双框架控制力矩陀螺框架系统的扰动观测及抑制
2020-04-08李海涛
李海涛,宋 鹏,侯 林
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
1 引 言
双框架磁悬浮控制力矩陀螺(Double Gimbals Magnetically Suspended Control Moment Gyroscope, DGMSCMG) 具有输出力矩大、精度高、能输出两个自由度的陀螺力矩等优点,因此对空间站和卫星姿态控制系统非常有吸引力[1]。DGMSCMG主要由磁悬浮高速转子系统和框架系统组成,它的输出力矩可以表示为M=H×ω,其中H是高速转子角动量,ω为框架系统角速度,M是输出陀螺力矩[2]。可以看出在高速转子角动量H恒定时,框架系统的角速度ω直接影响陀螺输出转矩M的精度[3]。此外,由于输出陀螺转矩的精度影响航天器的稳定性和姿态控制精度,因此实现框架系统的高精度角速度跟踪控制至关重要。
框架系统是一个超低速的机械伺服系统,内外框架产生的非线性耦合力矩[4]、非线性的摩擦力矩[5]和未建模动态[6]是影响框架系统角速率精度的主要因素。近年来,各种控制方法已被用于处理DGMSCMG框架系统中的干扰问题。文献[6]设计了状态反馈线性化控制器来解决高速转子与框架系统之间的耦合转矩问题,通过在自适应滑模控制器中引入反馈补偿,对线性化后的耦合力矩进行抑制。考虑到框架系统与陀螺房中高速转子之间的耦合力矩以及外部干扰问题,文献[7]提出了一种自适应逆控制方法来抑制扰动,提高了系统性能。上述方法通过引入反馈补偿来抑制干扰。然而,大多数干扰不能用传感器来测量,这使得干扰估计成为一种广泛使用的方法。在过去的几十年里,由韩京清教授提出的扩张状态观测器(Extend State Observer, ESO)得到了充分的发展[7-9]。在ESO理论中,将系统内部动态和外部干扰认为是“集总干扰”,进而扩展为系统的新状态[10],对于m阶系统,需要建立m+1阶ESO,配置m+1个参数[11]。