刚性路面下自动巡检装置的运动学建模与分析
2020-04-08张振博马训鸣姜海谍
张振博,马训鸣,李 扬,姜海谍
(西安工程大学 机电工程学院,陕西 西安 710048)
0 引 言
高铁中继站的人工巡检存在劳动强度大、监测质量分散、安全风险高等不足,为了满足对中继站无人值守和安全运行的要求,基于四轮滑移转向机构的高铁中继站自动巡检装置得以应用。自动巡检装置通过控制左右车轮的转速差,使车轮产生纵向和侧向滑动来完成转向[1]。自动巡检装置运动学模型对研究其在空间内实时位姿、运动规律和运动控制有重要意义,研究自动巡检装置的运动学建模,重点在于考虑车轮滑动时的滑移率估算。文献[2-3]在车轮纯滚动无滑移这一假设下进行研究的,该情况下的滑移转向误差率大,难以满足精度要求。文献[4]提出根据纵向阻力和地面剪切变形模量的关系,估算履带式转向机构的纵向滑移率,文献[5-6]则采用了前者方法,并将其用于履带式车辆的轨迹跟踪控制。文献[7]把四轮滑移转向机构近似地视为履带式滑移转向机构,采用文献[4]的方法估算滑移率,但该方法仅适用于非刚性路面。文献[8-10]则构建滑模观测器估算纵向滑移率,具有收敛速度快,轨迹精度高的优点,但该方法只适用于轨迹跟踪控制的滑移参数估算。文献[11-13]采用计算瞬心坐标的方法估算滑移转向机构的实时位姿,使得运动学建模问题大大简化,但要求已知运动轨迹、回转角速度不能为零,适用性不强。
