含关节间隙的并联机器人运动误差分析
2020-04-08张旭祥沈丹峰刘夏轩德张国英
张旭祥,沈丹峰,刘夏轩德,张国英
(西安工程大学 机电工程学院,陕西 西安 710048)
0 引 言
冗余驱动并联机器人具有结构紧凑、精度高和承载能力强等优点,可以很好的改善机构特性,提高机构运行精度[1-2]。在并联机构中,由于制造装配误差及磨损等原因,会导致运动副产生间隙,降低机构运动精度[3-4]。目前国内外学者在有转动关节间隙的机械系统分析过程中,主要有3种建模方法[5]。其中,弹簧阻尼法是用弹簧伸缩表示运动副元件的挤压变形,弹簧阻尼法更加接近现实[6-7]。对不同运动状态进行模拟,有学者基于改进弹性基础模型,建立了一种新的旋转铰间隙非线性混合碰撞力模型[8],并与传统的L-N非线性弹簧阻尼碰撞力模型[9]进行了比较,得出其优越性[10-11]。Parenti Castelli等[12]采用虚功原理对空间机构关节间隙进行分析,提出一种更加灵活和完整的方法用来分析间隙在静态和动态条件下的影响。Khemili[13]运用Adams对柔性构件曲柄滑块机构进行仿真测试,得出间隙关节柔性是影响机构性能的关键因素。随着对机器人运动精度的要求不断提高,以上对机构误差的分析,对提高机器人轨迹规划与路径规划的精度研究提供一定参考[14-16]。因此,对于含关节间隙机构的误差分析是提高机构动态精度的有效方法。
本文以平面冗余并联机器人为研究对象,忽略机构杆长误差的影响[17-18],引入弹簧阻尼法理论基础建立含关节间隙的运动模型。基于独立支链系统进行含转动副关节间隙的运动误差分析,采用Adams仿真分析与数值理论计算相结合的方法,得出含关节误差对机构运动参数的影响。
1 并联机构含关节间隙模型
平面冗余二自由度并联机器人机构简图如图1(a)所示,图1(b)为该并联机器人的虚拟样机模型。

