支承间距对十一柱塞航空液压泵转子系统临界转速的影响分析
2020-04-10郭长虹1王嘉维1白如霞1权凌霄23
郭长虹1 王嘉维1,白如霞1,权凌霄23
(1.燕山大学 机械工程学院,河北 秦皇岛 066004;2.燕山大学 河北省重型机械流体动力传输与控制实验室,河北 秦皇岛 066004;3.燕山大学 先进锻压成形技术与科学教育部重点实验室,河北 秦皇岛 066004)
引言
民机液压系统不断追求高压、高速、高功重比的目标,对航空泵性能提出更为严峻的要求[1]。我国航空柱塞泵生产技术落后,民机航空泵完全依赖于进口,购置及维修价格昂贵、供货周期长;我国仅有能力生产军用柱塞泵,且产品性能与国外存在较大差距[2],严重制约国内大飞机事业的发展。目前,国内外众多科研工作者,采用转子动力学理论分析复杂旋转机械的动力学特性,如航空发动机、离心泵、汽轮机等,并取得一定的研究成果[3],然而,鲜有学者采用转子动力学理论研究柱塞泵的动力学特性。因此,本研究拟抽取泵旋转部件构建其转子系统模型,采用转子动力学理论,研究泵转子系统临界转速机理及其影响因素,以提高泵临界转速。
近年来,国内外专家对转子系统临界转速分析及产生机理方面开展了很多研究工作,并取得显著的进展。邓旺群等[4-7]以发动机低压转子为研究对象,采用SAMCEF/ROTOR软件分析其临界转速机理,研究结果表明,转子临界转速随轴向支承间距的减小而增加,但是影响程度较小。转子系统第一阶和第二阶临界转速随着悬臂长度的增大而减小。宋雪萍等[8]经研究发现,系统临界转速与支承刚度成正相关。但是,当刚度为108N/m时,临界转速的变化很小。乔晓利等[9]认为轴承等效刚度参数的改变,对电主轴转子临界转速的影响较大,而等效阻尼参数与之相反。代彦宾等[10]研究得出,转子系统第一阶临界转速值与轴承预紧力成正相关,与轴承支承跨距成负相关。权凌霄[11]以斜盘式轴向柱塞泵-电机组转子系统为研究对象,分析转子系统临界转速及流量脉动及侧向径向压力引起的不平衡响应。XING Z等[12]精确计算高速电机转子临界转速,结果表明,改变轴承刚度和转子材料可以调节转子临界转速。CHIANG H等[13]以双转子系统为研究对象,研究发现转速比参数对于双转子系统设计极为重要。
1 泵转子系统集中质量模型建立