通过ESO对集总扰动进行估计,同时结合合适的控制方法如滑模控制和H控制等传统的鲁棒反馈控制方法,可以补偿和消除干扰。作为一种自抗扰控制方法,基于ESO的控制方法已经广泛应用于电机[12]、MEMS系统[13]等工程实践中[14]。
文献[15]提出了一种基于三阶ESO振动抑制的控制方法来解决DGMSCMG框架系统中存在较低频率谐振点的问题。然而,限制ESO应用的一个因素是,如果系统状态方程的阶数大于2,则很难在实际应用中配置满足系统精度要求的ESO参数[16],而针对高阶系统ESO参数配置方法仍在讨论中。在文献[16]中,张荣等人提出了级联ESO(Cascade Extended State Observer, CESO)的概念。文献[17]提出了一种基于状态反馈和CESO的复合控制器,以提高框架角速度的精度,该控制器性能稳定,但所使用的是线性CESO,不能在小参数配置下快速跟踪系统的状态和干扰。
本文研究了基于非线性级联扩张状态观测器(Nonlinear Cascade Extended State Observer,NCESO)和滑模控制的复合控制器,以抑制DGMSCMG框架角速率伺服控制系统中存在干扰的问题。该方法主要有两个显著特点。首先,使用NCESO对集总干扰进行估计,既解决了传统ESO阶数较高时参数难以配置的问题,同时也提高了线性CESO的估计精度。其次,通过结合滑模控制器可以有效抑制框架系统的干扰,而滑模控制器的开关增益只需要设计的比干扰估计误差的界限大而不是比干扰大,就可以缓解抖振问题。通过仿真和实验验证了所提方法对框架系统进行干扰抑制的有效性。
2 DGMSCMG框架伺服系统的数学建模及干扰分析
(1)
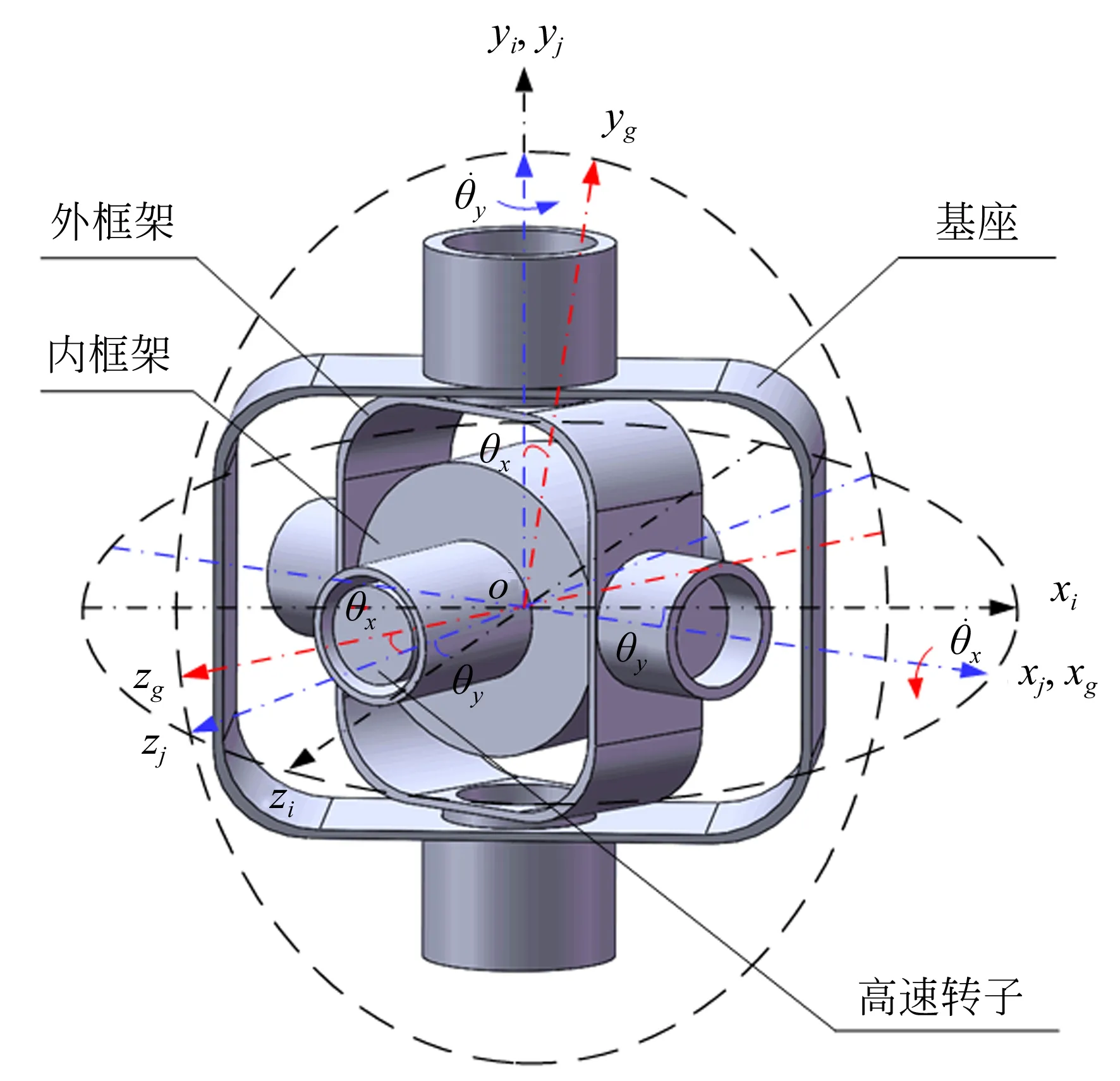
图1 DGMSCMG坐标定义Fig.1 Coordinate definition of DGMSCMG