本文采用基点法,对自动巡检装置建立局部坐标系和全局坐标系,通过坐标变换对自动巡检装置质心在全局坐标系下广义变量的描述,得出自动巡检装置的运动学模型。在此基础之上,通过分析轮地作用力与附着率的关系,参考轮胎模型估算纵向滑移率,解微分方程得出质心的速度和位姿数据。该方法虽然计算复杂,但针对刚性路面模型精度高、适用性强。
1 自动巡检装置的运动学建模
在对巡检装置进行数学描述时,做如下假设:
1) 假设车轮与车架均是刚体,二者间仅存在相对轴向转动关系;
2) 假设同侧驱动轮转速相同, 车轮质心位于旋转中心上, 且4个轮子的几何中心均布于同一平面;
3) 假设自动巡检装置质量分布均匀,质心与几何形心重合,且仅在水平方向上旋转或者平移。
1.1 自动巡检装置的运动学分析
巡检装置通过左右车轮转速差和地面滑动摩擦的共同作用下产生不同转弯半径的滑移转向,稳态的滑移转向运动可近似理解为匀速圆周运动。滑移转向时的轮胎滑移可分解为车体局部坐标系下的纵向滑动和侧向滑动,实际情况下滑移转向是在车轮相对地面滚动和滑动的共同作用下产生的[14]。


图 1 滑移转向的运动学分析Fig.1 Kinematics analysis of slip steering
规定逆时针方向为姿态角θ的正方向,则局部坐标系下,自动巡检装置的运动学模型为
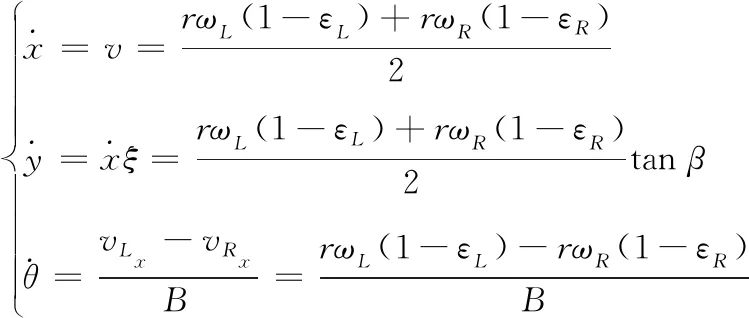
(1)
全局坐标系下,自动巡检装置的运动学模型[7]为
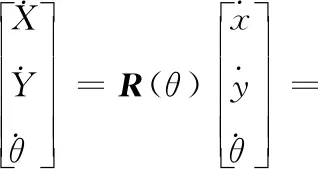