现抽取十一柱塞航空泵的旋转部件组成航空泵转子系统。根据离散等效原则,对航空泵传动轴、输入轴、旋转组件及轴承进行等效简化,构建航空泵转子系统的集中质量模型。
1.1 十一柱塞航空泵工作原理及结构分析
航空泵通常将电机轴和泵轴通过花键或减速齿轮直接相连,省去联轴器环节。十一柱塞航空泵三维模型如图1所示。
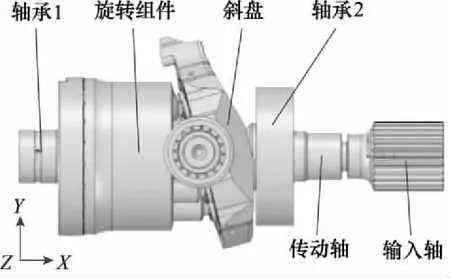
图1 十一柱塞航空泵三维模型
航空泵转子系统由输入轴、传动轴、旋转组件、轴承1及轴承2组成。不考虑轴承结构的影响,滚动轴承仅提供刚度,阻尼不计。航空泵各部件材料如表1所示。
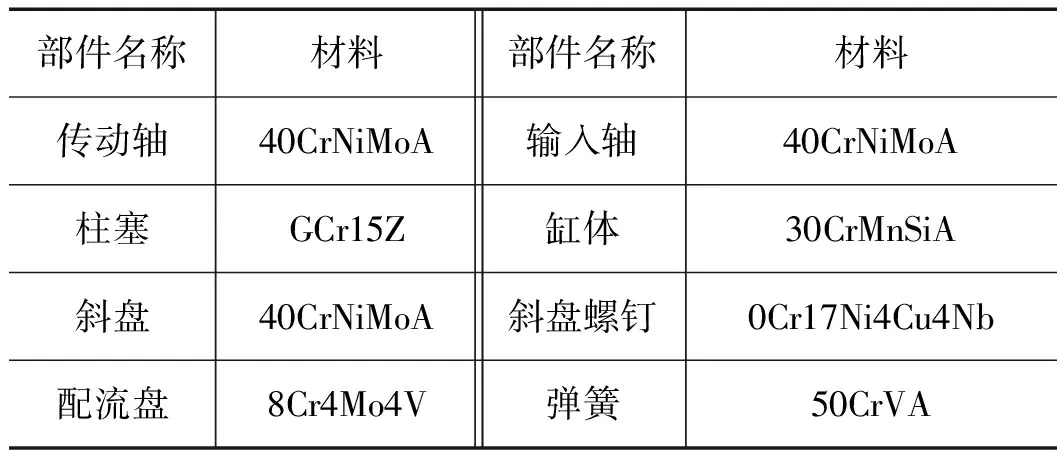
表1 航空泵各零件材料
1.2 航空泵转子系统集中质量模型
根据航空泵转子系统各部件的结构尺寸,建立其集中质量模型,首先应对转子进行结点划分。本研究重点研究斜盘倾角β为0时的转子系统简化模型。建模假设条件如下:
将旋转组件视为整体,等效为一个质心处的刚性薄圆盘;仅研究航空泵转子系统的横向弯曲振动;将泵传动轴和输入轴视为整体,不考虑传动、倒角的影响;支承中心位置不变,简化为等刚度的线性弹性支承。
航空泵传动轴离散的29个结点命名“1~29”,泵输入轴离散22个结点命名为“30~51”,旋转组件离散结点命名为“52”。根据各单元的长度等参数,将泵传动轴和输入轴视为整体,则整体集中质量模型如图2所示。

图2 航空泵转子系统整体集中质量模型
由图2可知,航空泵转子系统的整体集中质量模型由52个具有质量和转动惯量的结点、51段无质量弹性轴组成。此时,轴承1位于结点2处,轴承2位于结点21处,支承刚度取值为106N/m。
2 泵转子系统临界转速数值分析
在所建立的航空泵转子系统集中质量模型的基础上,采用两种传递矩阵法分析航空泵转子系统的临界转速。修正轴承1的轴向支承位置、轴承2的轴向支承位置参数,从数学模型角度分析轴向支承位置参数对航空泵转子系统临界转速的影响规律。
2.1 传递矩阵法分析转子系统临界转速
按照复杂转子系统的离散等效原则,建立实际转子系统集中质量模型。采用两种传递矩阵法分析航空泵转子系统临界转速,并对比两种分析方法的计算误差。
1) Prohl传递矩阵法分析临界转速
实际转子系统离散化后由N个单元组成,其集中质量模型如图3所示。第N个单元的长度lN=0。

图3 实际转子系统的集中质量模型
