作动器伺服控制系统典型故障研究
2020-04-12李胜国韩冰
李胜国 韩冰
摘要:本文对作动器的工作原理进行了说明,针对作动器伺服控制系统的故障进行定性分析,并对双闭环系统下的典型故障模式进行了推演。
关键词:伺服作动器;控制原理;典型故障;分析;
Keywords:actuator;control principle;typical faults;analysis
0 引言
作动器作为飞机运动的舵面执行机构,是现代飞机飞控系统的重要组成部分,在稳定性、安全性方面有很高的要求。本文通过对该类产品的工作原理进行计算、分析,推演其典型故障的主要表现,特别针对双闭环回路控制系统,通过定性计算还原了该类产品的典型系统故障模式,为解决后续产品在维修、排故及使用过程中出现类似问题提供了理论支撑。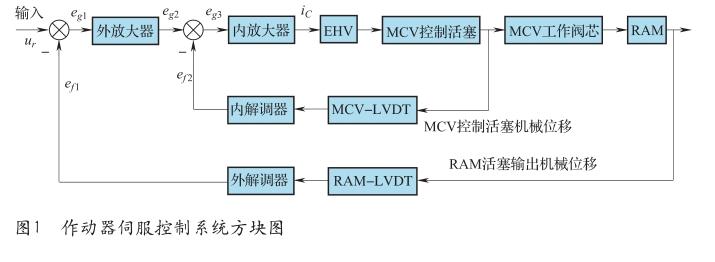
1 作动器伺服控制原理
伺服作动器的闭环控制原理框图如图1所示。
由图1可知,作动器伺服控制系统由内闭环回路和外闭环回路组成。内闭环由内放大器、EHV、MCV、MCVLVDT及内解调器组成,外闭环由外放大器、MCV工作阀芯、RAM、RAMLVDT及外解调器组成。
在伺服系统正常工作模式下,外界输入一个控制信号ur(假设为正值),该信号经过外、内放大器后转变为电流信号iC(正值),EHV在电流iC的作用下线圈产生电磁力矩,喷挡机构开始工作,在压力差的作用下使MCV控制活塞正向移动。由于MCV控制活塞与MCV工作阀芯在结构上被固定在一起,MCV工作阀芯也随MCV控制活塞正向移动,打开控制油路,使RAM的活塞正向伸出。RAM的活塞将按信号指令带动舵面运动,并且RAM-LVDT将RAM的活塞位移转换为电信号,反馈至伺服系统前端。

如输入负相阶跃信号,其原理相同,RAM的活塞最终达到平衡状态的位置为反向极限位置。
2.3 系统内、外回路均开环的故障模式
该状态下通常指的是整个MCV及RAM线位移传感器同时出现故障,丧失全部闭环反馈信号,系统已不具备伺服控制特性,完全处于开环工作状态。
当输入正向阶跃信号ur时,工作过程如下:
如输入阶跃为负,MCV控制活塞与RAM活塞最终达到平衡时处于反向极限位置。
由以上分析可知,系统完全开环故障的典型特征为:伺服控制系统失效,只要控制信号ur不为0,则MCV工作阀芯与RAM活塞均处于正向(或反向)极限位置,作动器RAM都会输出一极限位置,该位置极性与输入信号一致。
3 结论
当作动器系统在内回路开环、外回路闭环的情况下,故障表现为作动器循环振荡,无法输出系统指定的信号指令。在内回路闭环、外回路开环的情况下,故障典型特征是伺服系统不受控,输入任意一个控制信号,作动器RAM都会输出一极限位置,该位置极性与输入信号一致。当系统内外回路均处于开环的状态时,伺服控制系统失效,只要控制信号ur不为0,则MCV工作阀芯与RAM活塞均处于正向(或反向)极限位置,作动器RAM都会输出一极限位置,该位置极性与输入信号一致。
在对作动器故障特别是整机故障、飞行姿态故障进行分析的过程中,可对照以上结果进行深度研究。例如,某作动器事件从机理上分析即是出现了系统外回路開环、内回路闭环状态,导致作动器RAM输出一极限位置,最终引起飞机后仰、倾翻。此外,飞行过程中的颠簸、漂摆是否因作动器内回路某元件失效导致内回路开路引起,也可通过上述原理进行分析和解释。
作者简介
李胜国,主要从事航空液压作动器修理研究。
韩冰,主要从事航空装备修理质量监督。
