过渡状态倾转四旋翼飞行器动量源模拟方法及气动特性研究
2020-04-13陈天予
陈天予,徐 逸,梁 壮,王 皓
(上海机电工程研究所,上海 201109)
0 引 言
倾转四旋翼飞行器[1]作为一种新型的飞行器,融合了固定翼飞机和常规直升机的优点,除了具备倾转双旋翼飞行器垂直起降、空中悬停、飞行速度快的优点之外,其载重能力更强,安全性更好,因此将被广泛应用在未来的高科技战争和空天防御体系建设中。
倾转四旋翼飞行器由于其独特的倾转旋翼/机翼构型,在由直升机模式过渡到飞机模式以及巡航高速前飞模式时,前机翼的尾流会影响后机翼附近的流场,后旋翼也处于前旋翼尾流干扰区域内,同时旋翼和机翼之间也会产生互相影响,导致其干扰情况更为复杂。因此,对这种飞行器进行气动特性研究,掌握其气动干扰规律,对于提高此飞行器的总体性能有着极大的意义。
国内外有关倾转四旋翼飞行器过渡状态气动特性的研究还比较少,但对倾转双旋翼飞行器的相关研究较多。CARLSON[2]把机翼划分为受旋翼尾流直接影响的滑流区和不受旋翼尾流直接影响的自由流区2个区域进行计算,但是未能计入不同的飞行器几何尺寸和飞行状态参数对其气动特性的影响。SHENG[3]等基于滑移网格技术对倾转四旋翼飞行器的非定常流场和气动特性进行了预测和分析并辅以试验验证。张铮[4]基于参数化建模的方法建立了适用于飞行力学分析的倾转旋翼/机翼气动干扰模型,计算了倾转旋翼不同前飞速度以及旋翼短舱倾转角下的气动干扰情况,最后通过相关风洞试验验证了方法的准确性。
本文针对某型倾转四旋翼飞行器,采用动量源方法构建了一个适用于该型飞行器旋翼/机翼气动特性分析的数值计算模型。在该方法中,对旋翼部分,利用作用盘模型添加动量源项来模拟旋翼转动,并划分了结构网格;对机身、机翼、短舱部分,划分了非结构网格。首先,对孤立旋翼的升力和功率进行了模拟计算并与实验结果进行对比,验证了动量源方法的有效性;然后,针对某型倾转四旋翼飞行器倾转过渡状态旋翼与机翼的气动特性进行了分析研究,得到了气动干扰的规律,可以有效支撑飞行器总体设计。
1 主控方程
1.1 主控方程形式
本文通过求解湍流N-S方程建立旋翼系统的数值分析模型,带有动量源项的三维定常不可压RANS方程如式(1)所示。

式中:W为守恒变量;Fc为笛卡尔坐标系下的无黏通量;Fv为黏性通量;S为动量源项;V为控制体体积,en为微元面外法矢单位向量。
1.2 动量源项建立
本文基于叶素理论求解离散形式的动量源项,将桨叶沿展向离散成有限个微元,求解出桨叶微元对作用盘上每个网格单元区域的冲量,从而建立在单位时间内需要在微元中心通过的网格单元中加入的动量源项。
图1为旋翼桨叶微元速度示意图,其中:R为旋翼半径;r为桨叶微元所在位置的半径;dr为桨叶微元在半径r处的径向长度。假设在坐标系下流场速度为(vx,vy,vz),分解到桨叶微元剖面坐标系速度为 (vt,vr,vi),它们之间的关系如式(2)所示。

