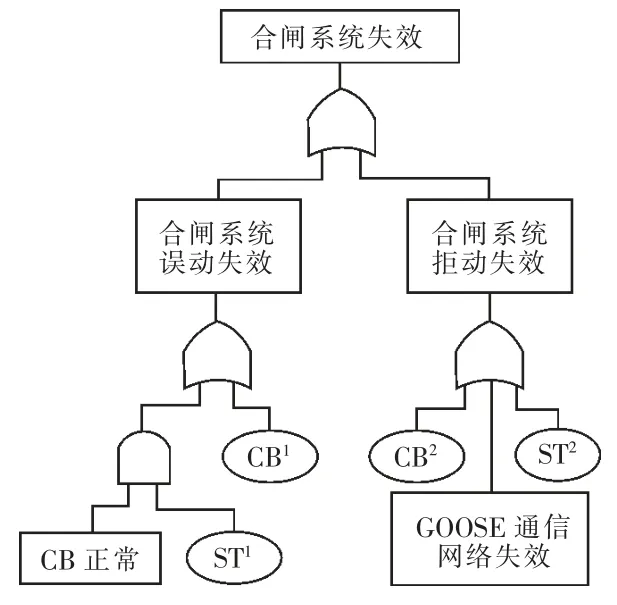
图4 合闸系统的可靠性模型
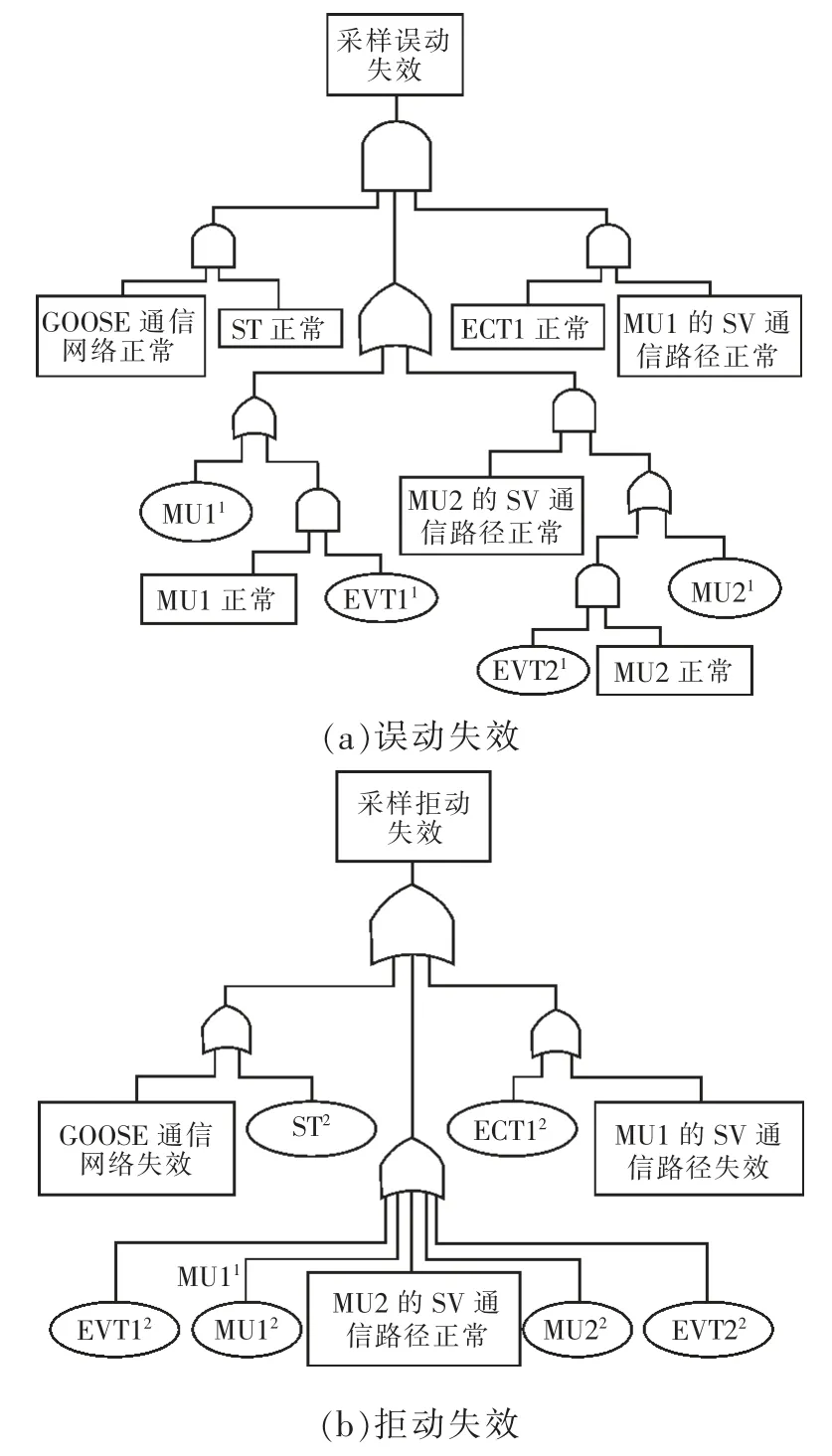
图5 采样系统的可靠性模型
2.3 通信网络
通信网络分为SV 和GOOSE 两种,其中SV通信网络范围是从MU 的输出到重合闸的输入,而GOOSE 网络则是从重合闸输出到ST 的输入,两者在SW(交换机)和OP(光纤)布置上具有对称性。以SV 通信网络为例,在双重化配置的情况下,2 个间隔配置2 台间隔SV 交换机,1 个间隔的MU 分别接入2 台间隔SV 交换机,全站配置2 台SV 中心交换机,分别接至2 台集中式重合闸装置。因此,对于SV 通信网络来说,从MU至重合闸共有4 条通信路径,4 条通信路径全部失效则SV 通信网络失效。GOOSE 网络类似。SV通信网络的一条通信路径如图6 所示,图中OP、间隔SV 交换机、中心SV 交换机是一种串联关系,因此其可靠性模型如图7 所示。

图6 一条SV 通信路径的结构
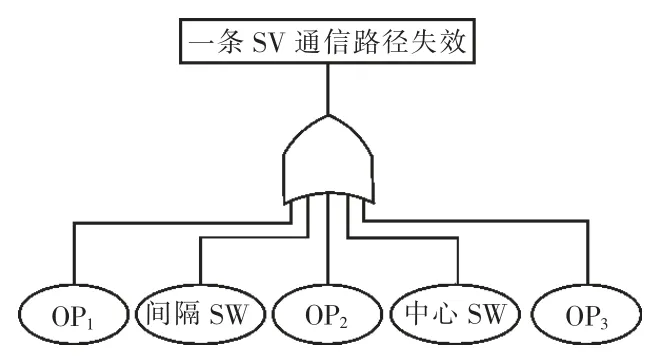
图7 一条SV 通信路径的可靠性模型
2.4 重合闸功能模块