(a) 机构简图
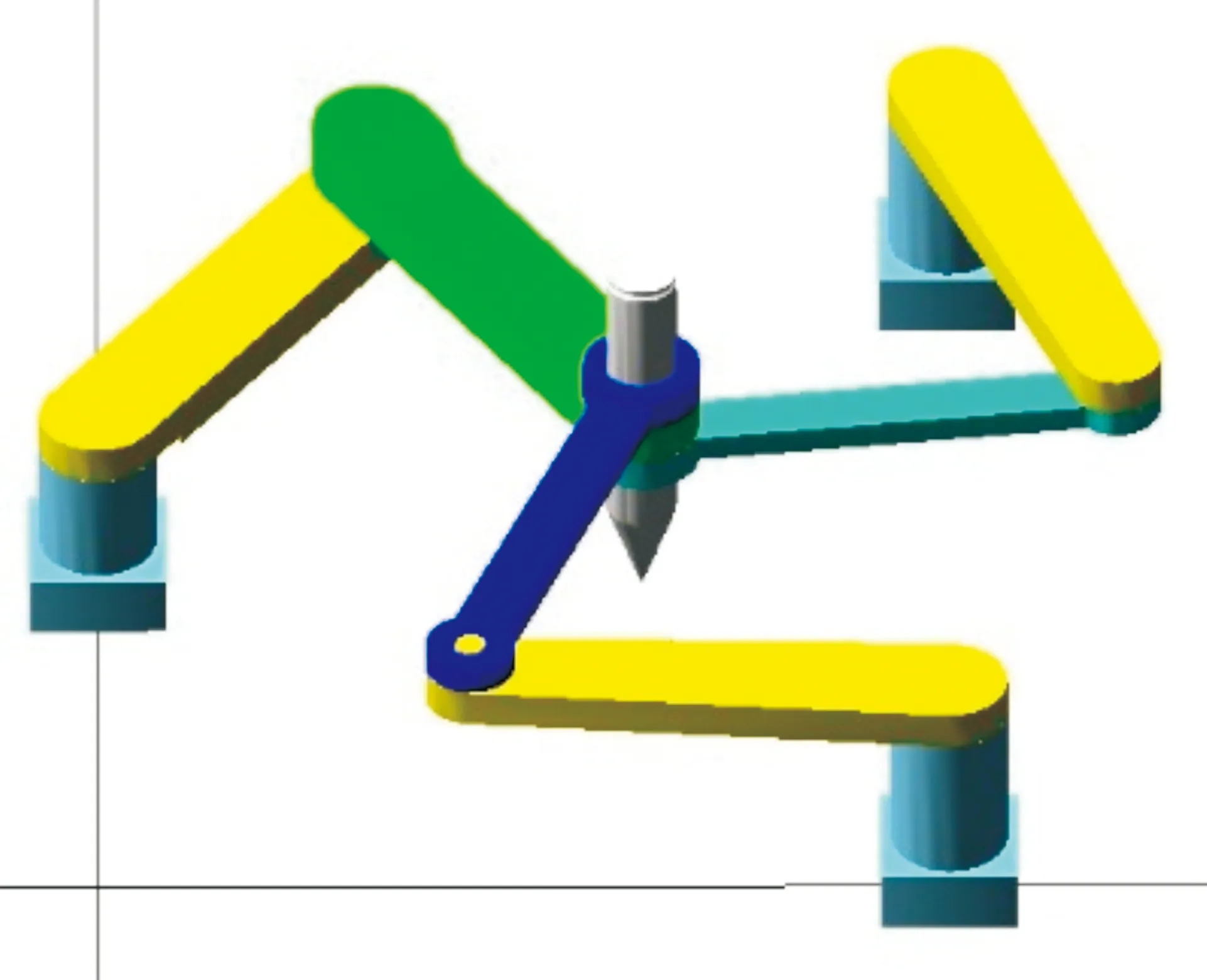
(b) 虚拟样机模型图 1 二自由度并联机器人机构Fig.1 2-DOF parallel robot mechanism
图1(a)中,并联机构主动关节点为A1(0,250),A2(433,0),A3(433,500),Bi(xi,yi)(i=1,2,3)为从动关节点,P(x0,y0)是其末端执行点。连杆Li1(i=1,2,3)是主动杆,连杆Li2(i=1,2,3)是从动杆,且Li1=Li2=l=244 mm。定义关节角θi1(i=1,2,3)是对应主动杆与x轴正向夹角,关节角θi2(i=1,2,3)是对应从动杆与x轴正向夹角,逆时针为正。
并联机构具有空间对称性,其所含独立支链系统等效于平面串联二连杆机构,本文选择冗余并联机构顺时针位形中的任意两支链为研究对象,选取其中一独立支链建立其模型,如图2(a)所示。要得出转动副间隙误差对机构主要运动参数的影响,则需建立含转动副间隙的数学模型。图2(b)是含间隙的关节转动副示意图。设Δei1(i=1,2)是主动杆AiBi与从动杆BiP连接点处转动关节的误差值(即该处的偏移量);Δei2(i=1,2)是从动杆BiP与并联机构连接末端点P处转动关节的误差值;Δpi是i支链在含有间隙误差Δei1与Δei2时末端点P的轨迹曲线偏移量。间隙误差Δei1与Δei2是任意的,为了分析不同的转动副间隙对末端点P的位置影响,本文选取Δei1与Δei2分别为0 mm,0.5 mm,1 mm,1.5 mm,2 mm,依次讨论在含不同关节间隙的误差时,Δei1与Δei2的实际变化值对末端点P的轨迹曲线影响。
2 含关节间隙独立支链系统运动分析
独立支链AiBiP正运动学求解,即已知电机的角度位置θi1,求并联机构连杆末端P(x0,y0)所在位置。依据图2(a),由几何关系得
(1)
式中:θi1+Δθie(i=1,2)为i支链在含Δei1与Δei2情况下的角度。