式中:vt沿桨叶叶素切向;vr沿桨叶展向;vi垂直于桨盘平面向上;φ为桨叶方位角。已知桨叶旋转转速为Ω,桨叶安装角为θ,来流角为β,则可求得当地马赫数Ma和翼型迎角α。根据翼型的升力和阻力特性曲线可以查表得到对应迎角下的升力系数Cl和阻力系数Cd。
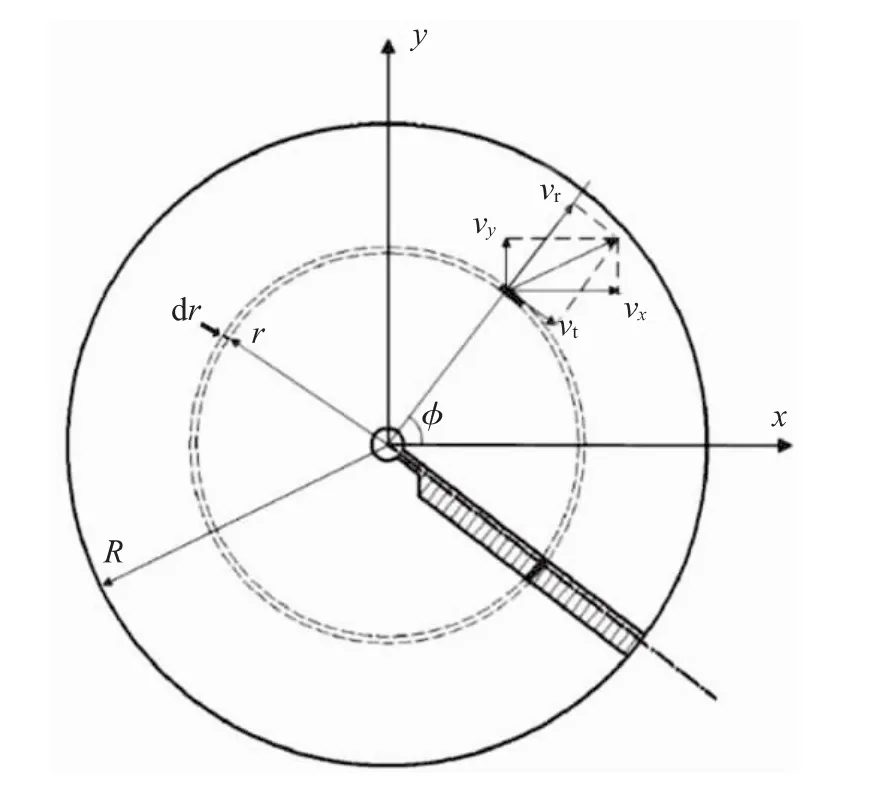
图1 旋翼桨叶微元速度示意图Fig.1 Velocities of rotor blade element
图2为桨叶剖面的速度和受力图。桨叶叶素微元产生的升力dL和阻力dD如式(3)所示,其中:ρ为大气密度;v为桨叶微元处的来流合速度;c为桨叶微元所在位置的弦长。

将升力dL和阻力dD转化到桨盘直角坐标系下,得到垂直于桨盘平面的气动力dT和桨盘平面的气动力dQ,如式(4)所示。

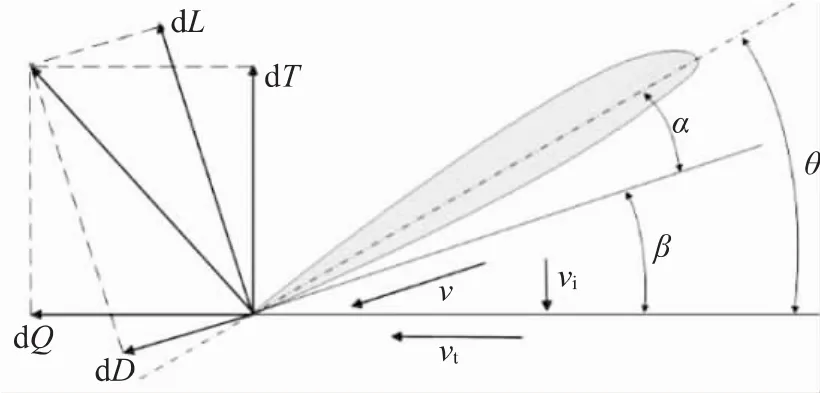
图2 桨叶剖面的速度和受力图Fig.2 Velocities and forces of blade section
假设将旋翼计算区域分为n层,每层高度为h,二维单元面积为rdrdφ,则体积V=rdrdφnh。桨叶片数为Nb。在桨盘直角坐标系下桨叶剖面受到气流的作用力为dF=dT+dQ,将其反作用力施加到微元对应的三维网格单元中,则单位体积内获得的动量源项如式(5)所示。

2数值离散方法
2.1 空间离散
CFD中空间离散的方法包括有限体积法、有限元法、有限差分法等。其中,有限体积法能将空间离散和时间推进完全分开,可以保证离散方程的守恒特性,且计算效率较高,因此本文采用有限体积法对旋翼流场控制方程进行空间离散。
由于各个控制体的体积不随时间变化,可将式(1)改写成

