商用车电控气压制动压力变化率的影响因素研究
2020-04-10
(武汉理工大学 机电工程学院,湖北 武汉 430070)
引言
商用车电控气压制动系统是由压缩气体作为动力介质的气压制动部分和电子控制部分经“机电整合”而成,专用于保障客车和载货汽车等商用车行驶安全、稳定和平顺的核心装置。汽车主动安全和自动驾驶等技术的发展和应用,要求气压制动系统须在电控的基础上实现智能制动,通过对车辆行驶状态和道路环境的监测,主动导入适应的制动控制技术,驱动制动系统使车辆平稳减速或自动停车,保证车辆行驶过程的安全性、稳定性和平顺性。但是,气压制动系统工作时,由于供给压力波动及系统传输时延等影响,导致实际制动压力响应和预期制动压力响应之间存在压力偏差或时间偏差,压力偏差与时间偏差的比值即为制动压力变化率。通过控制制动压力变化率可以有效解决目前商用车气压制动系统存在的无法自主辨识车辆制动需求、实际制动压力响应和期望制动压力响应之间存在压力偏差和时间偏差,以及无法对车轮制动力实现有效的独立调节等问题。
现阶段电控气压制动系统的相关研究主要集中在数学建模、仿真分析和硬件在环实验等方面。户亚威[1]设计并搭建了电控气压制动系统实验台,结合半物理仿真平台,证明了所设计的电控气压制动系统试验台的可行性。制动气室是商用车气压制动系统中的重要执行部件,研究不同工况下制动气室的响应特性是必要的。周佳玮[2]基于制动气室的仿真模型,明确了不同气源压力下制动气室的响应特性,为车辆气压制动系统的改进提供了理论依据。目前关于车辆气压制动压力变化率的研究主要集中在乘用车液压制动系统领域。齐志权等[3]基于液压制动系统仿真模型,定量分析了制动系统阶梯减压控制周期和压差与轮缸压力变化率的关系。郜大伟等[4]基于流体力学理论,推导出了轮缸压力变化率模型,并开发了轮缸压力估计车载实验台。LIANG Chu等[5]建立了MATLAB与AMESim联合仿真平台,得到了ABS液压控制单元组件参数与制动压力变化率之间的关系曲线。
本研究面向商用车电控气压制动系统,研究制动压力变化率的影响因素。建立制动气室充气过程的数学模型,并利用响应面法,得到制动压力变化率的关键影响因素。基于制动气室充气过程的数学模型,仿真分析制动气室的供气压力、音速流导和初始压力对制动压力变化率的影响规律。通过制动压力变化率测量回路,实验验证改变供气压力和音速流导对制动压力变化率的影响规律。
1 商用车电控气压制动压力变化率的基本概念
对于传统车辆而言,可通过驾驶员干预,减小制动系统响应偏差,但对于辅助驾驶或自动驾驶环境下能够主动制动的智能制动系统而言,制动系统主动进行制动干预时,任何响应偏差均可能导致制动失效,进而引发事故。因此,面向未来自动驾驶商用车,气压制动系统必须在功能和性能上进行改进与提升,结构上由纯气压制动向电控气压制动转变,以提高系统的响应速度并改善其可控性;性能上则需要满足制动过程的安全、稳定和平顺,实现精准控制,从而减小制动过程的压力偏差和时间偏差,保障在驾驶员干预降低或无驾驶员干预的场景下,车辆仍然能够安全、平稳制动。
1.1 面向智能制动的电控气压制动回路
面向智能制动,为解决传统气压制动系统存在的响应时间滞后、压力波动以及压力响应精度低等问题,杨凡[6]提出了如图1所示的电控气压制动回路。