(a) 独立支链简图

(b) 转动副间隙图图 2 支链简图及转动副间隙图Fig.2 Diagram of branching and rotating pair clearance
由图1(a)所示,根据平面并联机构的特殊性,P(x0,y0)为3支链共同执行点,由此约束得
(2)
令 [MNQ]T=
由式(1),(2)可得并联机构运动学正解,即末端执行点P(x0,y0)位置坐标为
(3)
由式(3)可知,并联机器人正向运动学中,末端位置P(x0,y0)仅为其主动关节角θi1的函数。
结果显示,干预1学年后,儿童进行休闲性体力活动时间明显增加(469.31±345.89 min vs 563.10±345.88 min,P=0.005)。体力活动水平不足(<180 min/周)的比例明显下降(P=0.003)。尤其是每周体力活动时间≥300min的比例明显增加(P=0.029)。见表2。但干预前后屏幕时间差异无显著性,7.00±50419 vs 6.13±5.838, P=0.085。
3 运动仿真
3.1 模型建立
利用Adams/View建立如图1(b)所示的含有不同间隙的并联机器人模型。由于View约束库中缺少间隙约束类型,为达到与实际工况相近的含间隙仿真需要将含间隙转动副的作用机理与软件可供选择的约束类型相结合,建立与之等效的间隙约束。实际运动过程中转动副关节之间的转动特性由轴外径与轴套内径非线性接触约束,因此在仿真环境中需模拟这种运动约束。将含间隙时轴与轴套接触替换为同一平面上线与线之间的接触,用以替代两关节转动副的约束[19-20]。
设定末端点P(x0,y0)执行半径20 mm的匀速圆周运动,在10 s,100 step的仿真条件下进行不同Δei的运动仿真。
3.2 不含关节间隙的运动仿真
当Δei1=Δei2=0 mm时,独立支链系统是理想的冗余并联机构。由式(3)可知,末端点位置影响因子仅与θi1相关,故只需在冗余运动仿真下得θ11,θ21,θ31的变化规律,如图3所示。
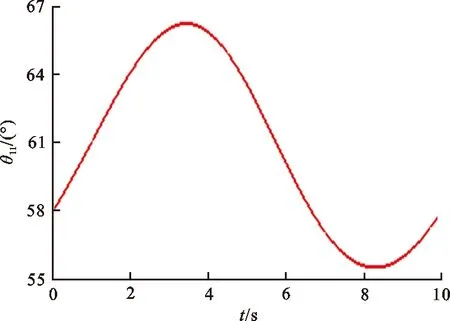
(a) θ11随t变化曲线