若转子系统最左端面为起始截面,其状态向量为Z1,则任意截面的状态变量Zi(i=2,3,…,N+1)可表示为:
Zi=Ti-1Zi-1=Ti-1Ti-2Zi-2=Ti-1Ti-2,…,T2T1Z1
=Ai-1Z1
初始截面的状态变量,即为转子系统的边界条件,表示为:
(1)
对于任意截面i(i=2,3,…,N+1),有:
(2)
对于末端截面N+1,有:
ZN+1=ANZ1
(3)
第N+1个单元左侧的边界条件为:
MN+1=0;QN+1=0
(4)
(5)
能使式(5)成立的ω值,即为转子系统的临界角速度。若式(5)有非零解,则应保证Δ(ω2)=0,即:
(6)
其中,Δ(ω2)称为剩余量。
临界转速为:
(7)
2) Riccati传递矩阵法分析临界转速
对于大型轴系系统而言,传统Prohl传递矩阵法的计算精度随着计算频率的提高而降低。在此方法的基础上,进一步提出Riccati传递矩阵法,以提高数值分析稳定性。首先将状态变量中的r个元素分为两组,即:
(8)
其中,f由状态变量中的r/2个零值组成,e由状态变量中的其余r/2个非零值组成。转子系统左侧端面的边界条件表示为M1=0,Q1=0,则:
(9)
对于相邻的两截面,其状态变量可表示为:
(10)
令Si为Riccati传递矩阵,是r/2阶方阵。引入Riccati变换fi=Siei,则:
(11)
整理式(11),得:
fi+1=(u11S+u12)i(u21S+u22)iei+1
(12)
又fi+1=Si+1ei+1,故:
(13)
对于起始截面,S1=0,由式(13)可得S2,S3,…,SN+1。对于末端截面,有:
fN+1=SN+1eN+1
(14)
式fN+1=SN+1eN+1=0有解的条件是|S|N+1=0。2.2 MATLAB求解转子系统临界转速
MATLAB编程求解临界转速流程图,如图4所示。
取2个角速度值,计算对应剩余量。若剩余量异号,则临界角速度存在于2个角速度值的区间内。确定临界角速度所在范围后,采用二分法即可不断逼近求出临界角速度,满足的值即为临界角速度。
1) Prohl传递矩阵法临界转速分析
采用Prohl传递矩阵法求解航空泵转子系统前两阶临界转速时,分别考虑有无剪切效应的影响;Prohl传递矩阵法剩余量曲线如图5和图6所示。