图1 面向智能制动的气压制动回路结构图
图1所示电控气压制动系统是在传统气压制动回路的基础上加入了自动调压阀(所谓自动调压阀,是指能通过电信号与气压信号相互转换,实时、自动地调节各制动气室的压力,同时满足自动制动调压需求的自动化调压阀),以实现制动压力的独立精确调节;用电子制动踏板代替机械式制动踏板,制动踏板通过线束与制动控制器相连;同时增加了电控单元、储气罐等。由于采用电信号的控制方式,且自动调压阀由储气罐直接供气,当制动信号产生后,可立刻控制自动调压阀向制动气室供气,缩短了压力响应时延;同时每个制动气室前均设置一个自动调压阀,可实现各制动气室压力的差异化供给,解决传统气压制动回路中压力响应时延较长、欠压导致制动力不足、制动压力响应不协调以及压力调节不精确等问题,更好地满足智能制动精确调压的需求。
1.2 商用车电控气压制动压力变化率的概念
GB 12676—2014《商用车辆和挂车制动系统技术要求及试验方法》中要求商用车具有行车制动系统和应急制动系统,行车制动系统应能控制车辆行驶,使其安全、迅速、有效停住,且制动作用应是渐进的[7]。为满足车辆行驶安全性、稳定性和平顺性的要求,同时保证制动作用是循序渐进的,本研究提出商用车气压制动压力变化率的概念。
气压制动系统工作时,由于供给压力波动及系统传输时延等影响,导致实际制动压力响应和预期制动压力响应之间存在压力偏差或时间偏差,这种偏差可分别称作为制动压力偏差和制动时间偏差。气压制动过程中制动压力-时间响应关系如图2所示。纵轴线上,在预定时刻(•所示),实际制动压力或大于(Δp1)、或小于(Δp2)预期制动压力,该偏差即为制动压力偏差;而横轴线上,达到预期制动压力所需制动时间或提前(Δt1)、或滞后(Δt2)于预期时刻,该偏差即为制动时间偏差。

图2 制动压力-时间响应关系图
对于自动驾驶车辆,制动压力偏差或制动时间偏差均可能导致制动失效,所以必须保证制动压力和制动时间均满足制动预期,故需同时考虑压力偏差和时间偏差。本研究采用单位时间制动压力的变化—制动压力变化率作为电控气压制动系统的评价指标和控制指标:
(1)
式中,p为制动气室的输出压力,MPa。
2 制动气室充气过程的数学模型
制动气室是气压制动系统的关键组成部分,压缩气体经过制动气室,将空气的压力能转化为执行机构的机械能,其结构图如图3所示。制动气室作为气压制动系统的末端执行元件,同时也是制动执行机构的始端元件,其响应特性的好坏直接关系到商用车电控气压制动系统的性能和车辆制动过程的稳定性和平顺性。在不影响制动气室压力特性和运动特性的前提下,本研究对制动回路进行简化,忽略管路部分的影响,即气源直接充气到制动气室。

1.气体入口 2.橡胶膜片 3.下盖 4.上盖5.活塞盘 6.回位弹簧 7.推杆图3 膜片制动气室的三维剖视图
为研究制动压力变化率的影响因素,本研究针对制动气室充气过程建立数学模型[8-9]。
2.1 流量方程
根据ISO 6358,由音速流导C和临界压力比b得到充气过程制动气室质量流量方程为:
式中,ρa—— 大气密度
p—— 供气压力
θa—— 环境温度
θ—— 制动气室内温度
ps—— 制动气室内压力
2.2 状态方程
制动气室充气过程中气体状态方程为:
(3)
(4)
(5)
(6)
(7)
式中,G—— 制动气室内质量流量
R —— 气体常数
V—— 制动气室体积
Cv—— 定积比热
hu—— 制动气室热交换系数
Sh—— 制动气室换热面积
A—— 制动气室的有效截面积
x0—— 活塞盘的初始位移
x—— 活塞盘的位移
D—— 膜片与卡箍接触的直径
d—— 膜片与活塞盘的接触直径
2.3 运动方程
制动气室的运动方程为:
(ps-pa)Ap-ma-kx-Fm=0
(8)

(9)

(10)
式中,Ap—— 活塞盘有效承压面积
m—— 活塞盘及推杆的总质量
a—— 推杆的运动加速度
k—— 弹簧弹性系数
Fm—— 活塞盘的膜片力
F0—— 膜片的初始变形力
s—— 推杆的行程
3 商用车电控气压制动压力变化率的影响因素分析
为实现电控气压制动系统精准的制动控制,研究制动压力变化率的影响因素。以某型气压制动气室为例,设定气压制动压力变化率计算仿真参数值如表1所示。

表1 气压制动压力变化率计算仿真参数
3.1 基于响应面法的制动压力变化率的关键影响因素分析
响应面法[10-11](Response Surface Methodology,RSM)是一种通过合理的方法设计试验方案,并通过试验或仿真获得一定的试验数据,采用多元二次回归方程来拟合因素与响应值之间的函数关系,是解决多变量问题的一种有效统计方法。其中,Box-Behnken Design(BBD)是响应面法中常用的试验设计方法之一,特点是试验设计简便,试验次数少,适用于2~5个因素的优化试验[12]。
本研究针对制动气室充气过程建立仿真模型,由仿真结果可知,供气压力、音速流导以及气室初始压力对制动压力变化率的响应特性均有影响,但不同参数的影响程度无法确定。因此,本研究确定参数范围,并采用稳态制动压力变化率作为目标值,得到参数范围设置表和仿真试验结果表,分别如表2和表3所示。