由于重合闸功能模块和继电保护装置共用一套硬件系统,参考相关文献对继电保护装置本体的可靠性模型研究[16],则重合闸功能模块可分为CPU(处理器模块)、MEM(存储模块)、SI(开关量输入模块)、SO(开关量输出模块)、EI(电气量输入模块)、PSU(电源模块),以及由于软件失效和人为失效导致重合闸功能模块失效。因此重合闸功能模块的误动和拒动失效模型如图8 所示。
3 基于FTA 的蒙特卡罗算法
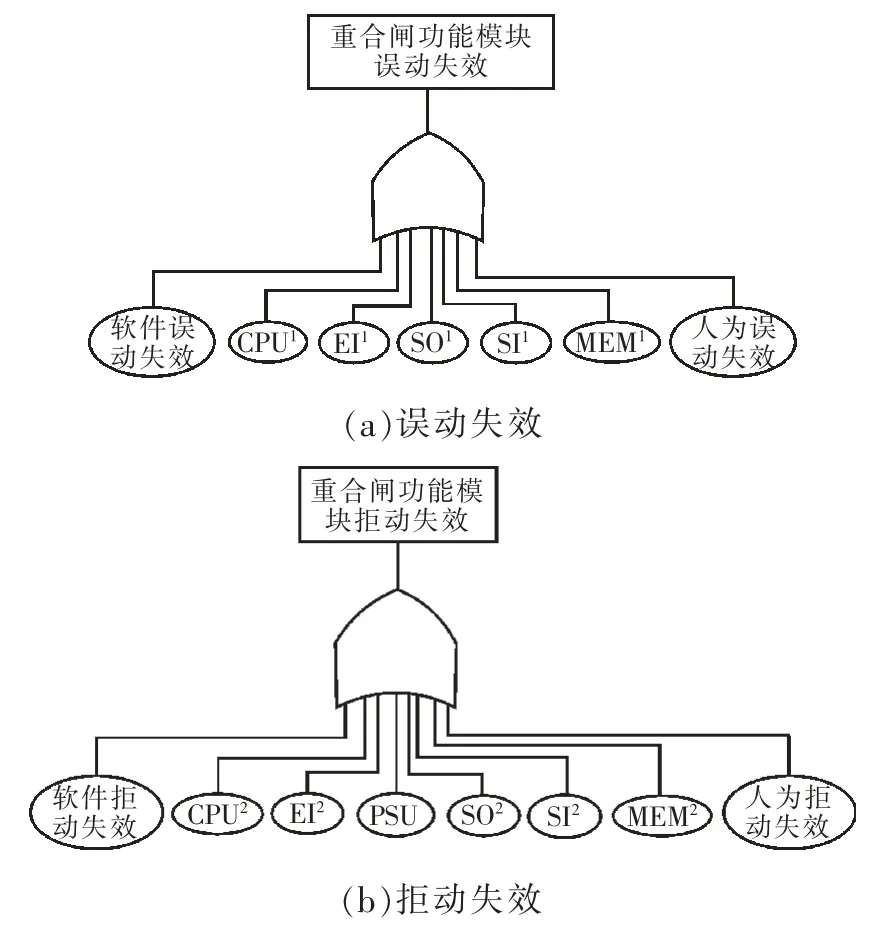
图8 重合闸功能模块失效模型
蒙特卡罗方法开创于20 世纪40 年代,它以大数定理为理论依据,以模拟抽样反映系统可靠性行为,属于模拟法。与可靠性框图、马尔科夫状态空间法等传统可靠性分析法相比,蒙特卡罗方法具有以下优点:在一定的精度要求下,蒙特卡罗方法的抽样次数与系统的规模无关,对系统的维数不敏感;用蒙特卡罗方法评估可靠性,不但能够获得概率性指标,而且能够得到频率和持续时间指标,得到的可靠性信息更加丰富、实用;基于蒙特卡罗方法的程序数学模型相对简单,对故障树底事件的失效分布类型也没有限制,并且容易模拟随机因素和系统的校正控制措施,因此计算结果更加符合工程实际[17-18]。
下面以两组件构成的串联系统为例,说明基于FTA 的蒙特卡罗算法评估系统可靠性的思路。两组件系统的故障树模型如图9 所示,由于是串联关系,则组件1 失效和组件2 失效任一底事件发生时都会导致顶事件系统T 失效发生。