由剩余量曲线图可得,当考虑剪切效应系数的影响时,航空泵转子系统的前两阶临界转速值分别为10912.46 r/min和16493.98 r/min; 当不考虑剪切效应系数的影响时,航空泵转子系统的前两阶临界转速值分别为10919.2 r/min和16514.95 r/min。
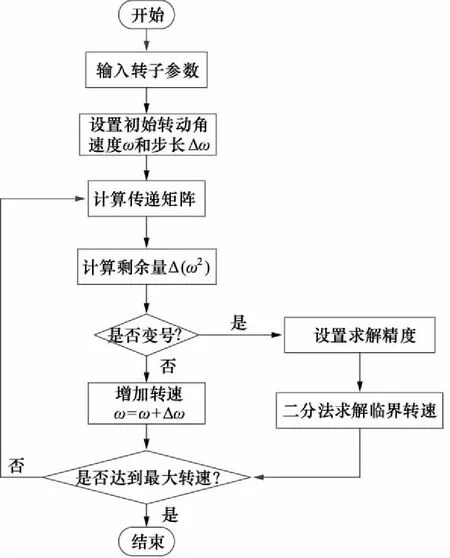
图4 MATLAB数值分析流程图
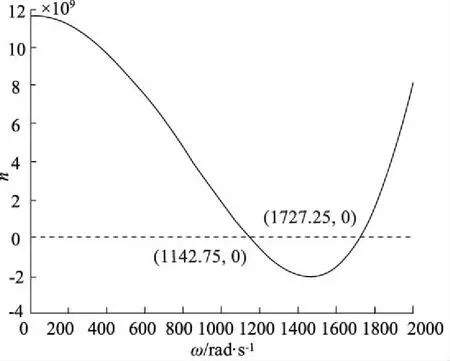
图5 考虑剪切效应系数

图6 不考虑剪切效应系数
2) Riccati传递矩阵法临界转速分析
采用Riccati传递矩阵法研究航空泵转子系统临界转速时,有无剪切效应影响剩余量曲线如图7和图8所示。

图7 考虑剪切效应系数
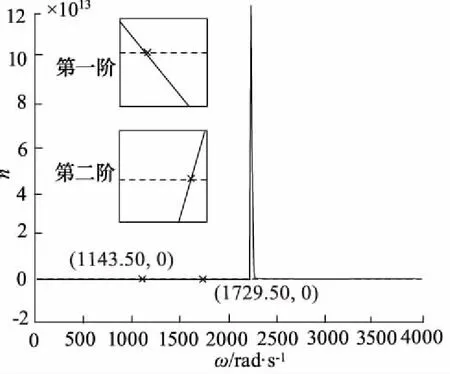
图8 不考虑剪切效应系数
当考虑剪切效应系数的影响时,航空泵转子系统的前两阶临界转速值分别为10910.07,16496.41 r/min;当不考虑剪切效应系数的影响时,航空泵转子系统的前两阶临界转速值分别为10919.62,16515.51 r/min。
2.3 轴向支承位置对系统临界转速的影响
初始时,轴承1位于结点2处的圆盘,轴承2位于结点21处的圆盘;本节分别将轴承1的轴向支承位置调整至结点1处和结点3处,将轴承2的轴向支承位置调整至结点25处。考虑剪切效应系数的影响,采用Prohl传递矩阵法求解航空泵转子系统的前两阶临界转速值,研究其变化趋势。
(1) 轴承2位置不变,轴承1位置前移9.1 mm至结点1处、后移9.1 mm至结点3处,此时剩余量曲线分别如图9和图10所示。
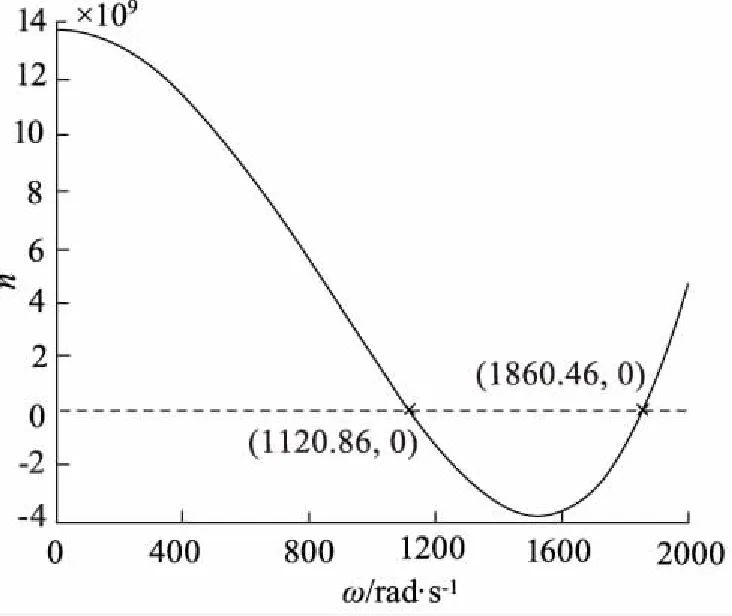
图9 前移9.1 mm
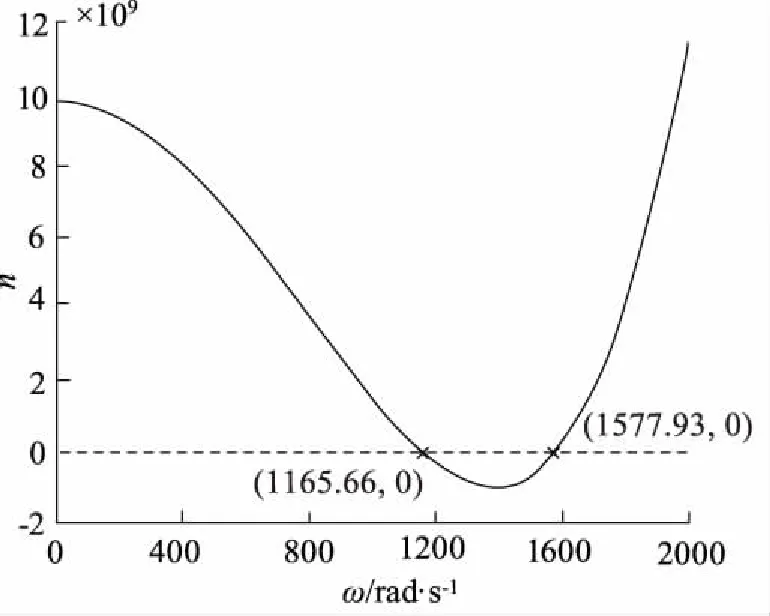
图10 后移9.1 mm
由图9和图10剩余量曲线可得,轴承1位置前移9.1 mm至结点1处、后移9.1 mm至结点3处,第一阶临界转速变化量分别为-209.08 r/min和+218.75 r/min;第二阶临界转速变化量分别为+1273.01 r/min和-1425.87 r/min。由分析可得,系统第一阶临界转速增加,第二阶临界转速降低,且该参数对第二阶临界转速的影响更为明显。
