高速列车低频晃车在线检测及控制
2020-04-12邓辰鑫周劲松夏张辉
邓辰鑫,周劲松,夏张辉,宫 岛,孙 煜
(同济大学铁道与城市轨道交通研究院,上海201804)
随着我国轨道交通的迅速发展,高速列车的运行速度、载重和发车频次大幅提升,车辆振动问题日益凸显。低频晃车是高速列车的一种异常振动,对高速列车的运行平稳性和安全性构成了极大的威胁[1]。由于导致晃车的因素众多,如车辆关键部件的性能演变、轮轨磨耗以及外界横风激扰等,目前低频晃车的形成机理[2]尚无统一定论,也没有固定的治理方法。
对高速列车的晃车现象进行在线检测时,检测方法须满足实时性和准确性要求。大部分信号处理方法,如基于傅里叶变换的频域分析等,无法满足实时 性 和 准 确 性 要 求[3]。Huang[4]提 出 了Hilbert-Huang 变换,利用经验模式分解(EMD)把信号分解成若干本征模态函数(IMF)分量,再对分量进行Hilbert 变换,得到时频能量的分布。针对信号局部特征进行分析,从时间尺度入手,获得具有不同尺度特征的IMF分量[5]。该方法的优势在于能提供准确的局部时频特征[6],并且满足晃车信号在线检测的实时性要求,对指定频段有强分辨力。
检测到车辆发生低频晃车时,启动主动惯容元件吸收车辆的低频振动[7]。Smith[8]提出的惯容器具有能以小质量实现大质量的特性,极大地拓展了悬架的设计思路。文献[9]中给出了惯容器装置,并对其性能展开了试验研究。结果表明,该装置在0.1~30.0 Hz 频率范围内有显著的吸振效果。惯容式动力吸振器目前已在汽车领域得到运用,它能有效地抑制车身共振,显著改善车辆的乘坐舒适性[10]。
基于高速列车晃车的实测振动信号,运用Hilbert-Huang 变换提取实测信号的低频振动能量,并定义谱能比来描述晃车特征,实现对车辆运行状态的在线检测。建立高速列车横向振动模型,利用主动惯容式动力吸振器来吸收晃车的低频振动,并对比控制前后的频响特性和时域仿真结果。
1 经验模式分解和Hilbert变换
1.1 经验模式分解
经验模式分解[4]可将任意信号x(t)分解为

式中:x(t)为原始信号;FIMF,i(t)为第i 个IMF 分量;rn(t)为剩余分量。该方法规定[4]IMF分量中全程极值点和过零点个数必须相等或至多相差一个,并且任意点处极大值包络线和极小值包络线的均值为零。图1 为经验模式分解流程,图中hj(t)表示中间变量。具体分解步骤如下所示:
(1)拟合原始信号x(t)的极大值、极小值包络线u(t)和d(t),取两者均值m(t)作为均值包络线。

图1 经验模式分解流程Fig.1 Flow chart of EMD
(2)x(t)减去m(t)得到低频信号n(t)。重复k次后得到低频信号nk(t),若满足IMF分量规定则作为第1 个IMF 分量;否则,重复步骤(1)和(2)。通常,ε精度下均值为零的条件近似为[5]

(3)令新信号r1(t)=x(t)-FIMF,1(t),并代替x(t)。重复步骤(1)和(2)得到后续的IMF 分量,直至FIMF,n(t)或rn(t)小于阈值、或rn(t)为单调函数或常量。
1.2 Hilbert变换
对IMF分量做Hilbert变换,如下所示:

构造解析函数

式中:Ai(t)和φi(t)分别为幅值函数和相位函数。由此得到瞬时频率

并求得原始信号的Hilbert谱和边际谱,如下所示:

2 低频晃车在线检测
2.1 实测数据
以250 km·h-1的运行速度对车辆进行测试,采集该车辆车体横向振动数据,如图2所示。由图2可知,约20 s后出现连续的低频晃车现象。