(2)

1.2 自动巡检装置的动力学分析
滑移转向时左右车轮的驱动力不一致而产生的横摆力矩,会迫使自动巡检装置绕运动平面的法线轴横摆转动[4]。滑移转向从初始到稳态这一过程,自动巡检装置既有纵向和侧向的加速度,又有横摆角加速度。质心绝对加速度既与局部坐标系下的质心速度的导数有关,又受横摆角速度影响[15]。滑移转向运动的纵向滑移率和侧向滑移率跟机构质量、牵引力、纵向阻力和侧向阻力等力学因素有关。
稳定滑移转向状态下,机构绕瞬心ICR圆周运动的切向加速度为0,此时机构处于受力平衡状态。根据达朗贝尔原理,列出质点系平衡方程

(3)

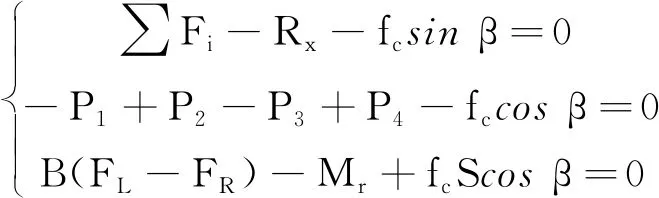
(4)
式中:Fi(i=1,2,3,4)为所对应的车轮的牵引力,同侧牵引力相同,F1=F2=FL,F3=F4=FR;Pi(i=1,2,3,4)为对应车轮的侧向阻力;Rx为纵向阻力的合力;Mr为侧向阻力产生的转动阻力矩;fc为机构的运动惯性力。fc数学表达式为

(5)
1.2.1 纵向阻力分析 纵向阻力Ri等于车轮所受支持力Ni与纵向动摩擦因数fr的乘积,表示为Ri=frNi,(i=1,2,3,4)。

图 2 纵向阻力分析Fig.2 Longitudinal resistance analysis
图2是自动巡检装置的竖直方向受力分析图,NL和NR分别表示机构左右车轮所受支持力的合力,h为质心C距地面高度,列出受力平衡方程为

(6)