(2)
其中:ux和uy是框架力矩电机的控制电压,Rx和Ry是力矩电机的定子电阻,Lx和Ly是电感,Cex和Cey是反电动势系数。

(3)



(4)

在实际系统中,框架角速度是有界可微的,因此总干扰f是有界的。
3 基于NCESO的复合控制器设计及系统稳定性分析
3.1 传统非线性ESO设计
根据文献[9]可构建如下传统非线性ESO:
(5)

(6)

从式(5)和式(6)可知,如果使用传统的非线性ESO,需要配置4个参数,但在实际工程应用中配置4个参数来满足优良的系统性能是很困难的,且非线性ESO的稳定性很难证明。相比之下,二阶ESO的理论、参数配置方法以及稳定性证明相对成熟[20]。文献[16]提出二阶ESO级联的概念,能充分使用二阶ESO的理论和参数配置方法。级联ESO将具有相同参数的3个相似二阶ESO级联取代以上4阶ESO,从而将ESO中4个参数的调整简化为两个参数的调整。
3.2 基于NCESO和滑模控制的复合控制器设计
根据文献[16],三阶系统需要构建由3个二阶ESO组成的级联ESO。将非线性CESO的状态变量定义为z=[z1,z2,z3,z4,z5,z6]T,其中z1,z2,z4,z6分别用于估计v1,v2,v3,f。z3和z5是中间变量。NCESO的状态方程描述如下:
(7)
其中:β1和β2是NCESO的参数;ei(i= 1,…,6)为估计误差,定义为e1=z1-v1,e2=z2-v2,e3=z3-z2,e4=z4-v3,e5=z5-z4,e6=z6-f。
NCESO的非线性误差函数如下:
(8)
其中i=1,3,5。NCESO的结构如图2所示。

图2 NCESO结构简图Fig.2 Structure diagram of NCESO
从式(7)中减去式(4),得到误差方程如下:
(9)
(10)
其中θref,ωref分别是参考角位置和参考角速度,c1,c2是增益系数,满足c1>0,c2>0。
滑模控制律设计为:
ux=-bx-1{ksgn(s)+c1(z2-ωref)+
(11)
其中k是转换增益。
综上,基于NCESO和滑模控制的DGMSCMG框架系统控制结构图如图3所示。

图3 框架系统控制结构图Fig.3 Control block diagram of gimbal system
3.3 框架系统稳定性分析
滑模面s的导数为:
(12)
选取李雅普诺夫函数为:
(13)
其导数为:
(14)

4 仿真和实验结果
4.1 仿真和实验设置
为了验证本文提出方法的有效性和优越性,将它与文献[17]中使用的基于LCESO的复合控制方法进行了对比。本研究的平台是一个DGMSCMG系统,如图4所示,框架电机参数如表1所示。

图4 DGMSCMG实验系统Fig.4 Experimental system of DGMSCMG
表1 框架电机参数
Tab.1 Design parameters of gimbal motor

参数参考值内框架等效转动惯量Jx/(kg·m-2)0.141外框架等效转动惯量Jy/(kg·m-2)0.173内框架反电动势系数Cex/(V·rad-1·s-1)1.2外框架反电动势系数Cey/(V·rad-1·s-1)1.22内框架扭矩系数Kx/(N·m·A-1)1.73外框架扭矩系数Ky/(N·m·A-1)2.22内框架电机定子电阻Rx/Ω5外框架电机定子电阻Ry/Ω6内框架电机定子电感Lx/mh7.5外框架电机定子电感Ly/mh9转子轴向转动惯量Hz/(N·m·s)1.22
从式(7)和式(11)可以看出,系统中有5个参数需要设计,即NCESO的参数β1,β2和控制器参数c1,c2,k。控制器参数和观测器参数分别与控制器带宽ωc和观测器带宽ω0有关,可以参照文献[21]进行配置。其中,控制器带宽ωc与框架角速度带宽有关,观测器带宽ω0应该满足ω0=(2~5)ωc。参数设置如表2所示。