图2 原始数据Fig.2 Raw data
将整个时间历程分为非晃车段、过渡段和晃车段,分别对非晃车段和晃车段两段数据进行频谱分析,如图3 所示。非晃车段的极值频率出现在0.63 Hz 和1.54 Hz 附 近,晃 车 段则 出 现在0.64 Hz 和1.45 Hz附近。对比第1个峰值,两者的频率接近且晃车段的幅值比非晃车段小32%;对比第2个峰值,晃车段幅值为非晃车段的3倍。从非晃车段到晃车段,车体横向振动的低频能量向1.45 Hz处集中。
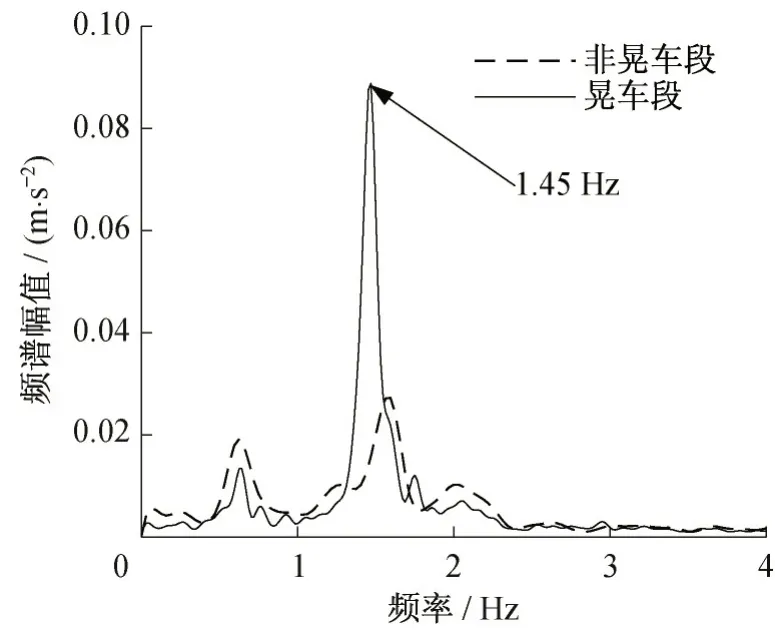
图3 非晃车段和晃车段频谱对比Fig.3 Contrast of spectrum between non- and swaying segment
为了清楚地描述各时段低频成分占整体振动的比例,将0~5 Hz的振动能量占总振动能量的比值记为低频能量比α,即

式中:Sx(f)表示功率谱;fs表示分析频率。功率谱在某频段上的积分表征振动能量。
表1为各时段的低频能量比。不同时段的低频能量比接近,并都处于较高水平。非晃车段和晃车段低频能量比的差值不到10%,分辨力不强。为了保证快速傅里叶变换的频率分辨率,必须基于一定的分析时长,因此不满足在线检测的实时性要求。
均方根值可衡量某时间段内振动水平的高低。图4 显示了整个历程中振动加速度均方根值的变化,计算窗长为1.5 s。非晃车段均方根值总体数值较低;晃车段均方根值存在较大波动,部分与非晃车段接近。因此,均方根值不满足在线检测的准确性要求。
2.2 经验模式分解和Hilbert变换
从晃车段和非晃车段分别选取5 s 时长的样本做经验模式分解和Hilbert 变换,第i 个IMF 分量的能量


表1 不同区段低频能量比Tab.1 Low-frequency energy ratio at different segments

图4 均方根值分布Fig.4 Distribution of root-mean-square value
式中:hi(f)和Ei分别表示第i 个IMF 分量的边际谱和能量。定义第i 个IMF 分量的能量比βi来表征该分量占总振动能量的水平,即
图5 显示了2 个样本前5 个IMF 分量的能量比分布。非晃车段的最大能量比分量为第2个IMF分量,能量比约为46%;晃车段的最大能量比分量为第4个IMF分量,能量比约为51%。

图5 IMF分量能量比分布Fig.5 Distribution of energy ratio of IMF components
图6和图7 分别显示了非晃车段样本和晃车段样本的最大IMF 分量及时频特性。由图6 可知,该分量没有明显的低频振动成分,频率随时间变化的平均值在40 Hz左右。由图7可知,该分量为低频振动成分,频率随时间变化的平均值为1.52 Hz,与图3中晃车段的峰值频率接近,说明该IMF 分量能重现原始信号中的低频振动成分。
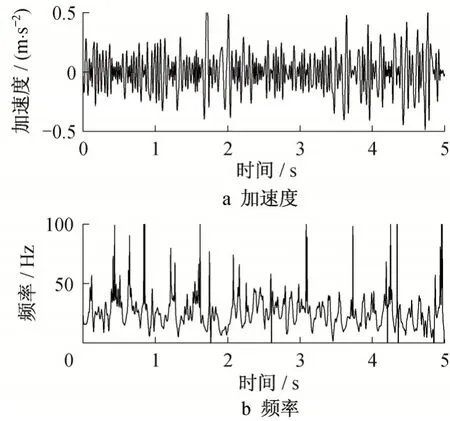
图6 非晃车段样本最大IMF分量及时频特性Fig.6 Maximum IMF component from non-swaying sample and its time-frequency characteristics
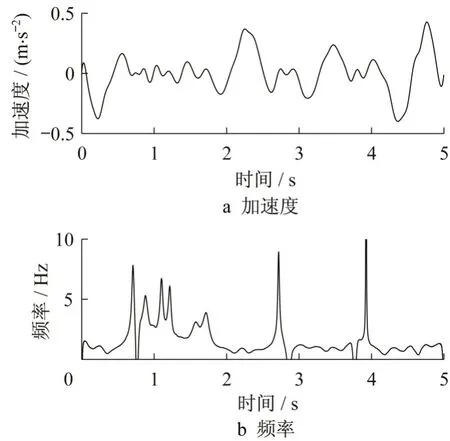
图7 晃车段样本最大IMF分量及时频特性Fig.7 Maximum IMF component from swaying sample and its time-frequency characteristics
与式(10)类似,定义谱能比η 来表征最大能量比分量中低频振动能量占该分量总能量的比例,即