同侧车轮所受支持力相等,N1=N2,N3=N4,纵向阻力表示为
(7)
1.2.2 侧向力分析 自动巡检装置沿地面侧向滑移时,地面对车轮有侧向阻力Pi(i=1,2,3,4)。车轮与地面接触面上各点所受侧向力f(x)与到瞬心ICR的纵向距离x呈正相关[16],即f(x)=kx。
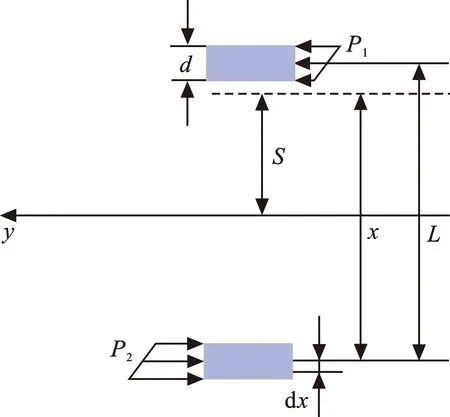
图 3 侧向力分析Fig.3 Lateral force analysis
图3所示为左侧两轮的侧向力分布图,其中d是轮胎与地面接触线的纵向长度。滑移转向的侧向力分布关于车身纵轴对称,即P1=P3,P2=P4,则4个轮子侧向力表示为

(8)
总侧向力等于重力与侧向阻力系数的乘积,即P=μtW,则相关系数为
(9)
联立式(8),(9)得

(10)
1.2.3 转动阻力矩 巡检装置滑移转向时,侧向力对瞬心的转矩将阻碍机构横摆运动,该转矩称为转动阻力距,用符号Mr表示,可得以下关系式:
(11)
1.3 纵向滑移率和侧向滑移率
1.3.1 纵向滑移率 轮胎与刚性路面纵向滑移率可通过相应的数学模型表示,Burckhardt等在大量的轮胎与路面实验基础上得出了一种半经验的μ-s轮胎模型[17],模型表达式为
μi=c1(1-exp(-c2εi))-c3εi
(12)