表2 控制器和观测器参数
将内外框架设置为初始正交且静止,在这种情况下耦合力矩达到最大。此外,在仿真中使用Stribeck摩擦模型(工程中最常用的摩擦模型之一)来模拟框架系统中非线性摩擦的影响。
4.2 干扰估计和抑制性能仿真
分别在t=1 s和t=3 s时给内外框架5(°)/s的阶跃信号,在NCESO和LCESO两种方法下,内框架系统的速度状态x2和集总干扰f及其估计值、估计误差的对比仿真分别如图5和图6所示。
图5表明,使用两种方法都可以准确地估计出速度状态x2,而本文提出的方法估计精度更高,估计误差降低了一个数量级。

图5 速度状态估计效果对比Fig.5 Comparison of speed estimation effects
图6表明使用两种方法都可以准确地估计出“集总干扰”f。此外,可以看出NCESO的稳态观测误差被限制在一个非常小的值上,这已经在式(9)中解释了。内外框架的阶跃角速度响应曲线的对比仿真如图7所示。

图6 干扰估计效果对比Fig.6 Comparison of disturbances estimation effects
从图7中可以看出,当给定参考信号时,外框架和内框架分别在t=1 s和t=3 s时受到耦合力矩和非线性摩擦力矩的影响。在t=3 s时,由于耦合力矩的作用,内框架角速度有一定的波动,LCESO方法下角速度从5 (°)/s波动到4.88 (°)/s,而在NCESO方法下角速率从5 (°)/s仅波动到4.95(°)/s,波动幅度从0.22 (°)/s降低到0.05 (°)/s。同理,在t=1 s时,与LCESO方法相比,采用本文提出的方法时外框架的角速度波动从0.4 (°)/s降低到0.04 (°)/s。而且,阶跃响应的超调量减小,调节时间也缩短。内外框架的角速度波动较小表明NCESO具有更好的抗干扰能力,这也从系统输出上验证了图5和图6中NCESO对速度状态以及干扰的估计性能。
为了进一步在时域方面验证NCESO的有效性,在t=0 s时给外框架幅值为5(°)/s,频率为3 Hz的正弦参考角速度信号,内框架为零速率锁定状态。外框架系统在NCESO和LCESO方法下的干扰估计波形如图8所示。

图8 外框架系统的观测器干扰估计对比Fig.8 Comparison of disturbances estimates for observer of outer gimbal
从图8中可以看出,当外框架被给定上述正弦参考角速度信号而内框架被零速率锁定时,外框架受到正弦周期性扰动的影响,两种方法下z6都可以很好地估计正弦周期集总干扰f,稳态估计误差不超过2%,其中NCESO的稳态估计误差更小。外框架在图8所示的正弦周期扰动作用下的正弦角速度跟踪曲线如图9所示。从图9中可以看出,采用LCESO方法时外框架的速度跟踪性能较差,跟踪误差为1.05 (°)/s,相位滞后为6°,而使用NCESO方法时外框架具有较好的追踪性能,速度跟踪误差为0.2 (°)/s,相移为1.1°。
在控制器设计中,为了补偿干扰的影响,在控制器中增加了集总干扰的估计值。为了进一步研究干扰补偿后残余干扰对框架系统输出角速度的影响,以内框架在2 s内的锁定状态(即参考角速度为0 (°)/ s)为例来分析其角速度波动。图10为两种方法下内框架输出角速度波动的对比仿真结果。