表2 参数范围设置表
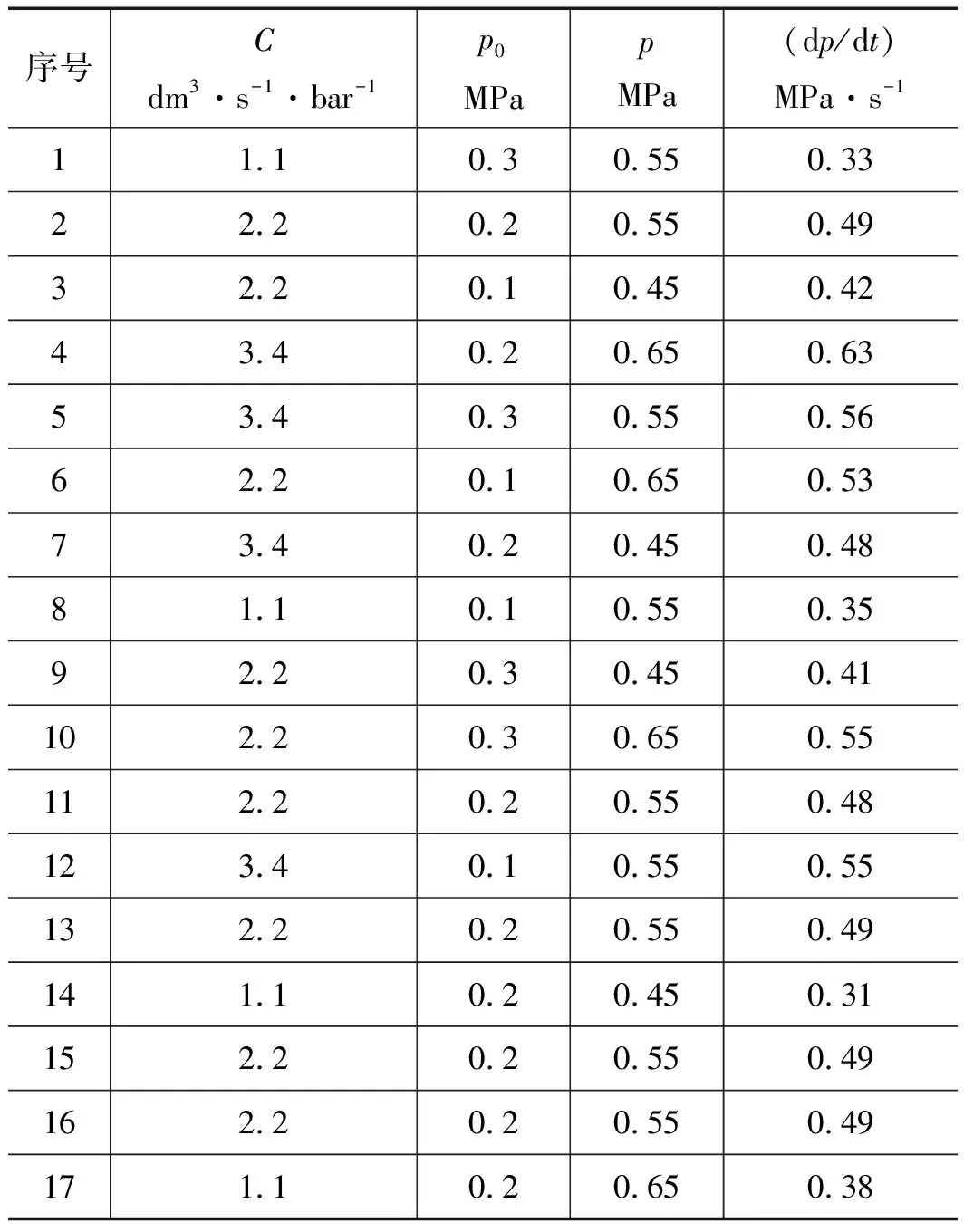
表3 仿真试验结果表
分析计算表3中的仿真试验数据,得到表4所示的影响因子方差分析表,通过比较F值和P值的大小来分析和判断不同影响因素对制动压力变化率的影响程度。当F值越大时,说明该因子的影响程度越大,反之,则越小;当P值越小时,则表示该因子影响程度越大,反之,则越小。试验设计过程中,响应因子采用的是稳态制动压力变化率dp/dt,主要是因为制动压力变化率的稳态值可以反映各因素对制动压力变化率的影响程度,而且在制动压力变化率响应曲线中比较容易观察。