(2) 轴承1位置不变,轴承2位置后移11.7 mm至结点25处,此时剩余量曲线分别如图11所示。

图11 轴承2位置变化剩余量曲线
轴承2位置后移11.7 mm至结点25处,第一阶临界转速变化量为+297.94 r/min;第二阶临界转速变化量为+1302.35 r/min;当轴承1位置不变,轴承2轴向支承位置在一定范围内后移时,航空泵转子系统第一阶、第二阶临界转速均增加,且该参数对第二阶临界转速的影响程度更大。
轴承支承位置的改变将影响轴承支承跨距。轴承1后移时,两轴承支承跨距减小,第一阶临界转速增加,轴承2后移时,两轴承支承跨距增加,但第一阶临界转速同样会增加,因为轴承2后移时,对应的转子右侧悬臂端长度减小,此时悬臂端长度成为影响临界转速的关键因素之一。
3 转子系统临界转速验证实验
在“MFS-RDS机械故障诊断和转子动力学模拟实验平台”上完成临界转速验证实验。针对实验转子系统模型,按照本研究提出的离散等效原则,建立其集中质量模型,数学模型分析与实验相互验证,以证明本研究转子系统集中质量模型建立及求解的正确性。此外,在简易转子实验台上完成支承轴承位置对临界转速影响规律的验证。
3.1 MFS-RDS实验平台介绍
MFS-RDS实验平台可用于研究转子动力学特性、旋转机械故障诊断等,可完成转子系统临界转速实验,如图12所示。

图12 MFS-RDS实验平台
3.2 转子系统临界转速测试及分析
由图12可知,利用卡环将圆盘安装于转轴上,转轴两端安装轴承,3个加速度传感器分别位于轴承座3个方向。对加速度测试数据进行FFT频谱分析,转子系统瀑布图如图13所示。
可以看出,通过测试转子系统振动,获得系统的一阶固有频率54.41 Hz,对应第一阶临界角速度341.87 rad/s,第一阶临界转速3264.60 r/min。
3.3 传递矩阵法求解实验转子系统临界转速
将MFS-RDS转子系统按所述方法进行离散等效,建立其集中质量模型。分别采用Prohl传递矩阵法和Riccati传递矩阵法分析转子系统临界转速,剩余量曲线如图14和图15所示。
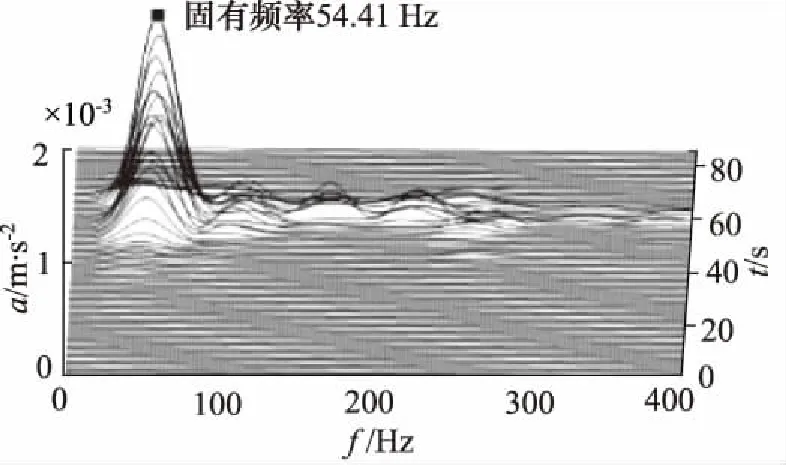
图13 转子系统瀑布图
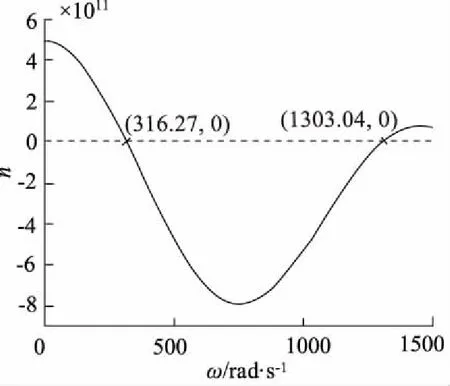
图14 Prohl传递矩阵法剩余量曲线图
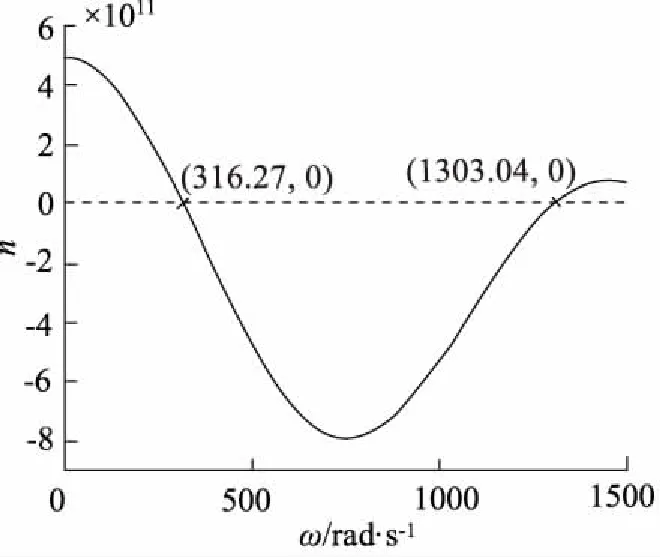
