修井作业过程中油管抓取移运机器人的分析
2020-04-07李顺治
李顺治
摘 要:结合工程上对修井作业过程中对油管进行抓取的实际需求,结合PLC技术,设计出六自由度修井作业油管抓取移运机械人用于修井作业。油管抓取移运机器人的主要构造由底座、升降机构、旋转机构、摆动机构和机械手等组成。可以实现对油管的抓取、移动以及定位作业,实现修井作业过程中的油管移动的各项需求。
关键词:修井作业 油管抓取 机器人
中图分类号:TP24 文献标识码:A 文章编号:1672-3791(2020)01(b)-0066-02
由于修井作业中的油管作业有着很多的工作量,而且占用较多的时间。所以需要结合油管作业的实际情况,提高油管作业的自动化程度。研发出一种基于PLC技术控制多自由度油管抓取移运机器人作为目标装置,可以实现在1m的范围内对油管进行抓取和移位功能。
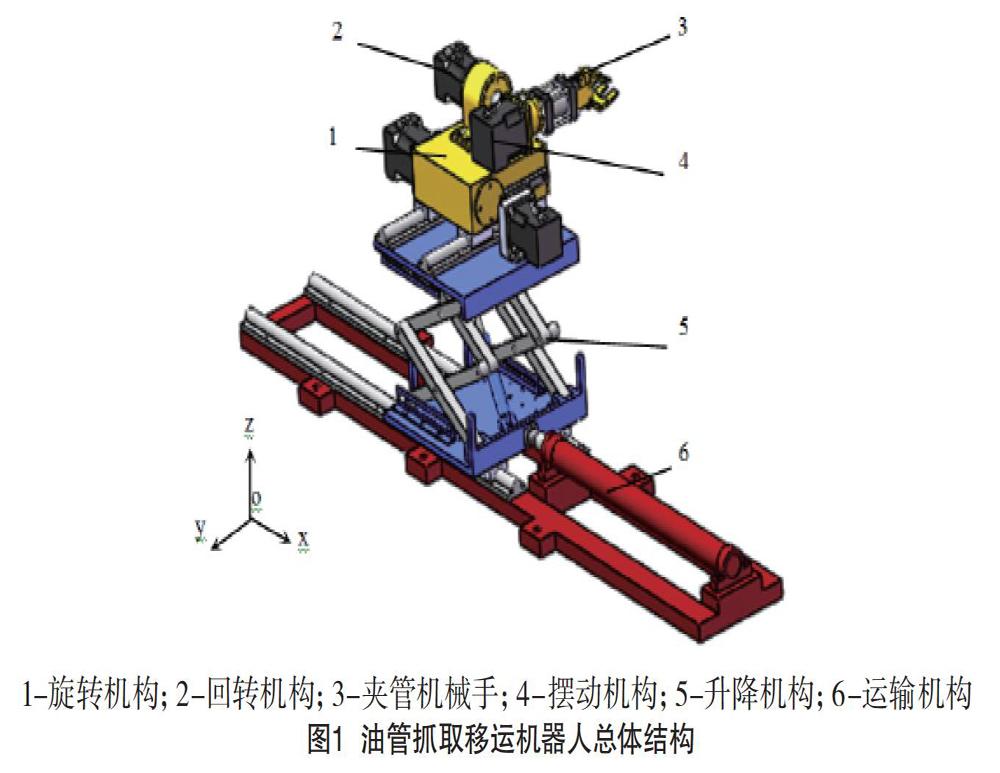
1 修井作业过程中油管抓取移运机器人的总体结构
修井作业油管抓取移运机器人的空间结构如图1所示,修井作业油管抓取移运机器人在组成部件上由机械手、摆动机构、回转机构、旋转机构等组成。机械手主要是对油管进行抓取的机构,通过机械手的运动,可以实现对油管的快速抓取。摆动机构主要是实现机械手能围绕固定的结构进行自由旋转。回转机构主要是实现机械手能够围绕水平方向进行自由的旋转,当面对位置不准确的油管进行自由调节位置。底盘旋转机构主要是使得传动机构能在垂直方向进行自由旋转,与此同时,还能够实现电机在水平方向上进行设计范围内的区间进行自由移动,从而能够实现将油管进行自由的移动。折叠升降机构主要是让机械手在不同的高度的时候,可以进行升高或者降低的移动。由于液压缸能够直接作用于接杆件,可以让机械手在垂直方向上实现3m的自由移动。底座运输机构则主要是对直线滑轨进行作用。由于升降机构的底座直接与滑块进行连接,这使得液压缸能够直接使得机器人在井口的位置内实现10m的自由移动,从而可以将油管从井口内移到井口外或者是将油管从井口外移动到井口内。
2 修井作业过程中油管抓取移运机器人工作原理
2.1 从管排架抓取油管并移运至实验井口定位
从管排架抓取油管并移运至实验井口定位需要操作折叠升降机构降低到最低水平,调整机械臂中的回转结构使得机械手摆动与夹管能够在合理的范围内进行移动。通过升高液压缸,能够使得机械臂回转结构沿着固定的方向进行运动。机械手臂按照设计的方向对油管进行抓取。在完成油管抓取以后,滑轨液压缸进行伸长,机器人将会移动到管排架以及井架之间。机械手摆动将会旋转到水平方向,操作底盘将会转动到垂直方向,通过升降机构以及机械内的各个部位移动,使得油管能够正对着口井。