(b) θ21随t变化曲线
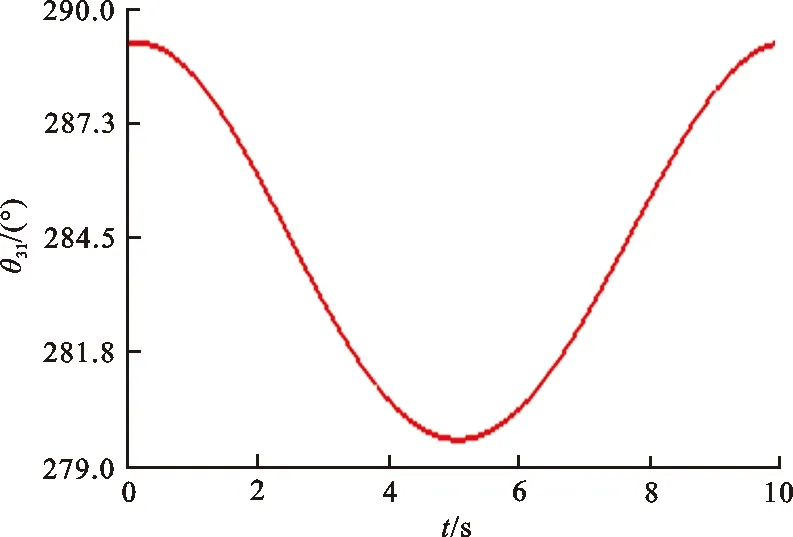
(c) θ31随t变化曲线图 3 主关节角θi1随t变化曲线Fig.3 The changing curves of active joint angle with time
3.3 支链A1B1P存在关节误差时运动仿真
在样机支链A1B1P中添加从动关节间隙Δe11与Δe12,进行并联机构运动学仿真,依次分析仅Δe11和仅Δe12间隙独立影响,以及同时有Δe11与Δe12时的实际Δe11,Δe12间隙变化,如图4所示。
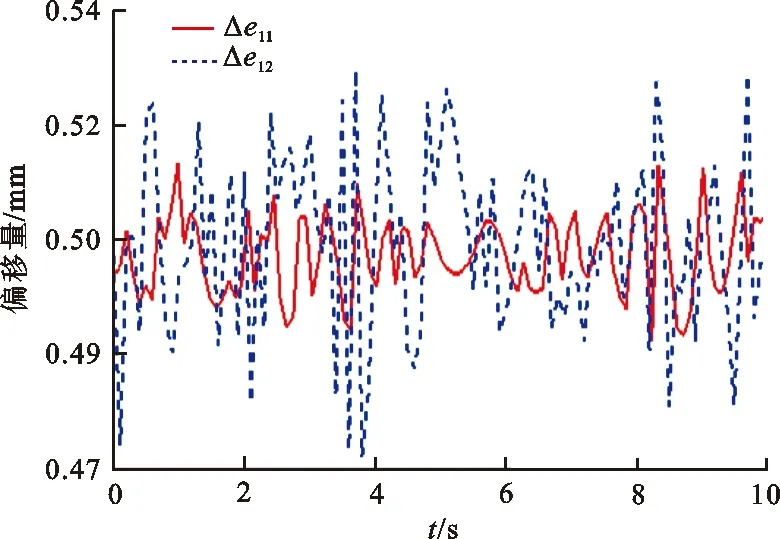
(a) Δe11=0.5 mm或Δe12=0.5 mm间隙曲线

(b) Δe11=Δe12=0.5 mm间隙曲线
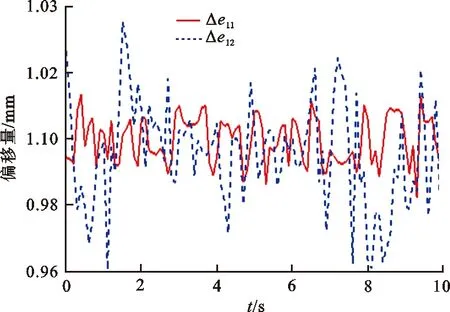
(c) Δe11=1.0 mm或Δe12=1.0 mm间隙曲线

(d) Δe11=Δe12=1.0 mm间隙曲线
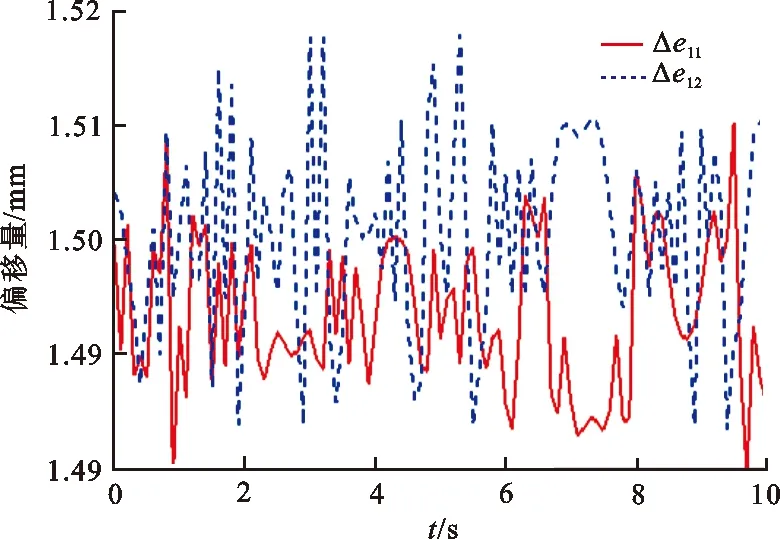
(e) Δe11=1.5 mm或Δe12=1.5 mm间隙曲线