图15 Riccati传递矩阵法剩余量曲线图
采用数学模型及实验测试两种方法分析实验转子系统临界转速,如表2所示。

表2 实验转子系统临界转速对比
由表2可知,采用数学模型和实验测试两种方法所求解的第一阶临界转速误差为7.5%左右。结果表明实验结果与数学模型分析结果具有一致性,验证了本研究集中质量模型建立及求解方法的准确性。
3.4 轴承轴向支承位置对临界转速的影响
为验证轴承轴向支承位置对干转子系统临界转速的影响,现搭建简易转子系统实验台,该实验台由电机、转轴、圆盘、轴承、联轴器等组成,如图16所示。

图16 简易转子系统实验台
本研究主要关注各参数对干转子系统临界转速的影响。现保持圆盘及轴承1的所处位置不变,调整轴承2的轴向支承位置,使两轴承间距分别为700,600,500 mm,进行临界转速测试。
对加速度实测数据进行降噪处理,对降噪后的测试数据进行FFT频谱分析,转子系统瀑布图如图17~图19所示。

图17 转子系统瀑布图(轴承间距700 mm)
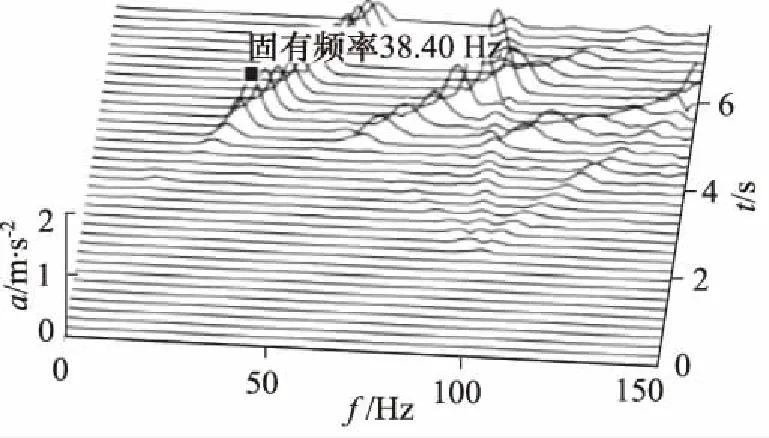
图18 转子系统瀑布图(轴承间距600 mm)
当轴承的轴向支承位置发生改变时,两轴承间距随之改变。由图17~图19知,当轴承间距减小时,实验转子系统的第一阶临界转速增加。
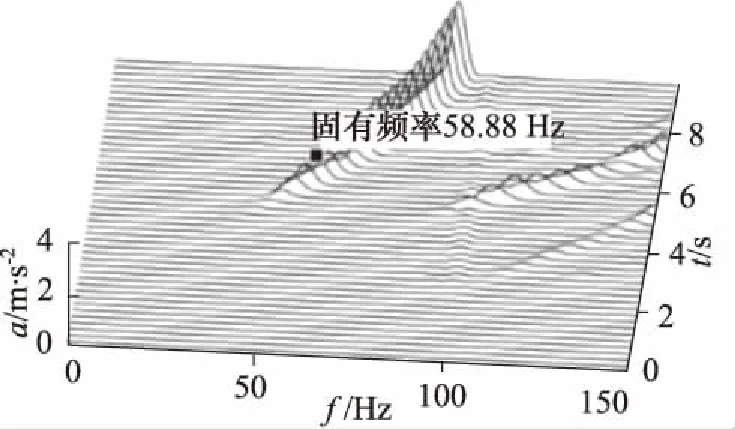
图19 转子系统瀑布图(轴承间距500 mm)
4 结论
本研究依据离散等效原则建立航空泵转子系统集中质量模型,采用传递矩阵法分析其临界转速;通过修正轴向支承位置等参数,得到以下结论:
(1) 分别采用Prohl传递矩阵和Riccati传递矩阵分析航空泵转子系统临界转速,分析结果基本一致;
(2) 分别改变轴承1和轴承2的轴向支承位置,结果表明,轴承1轴向支承位置后移时,航空泵转子系统第一阶临界转速增加。轴承2轴向支承位置在一定范围内后移时,转子系统第一阶临界转速均增加,且轴向支承位置参数对第二阶临界转速的影响程度更大;
(3) 建立实验台转子系统集中质量模型,实验测得临界转速值与数学模型求解临界转速值误差在7.5%左右,验证了数学模型建立的准确性;在简易转子实验台上完成轴向支承位置对转子系统临界转速的影响验证,研究表明,支承间距减小,转子系统第一阶临界转速增加。