图9 外框架正弦追踪曲线Fig.9 Sinusoidal tracking curves of outer gimbal

图10 内框架角速率波动对比Fig.10 Comparison of angular speed fluctuations of inner gimbal
从图10可以看出,使用本文提出的方法,在控制器中补偿了扰动影响后,作用在内框架输出角速率上的残余扰动相当小,速度波动小于0.05 (°)/s,与采用LCESO方法时速度波动为0.25 (°)/s相比,干扰对框架系统输出角速率的影响受到显著抑制。
为了证明本文提出的控制方法针对不匹配不确定性扰动,在内框架零速率锁定的情况下,分别给定外框架参考正弦和参考阶跃速度信号,此时外框架电机控制力矩和滑模面波形如图11所示。从图11可以看出,当我们给定的滑模控制器增益大于干扰估计误差的界限时,滑模面随着控制力矩的变化不断调整,使得滑模控制器的输出对系统的不匹配不确定性干扰进行有效抑制。此时,在系统稳定的情况下,滑模控制器增益相对不算太大,从而缓解了抖振的影响。

图11 不同参考输入下控制力矩和滑模面波形Fig.11 Torque and sliding surface waveforms with different reference inputs
4.3 干扰抑制及动态性能实验
4.3.1 干扰抑制
分别在t=1 s和t=3 s时给内外框架5 (°)/s的阶跃信号,两种复合控制方法下的实验效果如图12所示。

图12 阶跃信号下框架干扰抑制性能Fig.12 Disturbances suppression performance of gimbal system under step response curves
从图12可以看出,与LCESO相比,NCESO对于系统的干扰具有更好的抑制效果,内框架角速度波动从0.5 (°)/s减小到0.2 (°)/s,外框架角速度波动从0.45 (°)/s减小到0.15 (°)/s。该实验结果与仿真图7相互印证,进一步说明本文提出方法具有良好的干扰抑制性能。
4.3.2 动态性能
框架系统是一个变速伺服系统,速度的动态跟踪性能直接影响DGMSCMG的输出力矩精度。为了验证本文提出的控制方法的动态响应能力,在t=0 s时给外框架幅值为5 (°)/s,频率为1 Hz的正弦参考角速度信号,之后参考信号变为幅值为5 (°)/s,频率为3 Hz的正弦信号,框架角速度的跟踪性能如图13所示。

图13 正弦信号下框架动态响应性能Fig.13 Dynamic response performance of gimbal system under sinusoidal response curves
从图13可以看出,两种控制方法下,速度误差和相位延迟都随着给定参考信号频率的增加而增加。与LCESO相比,基于NCESO的复合控制方法具有更好的角速度跟踪性能。使用LCESO方法时速度最大跟踪误差为1.8 (°)/s,相移为8°,而复合控制方法的速度最大跟踪误差为1.2(°)/s,相移为1.3°。该实验结果与仿真图9相互印证,进一步说明本文提出方法具有良好的动态跟踪性能。
上述实验结果与仿真结果契合,进一步证明了本文提出的基于NCESO和滑模控制的复合控制方法的有效性和优越性。
5 结 论
本文提出了一种基于NCESO和滑模控制的复合控制方法来解决DGMSCMG框架系统中存在的不匹配干扰问题。针对系统状态方程不满足传统CESO积分链形式的问题,引入坐标变换。本文将所有干扰都认为是集总干扰并由设计的NCESO估计,提高了状态观测器的估计精度。通过滑模控制器,可以从系统的输出通道中消除集总干扰的影响,而滑模控制器中的开关增益只需比干扰估计误差的界限大,就可以缓解抖振问题。最后,将本文提出的控制方法与LCESO和状态反馈结合的复合控制器进行了对比仿真和实验。仿真和实验结果表明,本文提出的方法具有更好的干扰抑制性能和动态响应性能,内框架角速度波动从0.5 (°)/s减小到0.2 (°)/s,外框架角速度波动从0.45 (°)/s减小到0.15 (°)/s;跟踪正弦参考信号时,速度跟踪误差从1.8 (°)/s减小到1.2 (°)/s,相位滞后从8°减小到1.3°。由于在工程应用中广泛存在着内部未建模动态、参数摄动以及外部干扰等多种不确定干扰,因此该方法可应用于其他实际工程中。