式中:下标m 为最大IMF 分量的序号;Em为该分量的总能量;hm为该分量的边际谱;fs为5 Hz。
选取整个时域样本进行分段处理,各段均为1.25 s。图8 显示了整个时间历程谱能比的变化。在非晃车段,谱能比均较低,最大值为42.18%;在过渡段,谱能比陡升,从26.80%增长到87.30%;在晃车段,谱能比始终较高,最小值为68.37%。整个历程中,非晃车段和晃车段的谱能比波动很小,晃车段的谱能比分布水平始终居高并具有明显的连续性,过渡段存在大幅度的增长现象。处理过程中,各段样本连续且时长短至1.25 s,说明该方法满足在线检测的实时性要求。

图8 谱能比分布Fig.8 Distribution of spectral energy ratio
表2 显示了不同区段谱能比随时间的变化情况。非晃车段的谱能比均值只有25.46%,处于较低水平;晃车段的谱能比均值为81.85%,处于较高水平。非晃车段和晃车段的谱能比均值相差大约55%,说明了该方法满足在线检测的准确性要求。

表2 不同区段谱能比Tab.2 Spectral energy ratio of different segments
3 低频晃车主动惯容控制
3.1 惯容式动力吸振器原理
惯容式动力吸振器是利用惯容器反共振的特性来抑制振动。图9为两自由度并联式惯容器系统。
图9 中,c0、k0、c、k、b 和r 分别表示系统原阻尼、原弹簧刚度、惯容器的附加阻尼、附加弹簧刚度、惯容系数和补偿系数,z1和z2分别为两端的位移。由于附加惯容系统自身具备阻尼元件,可不考虑系统原阻尼,此时频响函数

图9 两自由度并联式惯容器系统Fig.9 Two-degree-of-freedom parallel inerter system

式中:m1和m2为两端的质量;ω 为圆频率。当ω0=时,系统发生反共振,物体振幅为零,据此确定参数k和b。
3.2 高速列车动力学模型及仿真
图10所示为带惯容器的轨道车辆横向动力学模型。

图10 高速列车横向动力学模型Fig.10 Lateral dynamic model of high-speed train
图10中,1处惯容器横移动力学方程为

式中:y、ψ和ρ分别表示横移、摇头和侧滚位移;下标b、t、isd分别表示车体、构架和惯容器;hsc表示车体和构架重心高度差。结合轨道车辆七自由度横向动力学模型[2],得到整个系统的矩阵方程,如下所示:

式中:轨道不平顺输入Yw=(yw1,yw2,yw3,yw4)T;系统各自由度响应Y =(yb,ψb,ρb,yt1,ψt1,yt2,ψt2,yisd1,yisd2)T;M、C 和K 分别表示质量、阻尼和刚度矩阵,由原模型矩阵[2]扩接形成;D表示不平顺输入的刚度矩阵。上述部分参数如表3所示。
据此,系统的频响函数矩阵

由此计算车辆各处的频响幅值。
图11为车体一位端距纵向中心线0.6 m处的频响函数幅频特性。被动悬挂的车体加速度频响在1.31 Hz频率处出现峰值,该值与前文所述的实测信号频谱中的峰值频率1.45 Hz 接近。当采取主动惯容式控制策略时,车体加速度频响的峰值明显降低,晃车频率处的频响幅值得到了明显抑制,约为被动悬挂时的1/7。

表3 部分参数Tab.3 Partial parameters

图11 频响函数幅频特性Fig.11 Amplitude-frequency characteristics of frequency response function
根据状态空间理论进行时域仿真,选取高速高激扰谱作为轨道不平顺输入,车辆运行速度设置为250 km·h-1。图12显示了不同控制策略下车体一位端的纵向中心线0.6 m处加速度响应。采取主动惯容式控制策略,车体加速度均方根值从0.41 m·s-2降低至0.19 m·s-2,降低了53%。

图12 车体加速度响应时域仿真Fig.12 Acceleration response of carbody from timedomain simulation
4 结论
(1)检测实测晃车信号时,利用经验模式分解和Hilbert 变换定义了谱能比,非晃车段和晃车段车体振动加速度的谱能比相差55%,对晃车的特定频段有着强分辨力,满足在线检测的实时性和准确性要求。
(2)与传统被动悬挂方案相比,主动惯容式车体控制策略显著降低了晃车特定频率处频响幅值,车体振动加速度的均方根值减少了53%。
