基于MEMS惯导的机载两轴稳定平台方案
2020-04-06赵春标沈桂鹏杨凡宇
赵春标,沈桂鹏,杨凡宇,张 毅
(南京熊猫汉达科技有限公司,南京 210000)
0 引言
目前,通用的机载跟踪系统往往基于成本等因素综合考量后,选择机载惯导作为姿态输入,伺服控制系统的性能较大的以来于机载惯导的输出精度以及系统转发延迟,对于宽体载机飞行速度慢,盘旋角度与加速度等较低情况可以保证稳定平台系统指向的准确性;但轻型载机速度与加速度较大时数据转发延迟等因素严重制约着设备的跟踪精度,在无法要求载机提高机载航姿设备提高输出频率以及降低系统转发延迟的情况下需要基于新的载体信息输入等手段提高系统响应。
1 天线基于机载惯导的控制模式
经过对飞行试验数据的分析与仿真,结合卫通天线的伺服控制机理与目标跟踪算法,初步定位为机载惯导的数据误差或数据传输的延时影响了天线的跟踪性能。下面为具体分析:
卫通天线加电初始化完成后,等待惯导精校准后,卫通信道传来对星数据指令,按照飞机加载卡中的同步卫星的参数,以及惯导提供的载体经纬度坐标等,通过如下公式天线伺服控制系统计算出卫通天线理论俯仰角、理论方位角以及理论极化角:
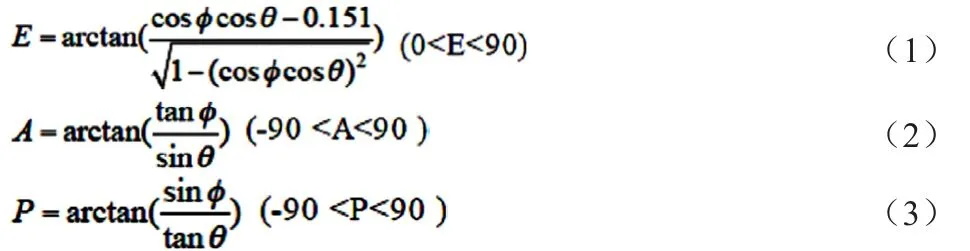
式中,为当地经度与卫星经度之差;θ为当地纬度;E为天线理论仰角;A为天线理论方位角;P为理论极化角。
当卫通天线自动对星之后,飞机运动时,天线是依靠于伺服跟踪系统中机载惯导模型来跟踪卫星的。惯导模型的建立主要思想如下:
两坐标系任何复杂的角位置关系都可以看成有限次基本旋转的复合,变换矩阵等于基本旋转确定的变换矩阵的连乘,连乘顺序依基本旋转的先后次序由右向左排列。例如卫通天线的空间姿态可看做依次绕航向轴、俯仰轴、横滚轴做基本旋转后的复合结果,如图1所示。图中,n坐标系为地理坐标系,Xn指东、Yn指北、Zn指天,b坐标系为地理坐标系,Xb指右、Yb指前、Zb指上。卫通天线的空间角位置由下述依次基本旋转确定:

各次基本旋转对应的变换矩阵为:

所以姿态矩阵为
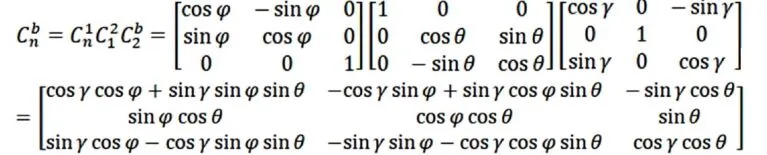
式中,Cbn与旋转次序有关,即当旋转角φ、θ、γ不都为小角时,对应于不同的旋转次序,坐标系b的最终空间位置是不同的,这就是常说的有限转到的不可交换性。
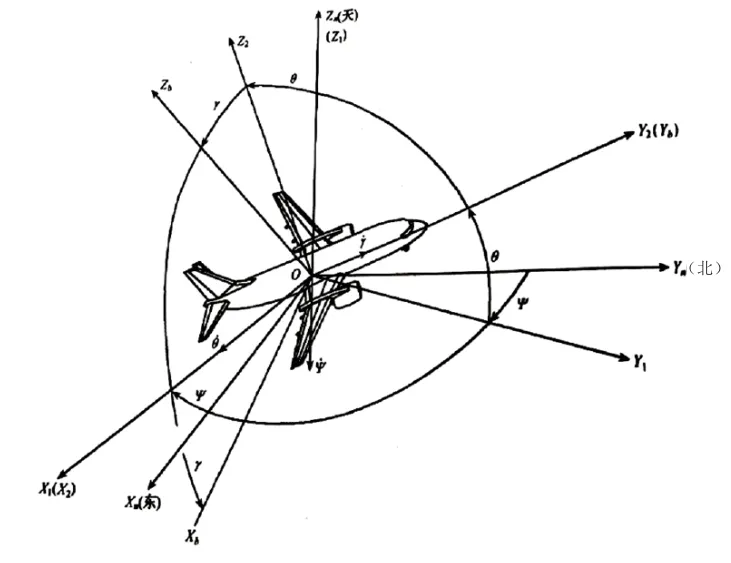
图1 飞机坐标系旋转示意图
因此,惯导数据的不精确、数据传输的滞后,都将影响天线的跟踪精度。
2 基于机载惯导的模型分析
首先分析惯导精度对天线跟踪的影响:假设将天线的跟踪精度控制在为0.5 dB,该型天线方位角方向图和俯仰角方向图如图2、3所示,由图2和图3可以得到中心点信号下降0.5 dB的转角位置。
分析图2,可知天线在不同的频段0.5 dB衰减对应的方位角波束宽度基本一致,大致为1.2°,根据项目的技术指标要求,可以限定天线角度偏差ε≤0.6°。