式中:μi(i=1,2,3,4)为车轮附着率;纵向滑移率ε1=ε2=εL,ε3=ε4=εR;c1=1.197 3,c2=25.168,c3=0.537 3,为干混凝土地面辨识参数。附着率是纵向滑移率的函数,且不论对驱动还是制动,其变化规律都是相同的[18]。在此特别指出,当车轮处于牵引状态时,纵向滑移率取正值;反之处于制动状态,纵向滑移率取负值。
车轮附着率是驱动轮所受的切向力Fa与法向力Fz的比值[19-20],朱燕燕等[21]指出该关系式仅适用于直线运动的情况,对于滑移转向运动而言,不能完全表达接触力与附着率的关系,合理的滑移转向车轮附着率表达式为

(13)

1.3.2 侧向滑移率 侧滑因子S与侧向滑移率ξ存在数学关系ξ=2S/B,其数值和质心的侧向速度有关,通过力学分析,将式(5),(7),(10),(11)代入式(4)可得自动巡检装置滑移转向的侧向滑移率为

(14)
2 运动学模型验证
建立与高铁中继站自动巡检装置等效的虚拟样机,如图4所示。

图 4 自动巡检装置的虚拟样机Fig.4 Virtual prototype of the automatic inspection equipment
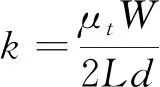
虚拟样机模型的地面—轮胎接触力参数、机构参数和轮地作用力参数见表1。
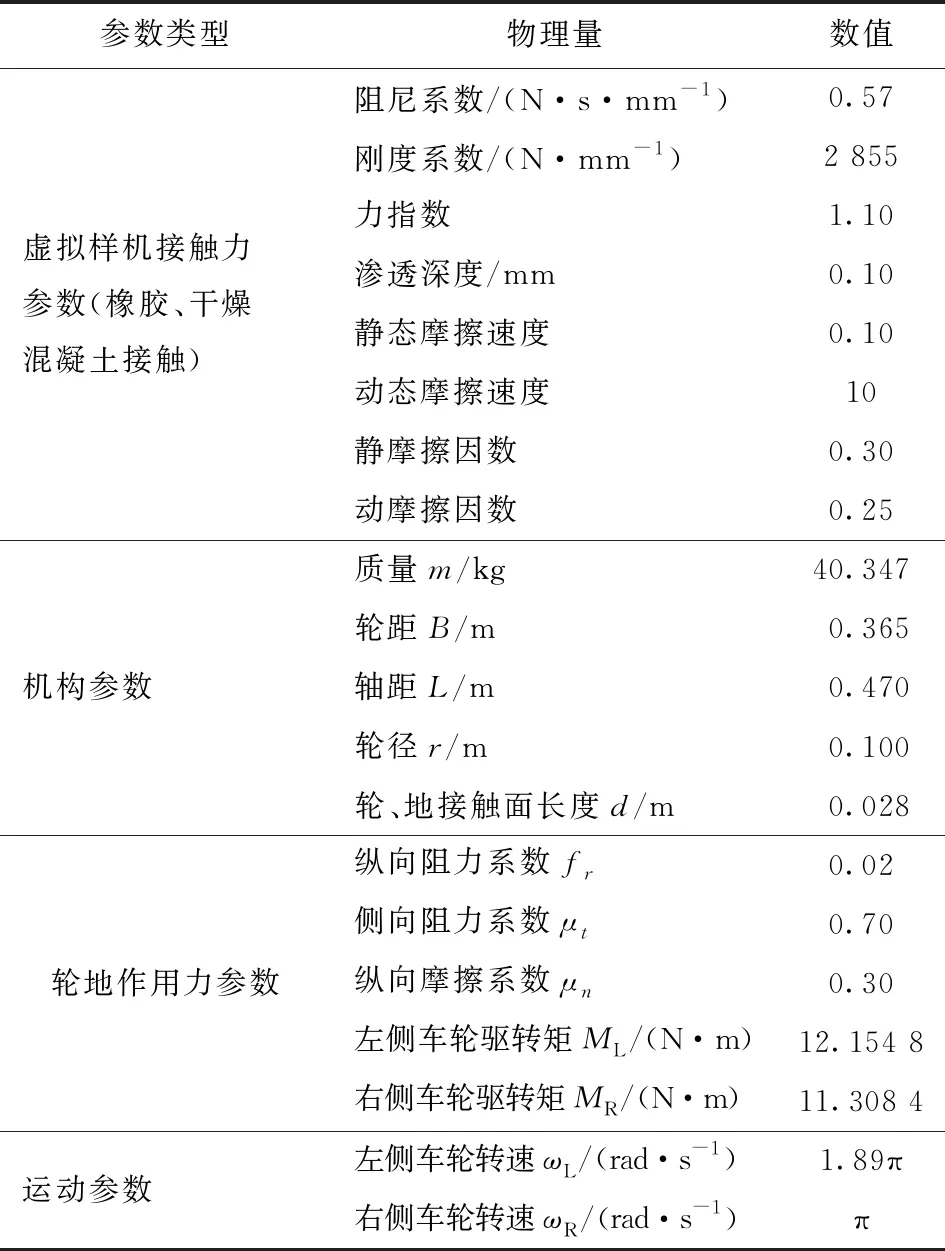
表 1 模型参数表Tab.1 Model parameters
2.1 运动学模型求解与虚拟样机仿真