(f) Δe11=Δe12=1.5 mm间隙曲线
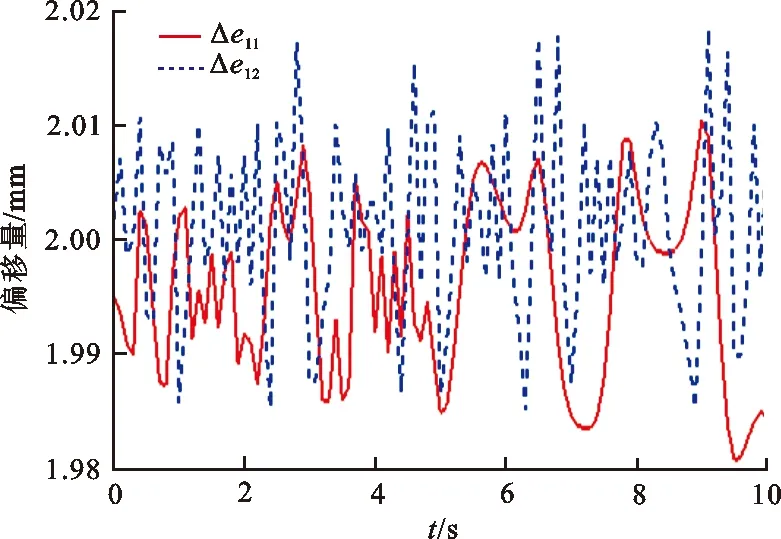
(g) Δe11=2.0 mm或Δe12=2.0 mm间隙曲线

(h) Δe11=Δe12=2.0 mm间隙曲线图 4 Δe11与Δe12变化曲线Fig.4 The changing curves of Δe11and Δe12
图4中,纵坐标是机构在运动过程中不同关节误差引起的该关节处轴与轴套的实际偏移量。图4(a),(c),(e),(g)分别为Δe11,Δe12单独作用时的关节间隙偏移量变化曲线;图4(b),(d),(f),(h)为Δe11,Δe12同时作用的关节间隙偏移量变化曲线。由于同一关节处的间隙偏移量在单一误差下的变化规律与在两间隙同时作用时的变化规律不同,因此仍然需要分析2个关节的偏移量,得到2个关节同时作用时的各关节偏移量的两条曲线(图4)。
由于各关节处轴与轴套偏移量的存在,使得转动角度产生误差,因此间隙直接引起的是转角误差。故进一步仿真得到独立支链A1B1P中含不同Δei时,与其对应主动关节角θ11随时间t的变化规律,如图5所示。图5中,“Δe11+Δe12”表示2个关节间隙同时存在且相等。