表4 影响因子方差分析表
由方差分析表4可知,音速流导、供气压力和音速流导平方的P值均小于0.0001,P值越小,表明该因素影响越显著,所以音速流导、供气压力和音速流导的平方对制动压力变化率的影响程度较大,而制动气室初始压力对制动压力变化率的影响不显著。同时,由表4可知,音速流导、供气压力和音速流导平方的F值分别为2479.17、757.99和133.61,则影响因子显著程度为A>C>B,且音速流导和供气压力为关键影响因素。
3.2 制动压力变化率影响因素的影响规律分析
制动压力变化率的影响因素不仅包括结构参数,也包括工作参数。结构参数是指制动气室的结构设计参数,一般无法改变;工作参数是指可以修改并进行适当调整的参数。工程实际中,一般通过改变工作参数使响应结果达到预期目标。因此,本研究针对制动气室充气过程的数学模型,仿真分析制动气室的供气压力、音速流导和初始压力对制动压力变化率的影响规律。
1) 改变供气压力下的制动压力变化率
设定音速流导C=2.2 dm3/(s·bar)和气室初始压力p0=0.1 MPa不变,改变制动气室的供气压力,得到制动压力变化率仿真曲线如图4所示。
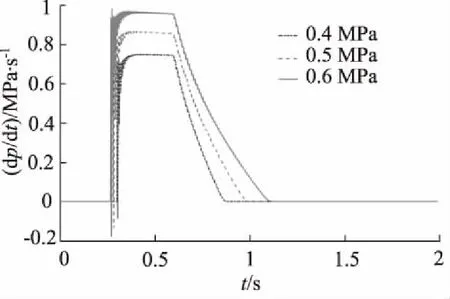
图4 改变供气压力的制动压力变化率仿真曲线
由图4可知,供气压力增加,制动压力变化率随之增大,且波动程度增大;随着供气压力增加,制动压力变化率的响应时间增长,即制动气室的充气时间增加。因此供气压力不仅影响制动压力变化率的大小,也影响制动压力变化率响应时间的长短。
2) 改变音速流导下的制动压力变化率
设定制动气室供气压力p=0.5 MPa和初始压力p0=0.1 MPa不变,改变音速流导,得到制动压力变化率仿真曲线如图5所示。
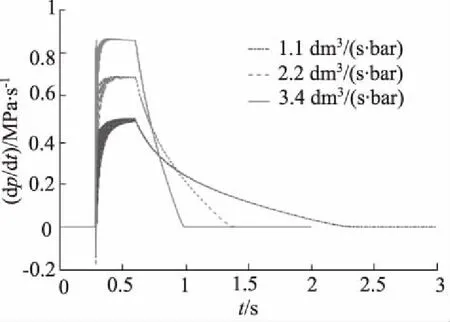
图5 改变音速流导的制动压力变化率仿真曲线
由图5可知,音速流导越大,制动压力变化率越大,波动程度逐渐减弱;音速流导越大,制动压力变化率响应时间越短。因此,音速流导改变对制动压力变化率的大小和响应时间均有影响。
3) 改变初始压力下的制动压力变化率
设定制动气室供气压力p=0.5 MPa和音速流导C=2.2 dm3/(s·bar)不变,改变制动气室内腔的初始压力,得到制动压力变化率仿真曲线如图6所示。
由图6可知,气室内腔初始压力对制动压力变化率的大小基本没有影响;初始压力越大,制动压力变化率的响应时间越短,主要原因是初始压力增加时,气室所需要外部提供的压力变小,则增加到目标压力的时间变短。因此,初始压力改变主要影响制动压力变化率响应时间的长短。

图6 改变初始压力的制动压力变化率仿真曲线
由仿真结果可知,当供气压力和音速流导改变时,对制动压力变化率响应时间和稳态值均有影响;而当初始压力改变时,仅对制动压力变化率的响应时间有影响,而对制动压力变化率的大小基本没有影响。由于仿真结果与响应面法分析结果中的关键影响参数基本保持一致,进而证明了响应面分析方法所得结论的合理性。
4 商用车电控气压制动压力变化率关键影响因素的实验验证
为验证供气压力和音速流导对制动压力变化率的影响规律,本研究设计制动压力变化率测量回路如图7所示,利用压力传感器8测量制动气室的压力,利用压力传感器9测量储气罐的压力值;将压力传感器采集到的数据经dSPACE传入计算机中,并通过Control Desk界面进行显示,实现数据的采集和保存。