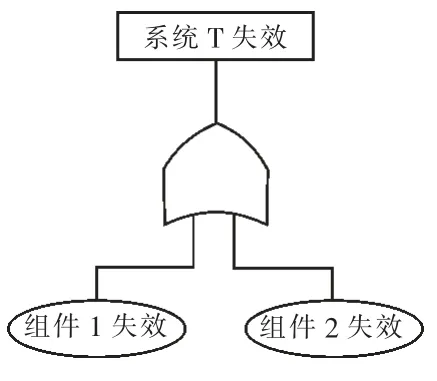
图9 两组件串联系统的故障树模型
组件或系统失效状态用“1”表示,正常状态用“0”表示,则基于FTA 的序贯蒙特卡罗仿真过程示意如图10 所示。各个底事件初始时刻均为正常状态,之后底事件的状态变化时间通过抽样得到,得到最大仿真时间Tmax内各个底事件的状态变化时序,然后根据系统故障树的结构函数,代入各个时间段内所有底事件的状态参数,得到系统状态的变化时序。
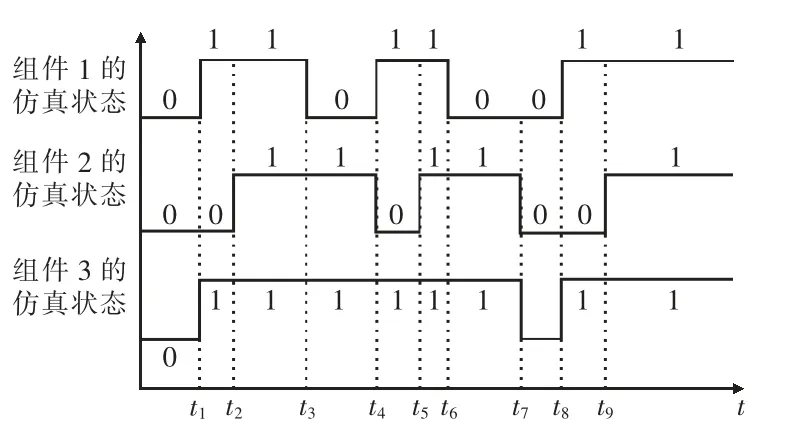
图10 基于FTA 的序贯蒙特卡罗仿真过程示意
假设系统所有底事件的失效时间和修复时间均服从单参数的指数分布,参数分别为λ 和μ,则底事件在一次“正常-失效”的周期变化中失效抽样时间t 和修复抽样时间t′,分别为:
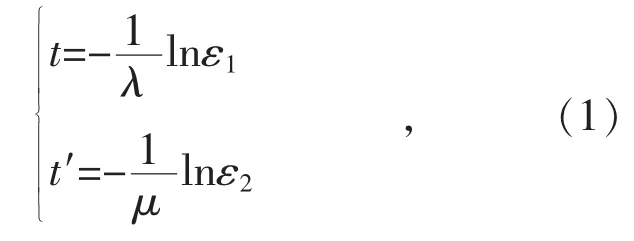
式中:ε1和ε2分别为区间[0,1]上均匀分布的随机数。
则在仿真过程中第j 个底事件在第i 次仿真的状态变化时间为:

将tij按式(3)进行排序,当tmj>Tmax时,则结束本次仿真。

综上,基于FTA 的蒙特卡罗算法步骤为:
(1)根据底事件失效时间和修复时间服从的分布类型,输入所有底事件的参数,设置最大仿真时间为Tmax。