空间离散后,得到关于时间的常微分方程为

式中:m表示控制体的面数编号,m=1,…,N;ΔSm表示控制体中各个面的面积。
2.2 时间离散
采用显式五步Runge-Kutta格式的时间离散,这种离散方法具有较好的稳定性和衰减特性,对于定常解的计算精度影响较小,其时间推进可以表达为

式中:n表示当时的时间步数;n+1表示新的时间步数;R为流场残值;am(m=1,…,5)分别为

为了减小计算开销,只在第一步计算人工耗散项,且后续各步计算中人工耗散项保持第一步的值不变。
3 算例验证和分析
3.1 算例验证
本文采用文献[5]中的旋翼作为算例,对动量源方法进行验证。该旋翼的主要参数见表1。

表1 算例旋翼参数Tab.1 Parameters of the example rotor
计算所使用的结构网格如图3所示。

图3 算例所使用的结构网格Fig.3 Structural grid of the example
图4和图5是计算得到的不同转速下孤立旋翼的升力、功率与文献[5]中的实验值进行对比的情况。可以看出,应用动量源方法数值模拟得到的旋翼升力、功率与实验值在总体上基本吻合,可以满足工程计算的需要。

图4 孤立旋翼升力计算值与实验值对比Fig.4 Comparison of single rotor lift between CFD results and experimental data

图5 孤立旋翼功率计算值与实验值对比Fig.5 Comparison of single rotor power between CFD results and experimental data
3.2 飞行器倾转过渡状态性能分析
本文分析的倾转四旋翼飞行器外形如图6所示。

图6 某型倾转四旋翼飞行器示意图Fig.6 Quad tilt rotor aircraft
倾转四旋翼飞行器的主要参数如表2所示。
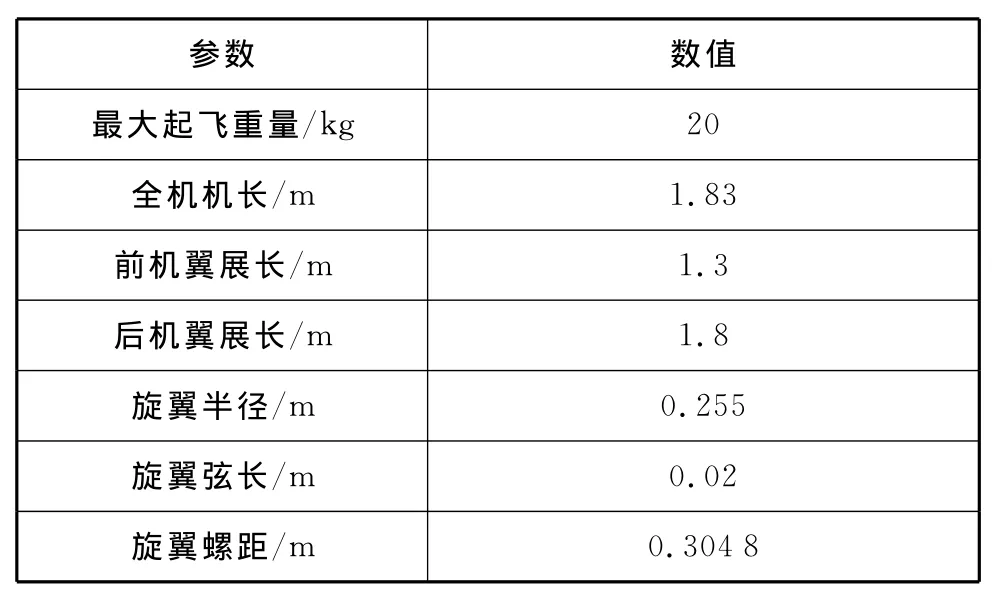
表2 倾转四旋翼飞行器主要参数Tab.2 Parameters of the tilt rotor aircraft
对飞行器旋翼划分结构网格,机身划分非结构网格,然后采用混合网格技术合并结构网格与非结构网格,全机网格如图7所示。

图7 全机网格示意图Fig.7 Grid of the whole aircraft
本文将倾转四旋翼飞行器的倾转过渡过程简化为准定常状态进行计算分析,选取过渡过程中的某些特定角度来进行模拟,整个过渡过程中旋翼转速为固定值,取5 800r/min,具体工况参数如表3所示。