1.气源 2.气动三联件 3.开关阀 4.精密调压阀 5.储气罐6.二位五通电磁阀 7.制动气室 8、9.压力传感器图7 制动压力变化率测量回路
在对制动气室压力进行数据处理时,由于测量方法、人为操作误差以及噪声等因素,导致制动压力变化率的曲线存在较多毛刺,不易观察其变化规律,为更好的观察和分析制动压力变化率曲线的变化规律,本研究对该曲线进行滤波处理。
4.1 改变供气压力下的制动压力变化率
设定音速流导C=2.2 dm3/(s·bar)和其他参数不变,改变气动回路的供气压力,得到滤波后的制动压力变化率实验曲线如图8所示。
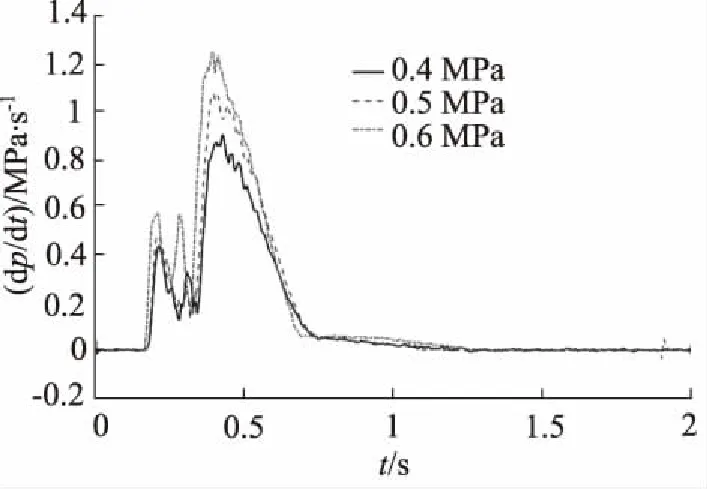
图8 不同供气压力的制动压力变化率实验曲线
由图4和图8可知,制动压力变化率的仿真和实验曲线变化规律一致。制动气室充气初期,制动气室制动压力变化率增加且波动程度较大;制动气室充气中期,随着制动气室活塞杆的伸出,制动压力变化率继续增加至最大值且在稳态值附近波动;制动气室充气末期,制动压力变化率逐渐下降,充气过程结束时,制动压力变化率下降至0。随着供气压力的增加,制动压力变化率越大,波动程度越明显;随着供气压力增大,制动气室制动压力变化率的响应时间基本保持一致。由实验曲线可知,供气压力对制动压力变化率的影响较大,而对响应时间的影响较小。由于实验过程中存在人为操作误差,导致制动压力变化率实验和仿真曲线存在偏差。
4.2 改变音速流导下的制动压力变化率
设定制动气室供气压力p=0.5 MPa和其他参数不变,通过改变气动回路中的音速流导值,得到滤波后的制动压力变化率实验曲线如图9所示。

图9 不同音速流导的制动压力变化率实验曲线
由图5和图9可知,制动气室充气初期、制动气室充气中期、制动气室充气末期至充气结束,制动压力变化率仿真结果与实验结果的变化规律基本保持一致。随着音速流导的增加,制动压力变化率增大,波动程度愈加显著;随着音速流导的增大,制动压力变化率的响应时间减小,且时间减小的十分明显。因此改变音速流导不仅影响制动压力变化率的大小,也影响制动压力变化率的响应时间。由于测量方法和人为操作误差等因素,导致实验曲线与仿真曲线存在偏差。
5 结论
本研究同时考虑制动压力偏差与制动时间偏差的制动压力变化率,并通过仿真分析和实验,得到制动压力变化率关键影响因素的影响规律。本研究的主要结论如下:
(1) 音速流导和供气压力对制动压力变化率的影响程度较大,而制动气室初始压力对制动压力变化率的影响不显著;
(2) 随着供气压力的增加,制动压力变化率越大,波动程度越明显。随着音速流导的增加,制动压力变化率增大,制动压力变化率的响应时间变小,波动程度愈加显著,改变音速流导不仅影响制动压力变化率的大小,也影响制动压力变化率的响应时间。