针对运动学模型,结合表1 数据,时间跨度30 s,时间步长0.1 s,计算出不同时刻的理论实验数据。为验证运动学模型的正确性,对虚拟样机模型仿真得出表1 参数下的质心轨迹、速度等仿真实验数据。
2.2 误差分析
为避免稀释误差率数据,以一个完整的滑移转向周期进行分析,综合对比运动学模型与虚拟样机的各项转向特性数据。

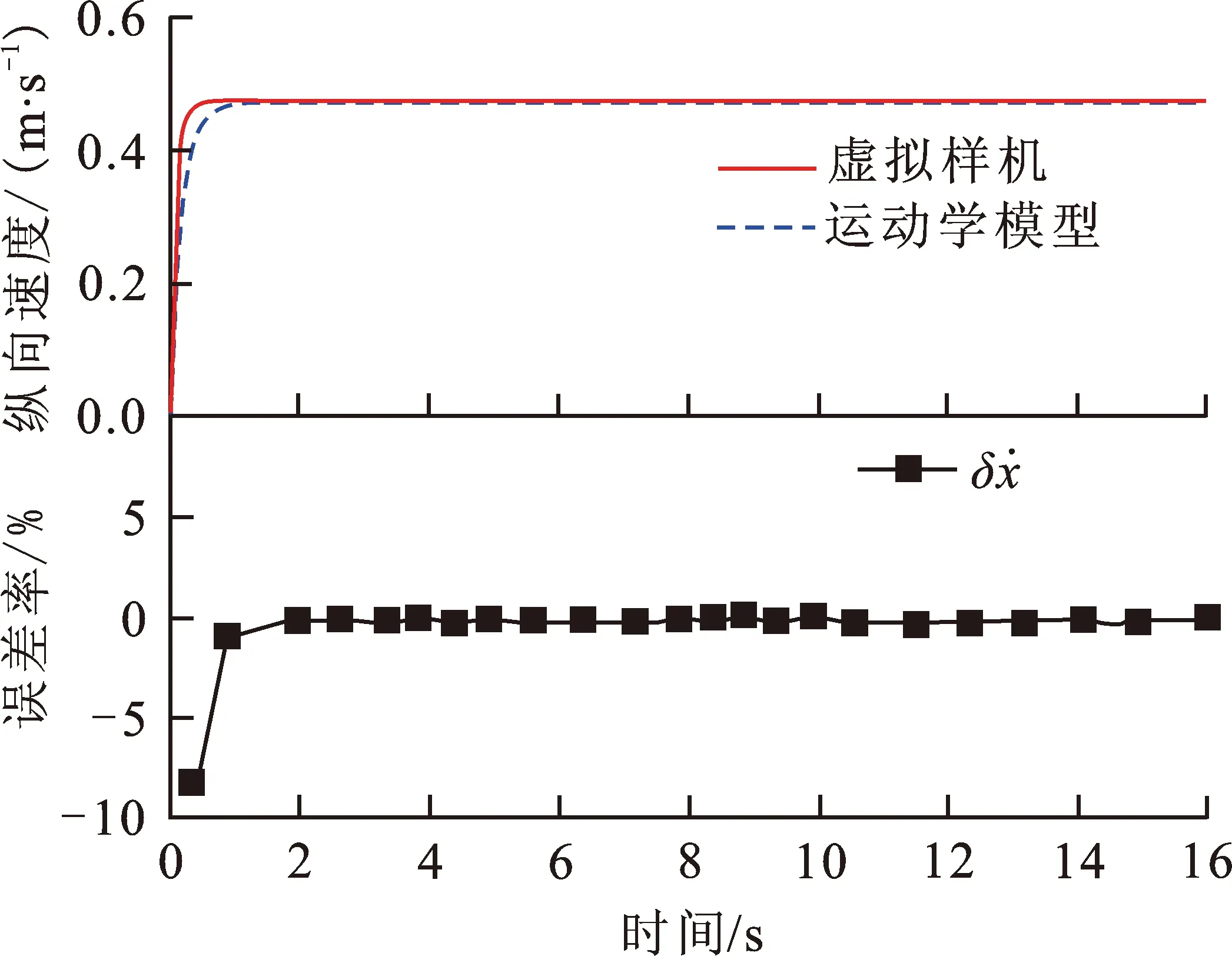
图 5 纵向速度与误差率Fig.5 Longitudinal velocity and percen-tage error
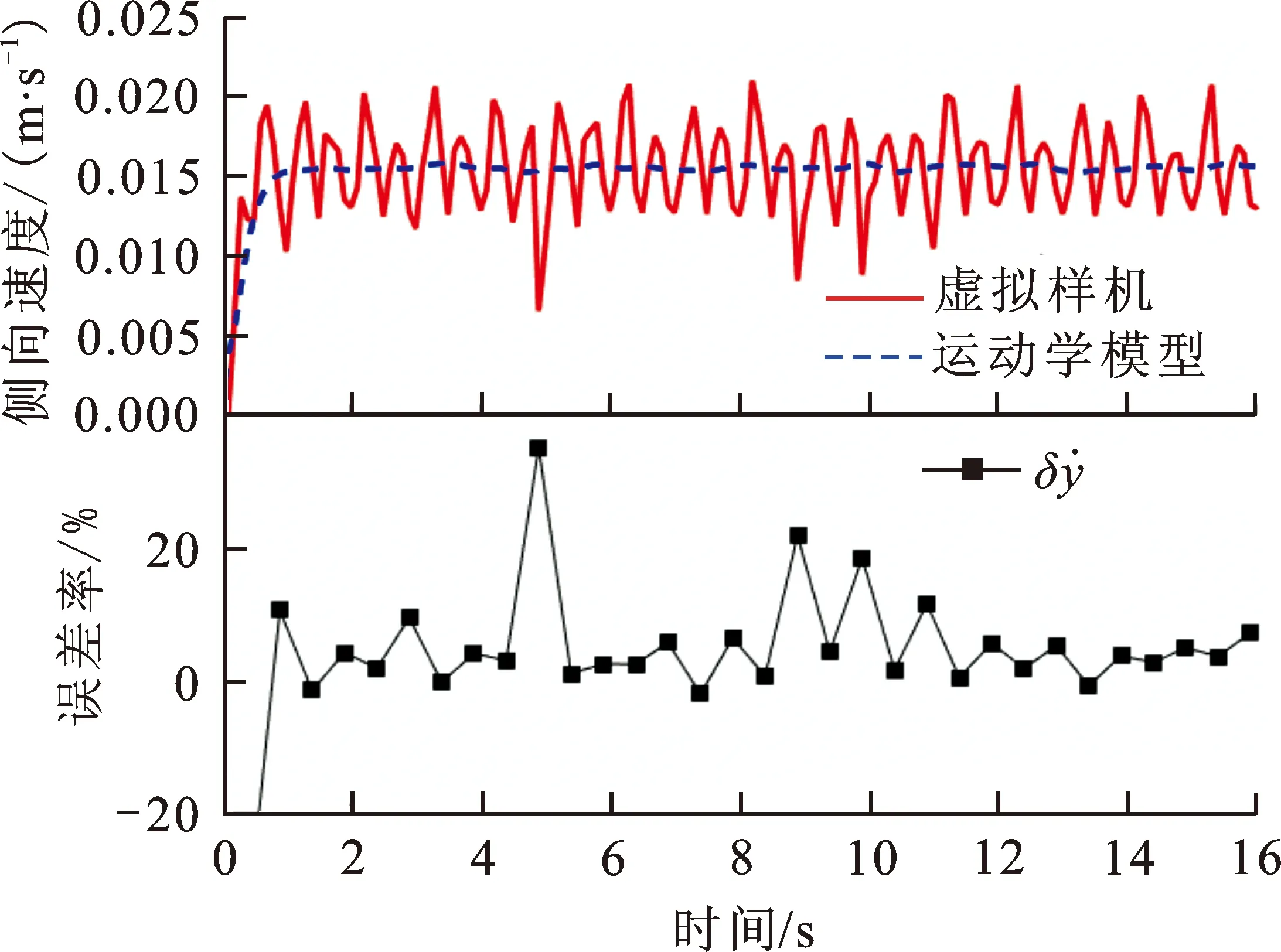
图 6 侧向速度与误差率Fig.6 Lateral velocity and percentage error
图5中,加速阶段运动学模型和虚拟样机的速度变化略有差异,稳态阶段二者速度基本保持一致。由图6所示的侧向速度曲线可以得知,运动学模型速度曲线走势平稳,虚拟样机速度曲线则波动明显。同样,对比图7姿态角速度曲线可以发现,前者在整个滑移转向周期内有轻微的波动,后者则相对平稳一些。本文中所建立的运动学模型不考虑轮地摩擦产生的机械振动,而虚拟样机在滑移转向时受到轮地摩擦振动,在速度方向有振动位移,再者侧向速度数值较小,所以波动明显。纵向速度也存在数值波动,而纵向速度数值较大,波动较小,两侧纵向滑移率波动也较小,由于姿态角速度与纵向滑移率有关,因此姿态角速所受影响相对要小很多。
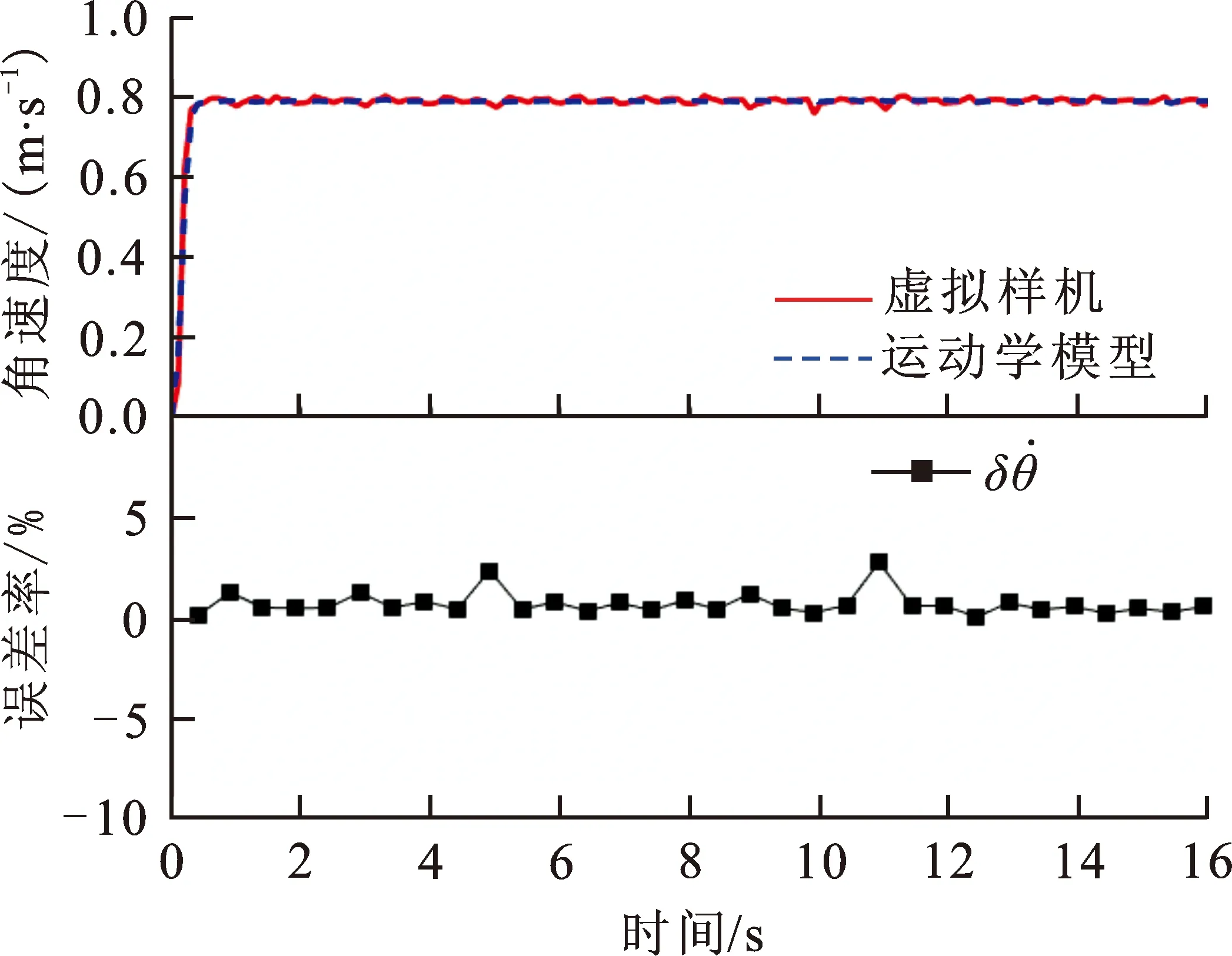