表3 倾转过渡阶段工况参数Tab.3 Parameters of working conditions in conversion state
这里给定的工况参数都是基于倾转四旋翼飞行器简单的飞行动力学模型得到的。通过飞行动力学模型建立飞行器的“倾转过渡走廊”[6],从倾转过渡走廊中取出状态点进行模拟计算。倾转过渡走廊如图8所示。

图8 倾转四旋翼飞行器倾转过渡走廊Fig.8 Corridor of the quad tilt rotor aircraft in conversion state
计算各个状态点下倾转四旋翼飞行器的各项性能参数,将旋翼产生的总拉力按倾转角度和机身迎角分解,再结合机身产生的升力与阻力,便可以得到整个倾转四旋翼飞行器在风轴系下的升力与阻力变化曲线,其升力变化如图9所示。从图9中可以看出,随着短舱倾转角度增大,旋翼提供的升力逐渐减小,机身产生的升力逐渐增大,这两项产生的总升力总是大于全机的总重,这说明飞行器在倾转过渡状态中的升力可以满足维持重力的需要。从图9中还可以看出,飞行器总升力在倾转过渡初始阶段较小,仅稍大于全机重力,随后迅速增大,在短舱倾转角超过30°后升力开始下降。这是因为在初始阶段升力的主要来源是旋翼,旋翼总拉力本身处于上升状态,且此时拉力分解到升力矢量方向的比例也比较大,因此飞行器总升力不断增加。而当倾转角较大时,旋翼总拉力下降,且分解到升力矢量方向的比例也变小了,而此时由于前飞速度还不够,机身升力的增加速度小于旋翼升力的衰减速度,因此飞行器总升力呈下降态势。而当短舱倾转角达到75°时,总升力又显示一个转折上升的趋势。这是由于倾转四旋翼飞行器有一段随同短舱倾转的机翼,在短舱倾转角小于75°的情况下,此段机翼的迎角过大,一直处于失速状态,而在短舱倾转角超过75°度后,机翼迎角逐渐正常,且处于一个升力系数较大的迎角状态。因此,它可以产生较大的升力,使得飞行器的总升力再次上升。

图9 飞行器升力随倾转角度变化Fig.9 Lift of the quad tilt rotor aircraft changing with tilting angles
倾转四旋翼飞行器在风轴系下的旋翼前向拉力和机身阻力变化曲线如图10所示。可以看出,旋翼产生的拉力始终大于机身阻力,这说明旋翼拉力可以满足倾转过渡状态下飞行器的加速需求。倾转过渡状态下机身的阻力和旋翼的拉力都呈现先变大后变小的趋势。机身阻力产生这样的变化是由于短舱倾转角变化导致机身迎风面积变小,继而使得来流速度增大;旋翼拉力产生这样的变化是由于旋翼产生的总拉力的矢量分解方向也随着短舱倾转角在变化,同时旋翼也受前方来流影响。从图10中还可以看出,在短舱倾转角较小的时候,旋翼拉力与前飞阻力的差距是比较小的,而在倾转角较大的时候,旋翼拉力和前飞阻力之间的差距变大了。这是由于在倾转角较小时,随短舱倾转的机翼的迎风面积较大,会产生极大的前飞阻力,这也使得全机的前飞阻力较大;而随着短舱倾转角的增大,此段机翼的迎风面积减小,阻力下降,全机的前飞阻力也随之下降。从图10中还可以推断出,短舱倾转角较小时,飞行器的加速度比较小,可能需要较多时间进行加速,过渡过程较慢;而当短舱倾转角较大时,前飞加速度较大,加速时间较短,过渡时间也较短。

图10 飞行器拉力/阻力随倾转角的变化Fig.10 Trust and drag of the aircraft changing with tilting angles
3.2 飞行器倾转过渡状态气动干扰分析
图11给出了有/无旋翼干扰状态下机身的升力随短舱倾转角变化的趋势。