2.2 从井口抓取油管并移运至管排架排放
从井口抓取油管并移运至管排架排放主要是滑轨液压缸不断伸长,机械臂回转结构能够在机械内部的齿轮带动作用下进行滑轨,底盘则转动到原先垂直的方向,机械手摆动也会旋转到之前的垂直方向。在这个时候,调节设备,使得能够对准井口,在完成油管抓取以后,液压缸进行回缩,机器人将会带领油管移动到井架位置。機械手臂再转动垂直方向,底盘旋转机构也反向转动到垂直方向,使得油管从空间上的垂直转变为空间上的水平状态。滑轨液压缸能够直接运动到程序所指定的地方,结合机械内部的齿轮运转,能够将油管运动到预先的位置,从而能实现将油管下放到指定的地方。
3 油管抓取移运机器人的控制系统
依照上述油管抓取移运机器人对油管进行相应操作,其中包括了对PLC、开关电源、继电器、行程开关等控制系统的设计。由于工控机是作为系统中的上位机进行使用,选择西门子的S7-200CPU226作为此次设计过程中的下位机。该系统能够通过各个信号发射装置,将信息传输到输入模块中,然后再将处理过后的信息传递到工控机上,以实现对所输入的信息数据进行及时的处理。工控机的监控程序包括了对PLC数字的输出,并通过系统中相应的模块进行处理输出信号,最终达到对整个控制装置的信息收集以及控制。控制程序主要结合现场的油管抓取详细工作需求进行设计,通过组态软件来对机器人的实际运作状态进行实时监控,在组态软件上可以实现对油管抓取移运机器人的各项运动参数的收集以及展示。该系统还能实现对油管抓取移运机器人的自动抓取油管操作、系统校正操作等。
4 结语
基于PLC技术控制多自由度油管抓取移运机器人能够在三维空间上实现6个自由度的工作,该机器人能够通过闭环进行控制,能够对运动进行实施的控制以及调节,为后续对修井作业过程中的机械装置自动化升级和研发提供了参考的解决方法。
参考文献
[1] 刘文刚.钻修井作业管柱处理模拟系统设计与分析[D].东北石油大学,2017.
[2] 程新颖.新型修井作业机械化系统耦合——集成建模与仿真[D].大庆石油学院,2010.
[3] 徐成均.井下作业修井技术现状及新工艺的优化[D].东北石油大学,2010.
[4] 李明浩.修井作业井口自动化装置设计研究与仿真[D].东北石油大学,2014.