(a) 不同Δe11时,θ11随t变化曲线

(b) 含Δe11+Δe12时,θ11随t变化曲线图 5 不同关节间隙的θ11随t变化曲线Fig.5 The changing curves of θ11 in joint clearance with time
图5中,由于运动支链存在Δe11,Δe12间隙,在仿真条件下,当满足末端点P的运动轨迹,则支链A1B1P在不同间隙情况下的主动关节角会出现一定偏差。
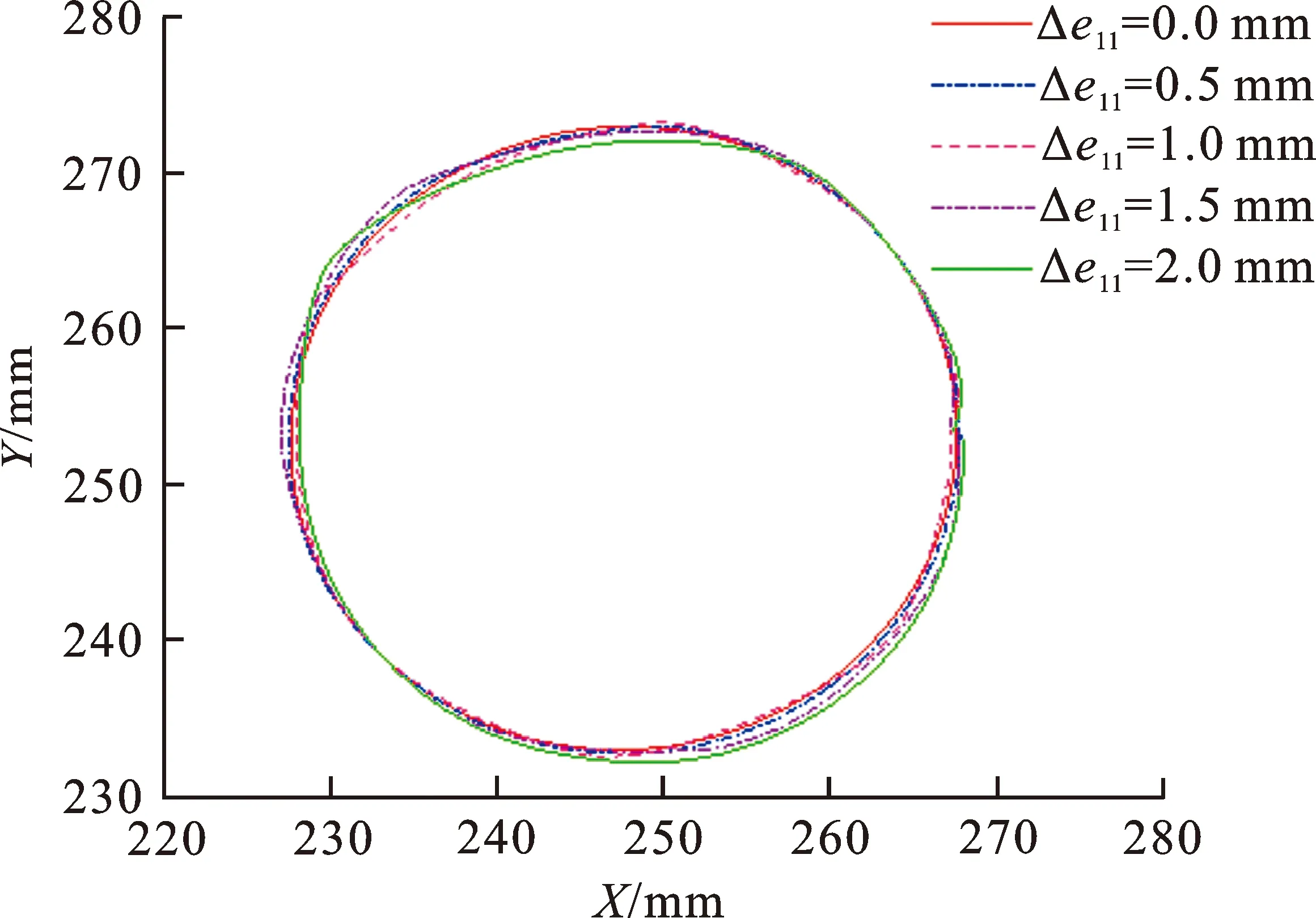
(a) 不同Δe11时P点轨迹

(b) 不同Δe12时P点轨迹

(c) 含Δe11+Δe12时P点轨迹图 6 含关节间隙的P点轨迹Fig.6 The locus of P-point with joint clearance
经理论计算可以看出,支链A1B1P在Δe11与Δe12存在时,P点运动轨迹不能保证理想的圆周运动,出现不规则变化的封闭曲线。
4 仿真结果分析