(2)令仿真时间tsim=0,记录系统正常的时间tOP=0 和次数Am=0;记录系统失效的时间位tFL=0和次数Rm=0,设置各底事件正常。
(3)按式(1)—式(2)开始仿真,令m=1。
(4)m=m+1,tsim∈(tm-1,tm),确定各底事件在此区间的状态,根据系统结构函数判断系统状态。若结构函数值为“0”,则系统正常,记录tOP,Am=1;反之记录tFL,Rm=1。
(5)令tsim=tsim+tm-tm-1,若式(3)成立,则执行步骤(4),否则结束本次仿真。
(6)根据式(4)进行可靠性指标计算。

经过多次仿真,可靠性指标收敛后进行最终的统计分析。
4 仿真结果
图3—图8 所示可靠性模型中各个底事件的失效率和修复率参数如表2 所示[14,16]。所有部件的MTBF(平均无故障工作时间)和平均修复时间均服从单参数的指数分布,且误动失效率和拒动失效率各占部件失效率的1/2,最大仿真时间为106h。
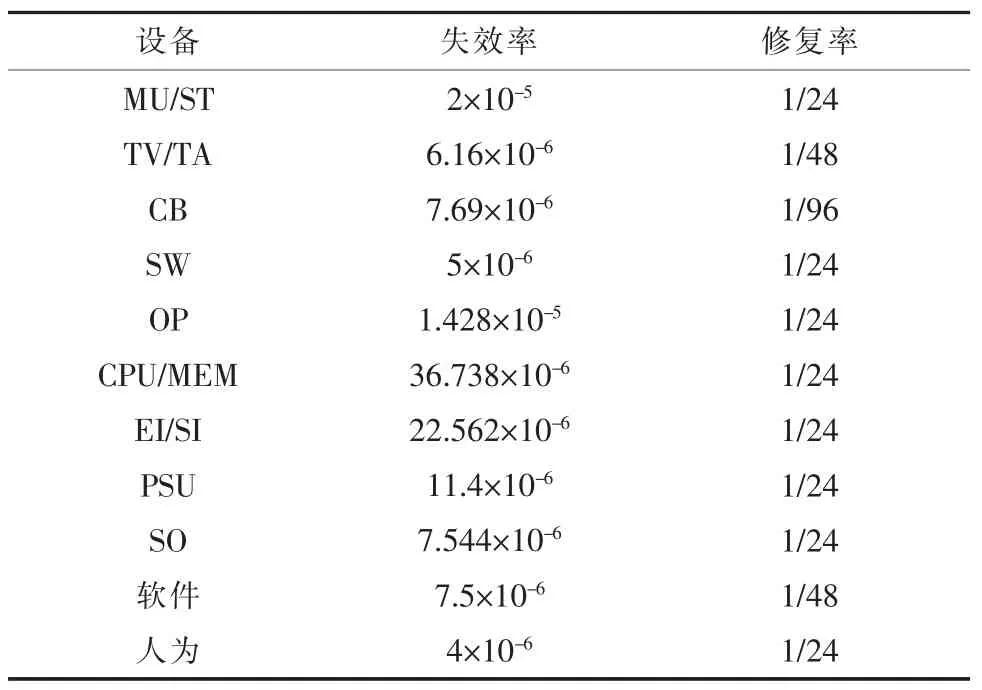
表2 集中式重合闸系统各底事件的失效率和修复率
4.1 不同重合闸方式的对比
一般认为继电保护系统属于可修复系统[18],本文认为重合闸作为继电保护系统的功能之一,也属于可修复系统。对于可修复系统,MTBF 反映系统或者部件在整个生命周期过程中平均两次故障之间的时间间隔,是表征系统可靠性的重要指标之一。