图 7 姿态角速度与误差率Fig.7 Attitude angular velocity and per-centage error
表2是图5~7中3个速度在滑移转向加速阶段(0~0.5 s)、稳态阶段(0.5~15.9 s)和完整周期内的速度期望、平均误差率和方差。
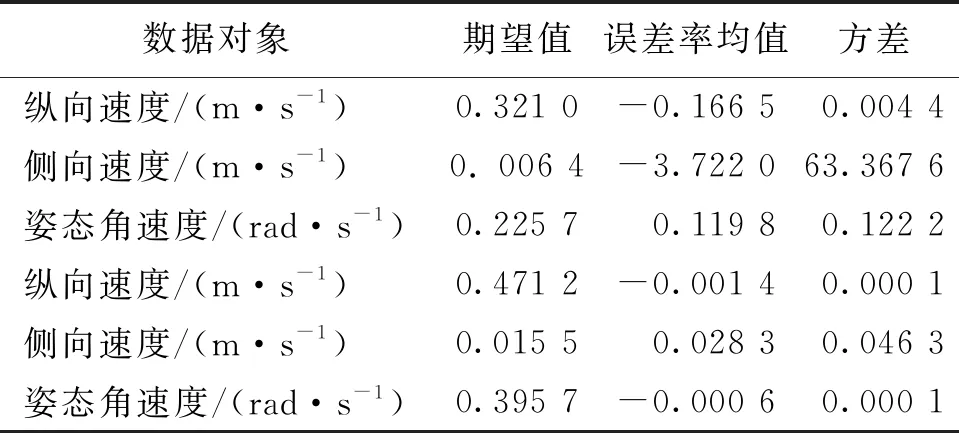
表 2 速度数据分析Tab.2 Analysis of velocity data
图8为一个转向周期内的滑移转向质心轨迹对比,可近似看作为圆形,转弯半径约1.192 m,可见滑移转向过程中二者差距不大,轨迹基本重合。相比虚拟样机,滑移转向过程中运动学模型的质心轨迹始终在同一个方向上有偏移,但由于稳态阶段占整个滑移转向周期的96.86%,并且该阶段纵向速度误差率极小,侧向速度误差率虽大但数值小,不足以造成图中的所示的误差量;再者考虑到轨迹偏移情况,说明虚拟样机速度略大,其偏移状态也正好与表2中数据吻合。
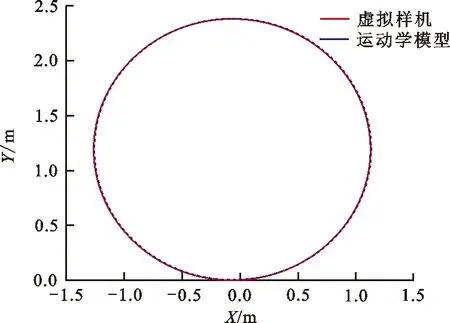
图 8 质心轨迹Fig.8 Centroid trajectories
图9是一个滑移转向周期内位姿误差和角位移的关系。Δθ,Δs分别表示全局坐标系下,运动学模型和虚拟样机的姿态角误差、二者质心轨迹相对于初始点(0,0)的位移误差。相比滑移转向的稳态阶段,受摩擦振动干扰的非稳态阶段的初始速度小,加速时间短,即使速度误差稍大,二者位移也相差不大,所以呈现出图中Δθ,Δs曲线。