同理,计算统计出支链A2B2P中各轨迹曲线的相关参数如表2所示。
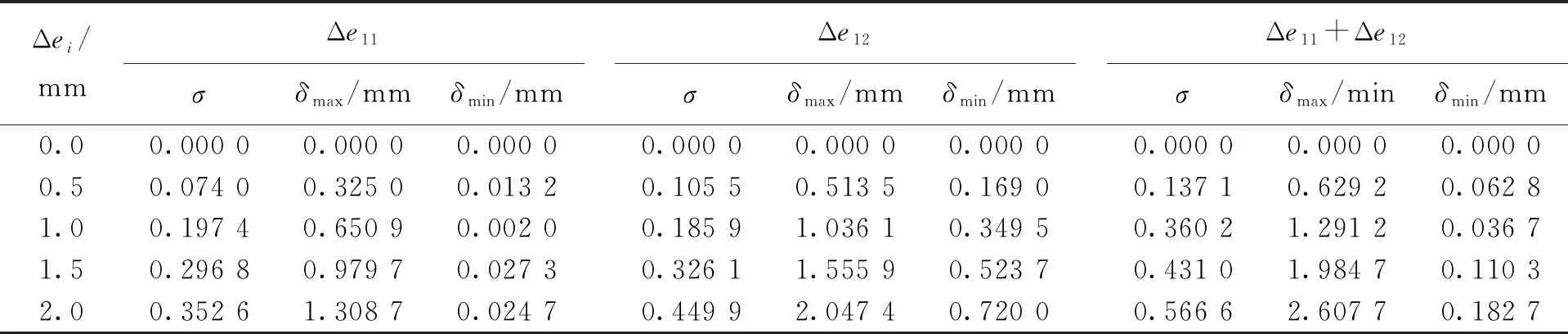
表 1 支链A1B1P含间隙时P点轨迹曲线σ值Tab.1 Standard deviation of P-point trajectory curves in branch A1B1P with clearance

表 2 支链A2B2P含间隙时P点轨迹曲线σ值Tab.2 Standard deviation of P-point trajectory curves in branch A2B2P with clearance
为直观反映支链AiBiP中不同Δei1,Δei2对末端点P的轨迹影响规律,由表1,2中标准差σ绘制含Δei1,Δei2时,P点轨迹相对于Δei1=Δei1=0 mm时的P点轨迹偏移量,如图7所示。
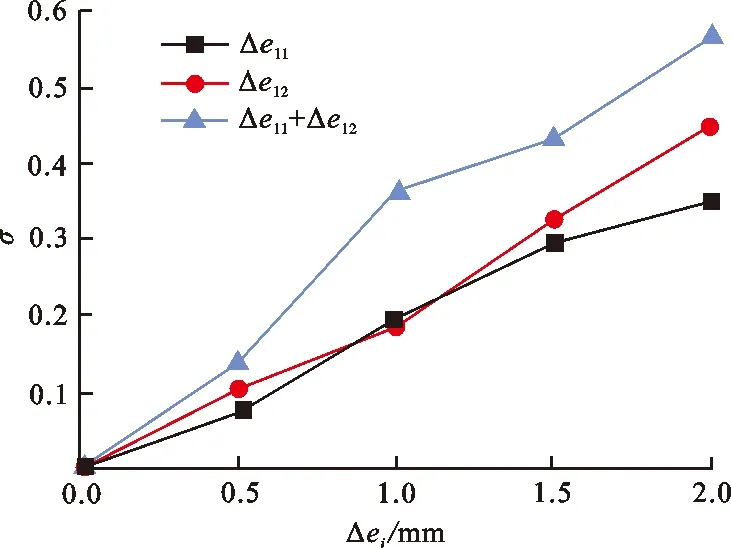
(a) A1B1P轨迹与σ值

(b) A2B2P轨迹与σ值图 7 支链A1B1P与A2B2P的σ值Fig.7 The values of σ of branch A1B2P and A2B2P
5 结 论
1) 平面冗余并联结构对某一支链而言,单一关节间隙误差对末端点的影响规律小于2个关节间隙共同作用时的影响。
2) 冗余并联机构中某一独立支链中2个关节间隙误差引起的轨迹偏差小于各间隙误差单独作用的累加。
3) 转动关节中间隙越大,导致其运行时末端点偏离标准轨迹的机率越大,同时偏差峰值也越来越大,严重降低机构运行精度。