为了说明采用集中式重合闸的配置方式并不会降低传统分散式重合闸系统的可靠性,下面对比分析两者的MTBF。传统分散式重合闸的可靠性模型以及底事件的失效率和修复率参数可以参考文献[16];集中式重合闸根据配置情况又进一步分为单重配置集中式重合闸和双重配置集中式重合闸,基于故障树的可靠性模型,单重集中式与双重集中式的区别在于单重式的SV 网络、GOOSE 网络以及重合闸功能模块都是单重配置,配置如图11 所示。由图11 分析可得,基于FTA的单重集中式重合闸的可靠性模型底事件会减少,但是底事件之间逻辑关系与第2 节中类似,底事件的失效率和修复率参数仍如表2 所示。
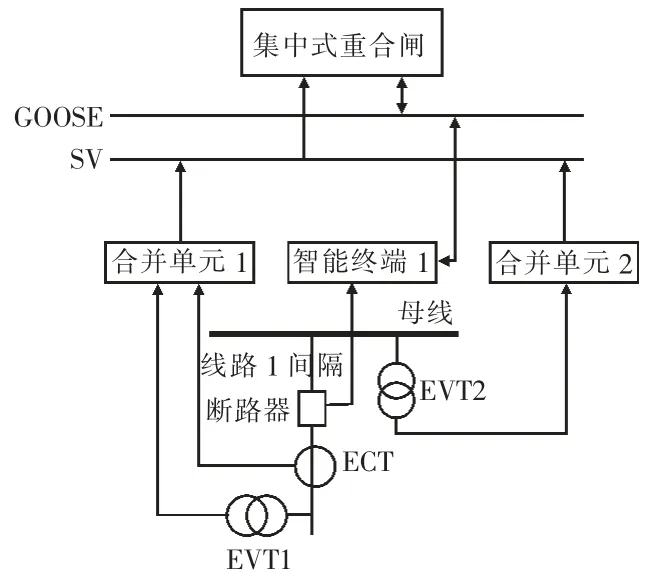
图11 单重集中式重合闸示意
经仿真计算,得到传统分散式重合闸、单重集中式重合闸和双重集中式重合闸的MTBF 如表3 所示。
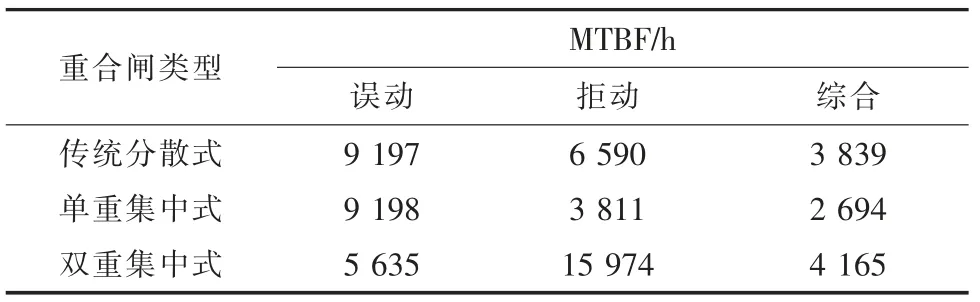
表3 3 种类型重合闸的MTBF
根据表3 可得,相比于分散式重合闸和单重集中式重合闸,双重集中式重合闸的拒动MTBF要高得多,而误动MTBF 相对较低。考虑到系统运行对重合闸的要求是保证在断路器因故障跳开的情况下可靠发出合闸命令,因此可以适当降低对误动的可靠性要求。此外,就全站而言,双重集中式重合闸的MTBF 最高,它并不会降低原有重合闸系统的可靠性,因此该配置方案是可行的。