整个滑移转向周期内,位姿角最大误差0.006 2 rad,平均误差0.004 1 rad,方差1.63×10-6,由此可见姿态角误差较为可靠;位移误差则呈类正弦周期性变化,周期15.9 s,最大误差0.015 4 m。
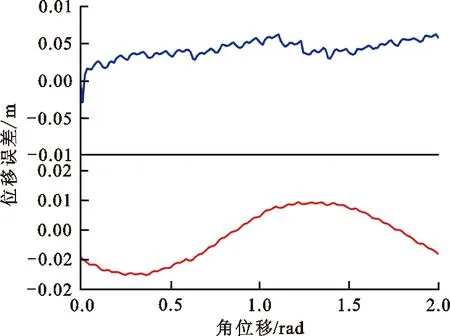
图 9 位姿误差 Fig.9 Pose errors
滑移转向涉及内容复杂,其中包含摩擦和振动等因素。上述内容仅考虑在特定地面参数作用下的运动状态,存在滑移摩擦产生的振动、转动副摩擦等因素造成的误差。但由于运动学模型与虚拟样机质心位姿误差在要求范围之内,故认为该实验条件下,摩擦振动对滑移转向稳定性的影响可以忽略不计。
3 结 语
1) 建立了针对刚性路面的高铁中继站自动巡检装置的运动学模型;对自动巡检装置进行了动力学分析;搭建了高铁中继站巡检装置的虚拟样机。
2) 利用Matlab解运动学方程,得出滑移转向的理论数据,利用Adams仿真虚拟样机,得出滑移转向的仿真数据。分析了局部坐标系下,运动学模型和虚拟样机的纵向速度、侧向速度、姿态角速度误差率;分析了全局坐标系下,二者的位置误差和姿态角误差。结果表明:转弯半径1.192 m的稳定滑移转向运动状态下,姿态角误差在0.006 2 rad以内,位移误差在0.015 4 m以内,达到了高铁中继站自动巡检装置的运动学模型精度要求。该运动学模型可应用于刚性路面下巡检装置滑移转向的运动轨迹估算。