图11 有/无旋翼干扰下机身升力随倾转角变化Fig.11 Lift of the fuselage varying with tilting angles with or without rotor
由图11可知,短舱倾转角非零状态下,带旋翼的机身升力均大于无旋翼的机身升力,这说明倾转过渡状态中旋翼的干扰对飞行器有增升作用;倾转角为零(悬停状态)时,带旋翼的飞行器存在部分向下载荷,使得全机升力小于无旋翼状态下的全机升力。
图12给出了有/无旋翼干扰状况下机身阻力随倾转角的变化趋势。由图12可知,整个倾转过渡状态中,有旋翼时的机身阻力都大于无旋翼状态下的机身阻力,这说明旋翼的干扰使飞行器遭遇更大的阻力,也影响了其加速性能。从图12中还可以看出,在倾转角为30°~45°时,机身阻力最大,此时旋翼应增加转速以获得较好的加速度来实现平稳过渡。
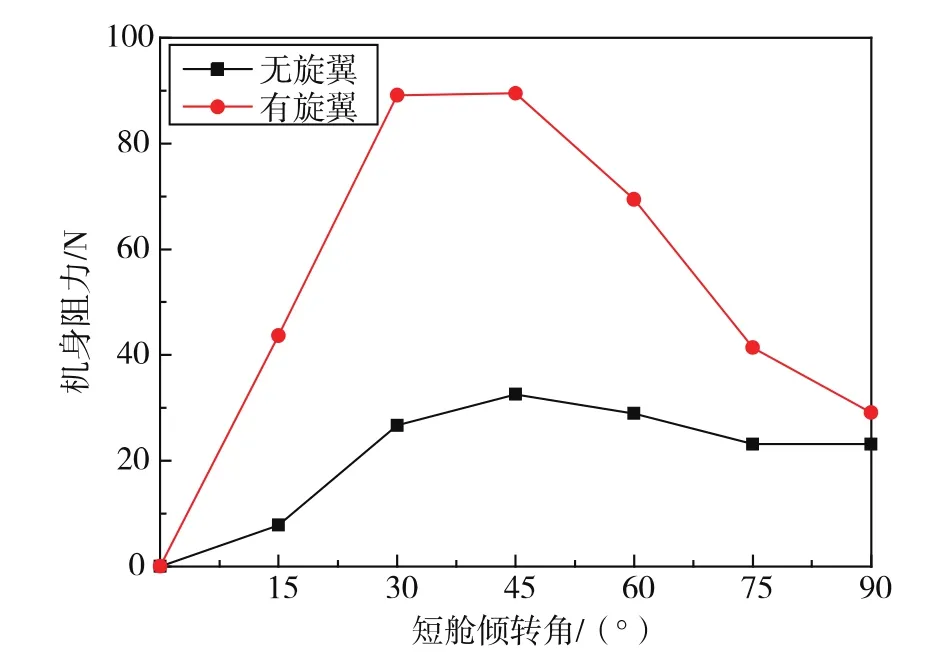
图12 有/无旋翼干扰下机身阻力随短舱倾转角的变化Fig.12 Drag of the fuselage varying with tilting angles with or without rotor
图13给出了不同短舱倾转角下的机身表面压力分布对比。从图13中可以看出,倾转过渡时旋翼对飞行器产生的主要影响体现在倾转翼段。在倾转过渡初始阶段,旋翼会对倾转翼产生明显的干扰作用,对其他气动部件产生的影响则较小;随着倾转角的不断增大,旋翼作用产生的影响逐步减小,这是由于在倾转过渡阶段,伴随着飞行器的加速,前方来流速度不断增大使得其在整个飞行器外流场中起的作用越来越大,从而旋翼产生的干扰作用的比重减小。

图13 不同倾转角度下的机身表面压力分布对比Fig.13 Pressure contour of fuselage at different tilting angles

4 结束语
本文基于动量源方法,针对某型倾转四旋翼飞行器倾转过渡状态气动特性开展了研究,得到了如下结论:
1)经过模拟计算,本文所研究的倾转四旋翼飞行器理论上可以完成整个倾转过渡过程,整个过渡期间不会因为升力不足而掉高度,也不会因为拉力不足而达不到预定速度。
2)在整个倾转过渡过程中,旋翼对倾转四旋翼飞行器起到了增升且增阻的作用。这一方面使得飞行器拥有更大的升力,减小了掉高度的隐患;另一方面也使得飞行器加速性能下降,需要更多的时间来达到所需的速度。同时,本文的所有工况都是建立在旋翼转速为5 800r/min这一额定转速下的,真正实施倾转过渡时可以增大旋翼转速,从而使得倾转过程更加稳定可靠。