4.2 部件概率重要度
部件的概率重要度就是底事件状态取“1”时、系统失效率和底事件状态取“0”时系统失效率之差,用来定量衡量各底事件对系统整体的重要程度。集中式重合闸系统部分部件的概率重要度如表4 所示。
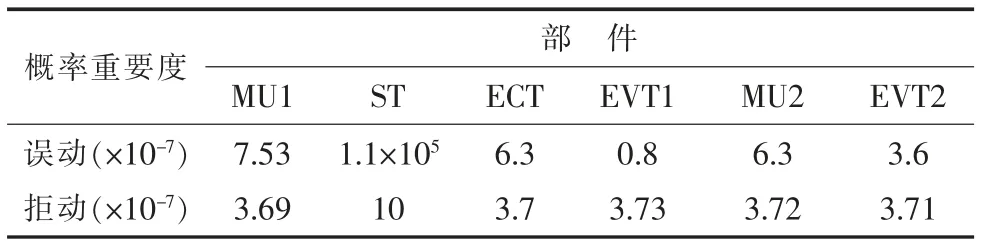
表4 集中式重合闸系统部分部件的概率重要度
从表4 可得,相比于误动概率重要度,各个部件的拒动概率重要度要大得多。此外,由于重合闸在运行过程中需要实时监测断路器的状态信息,因此ST 的概率重要度最高,故在实际操作中可以有针对性地对ST 制定检修策略。
5 结语
针对传统按断路器布置的分散式重合闸存在的接线复杂、可靠性不高等问题,本文提出了一种基于多间隔信息的集中式重合闸布置方式。该系统通过SV 网络获取线路与母线合并单元中所采集的电气量信息,通过GOOSE 网络获取ST 所采集断路器位置信息及其他保护跳闸开入量,进行重合闸逻辑判断。此外,通过基于故障树的序贯蒙特卡罗算法对比分析了分散式重合闸、单重集中式重合闸与双重集中式重合闸配置方式的可靠性,并分析了集中式重合闸系统的薄弱环节,论证了采用双重集中式重合闸配置方式的可行性。