图2 Z-X型天线方位角方向图

图3 Z-X型天线俯仰角方向图
分析图3,可知天线在不同的频段0.5 dB衰减对应的俯仰角波束宽度亦基本一致,大致为1.3°,根据项目的技术指标要求,可以限定天线角度偏差ε≤0.65°。
当惯导精度产生误差时,会影响天线的转角。一般来说,由于惯导工作原理的限制,惯导的航向误差比俯仰误差和横滚误差要大得多,因此只对惯导的航向误差带来的影响进行分析。假设飞机的横滚角分别为0°、35°,当惯导的航向误差为0°~10°时,利用公式(1)、(2)、(3)与坐标系余弦矩阵转换进行仿真运算可以得到图4所示的结果(仿真曲线以哈尔滨的位置信息计算,且假设飞机俯仰角为0°)。图4(a)、(b)分别对应横滚角0°、35°的情况,横坐标代表惯导的航向误差,步进0.1°,范围为0°~10°,纵坐标表示惯导航向误差带来的转角误差。
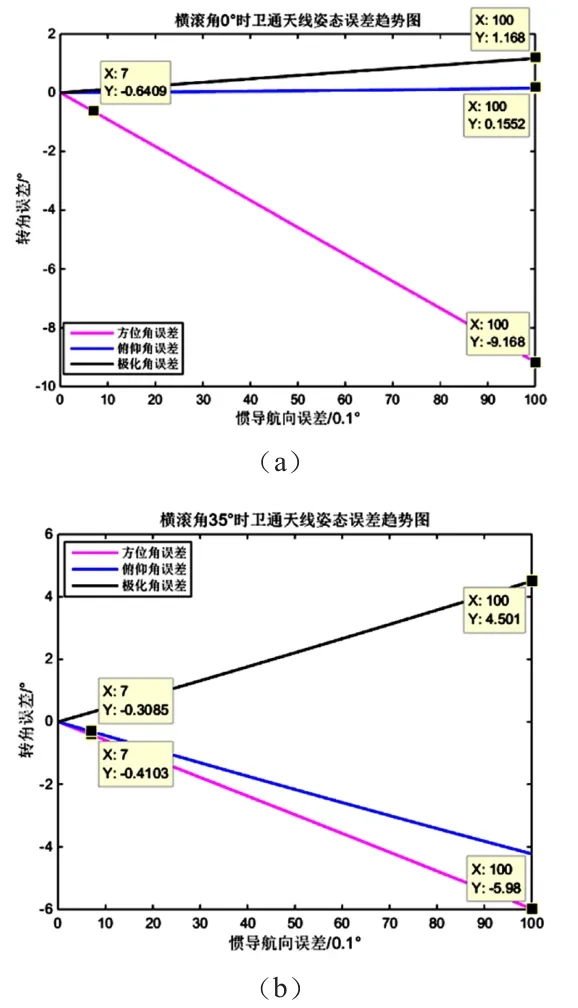
图4 惯导航向误差与天线姿态误差趋势图
观察图4,通过分析,发现横滚角越小,因惯导航向误差带来的方位角转角误差越大,造成的俯仰角误差反之越小。当横滚角为0°时,若惯导航向误差为0.7,则会导致天线的方位转角产生0.64°的误差,俯仰的误差基本为0。
当横滚角变大时,惯导航向误差会造成方位和俯仰两个角度同时偏差,若惯导航向误差为0.7,则会导致天线的方位转角产生0.41°的误差,俯仰角产生0.31°的误差,两者误差的综合影响比横滚角0°时的单轴向影响大得多,这也是飞机盘旋角度越大,天线跟踪性能越差的原因所在。
综上分析,由于直-X载机惯导的航向误差较大(多次测试结果表明惯导航向误差在1°左右),提供给天线不精确的载体姿态会使天线产生严重的指向偏差,从而致使整个卫通系统功能瘫痪。
3 仿真及跟踪精度影响
考虑到直升机对天线体积与重量的限制,同时综合成本、性能等多方面因素,建议在天线上加装精度较高MEMS惯导。
经过对国内外多种型号MEMS惯导的性能摸底,发现目前大多数中高精度的MEMS惯导方位欧拉角随机漂移普遍在1°/h至360°/h之间。因此,天线在指向卫星的过程中必须结合信号跟踪来弥补惯导的随机漂移。即在利用惯导解算姿态变化的同时,依靠信标值(AGC)的大小变化进行适当的调整。实现天线跟踪的过程如图5所示。
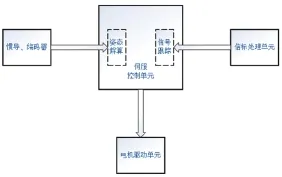
图5 天线跟踪原理示意图
其中,惯导用来采集载体姿态变化数据,编码器则实时反馈天线的当前姿态。理论上来说,利用惯导矩阵解算与天线编码器反馈可以保证天线一直准确指向卫星,但是随机漂移会导致惯导刻画载体姿态失准。通过对信标处理单元AGC值的分析与计算,可以实现天线的自动信号跟踪。
在该推导结论的基础上,结合快速傅立叶变换(FFT)数字信号处理技术提取信标信号的频域特征,可以充分滤除干扰信号,极大地弥补信标在时域处理时产生的误差和抖动缺陷。采用该跟踪方法的机载卫通平板天线在某型旋转翼飞机平台上升降、悬停、大角度盘旋、爬升俯冲等机动飞行中跟踪效果良好。在某次飞行跟随试验中,以2 Hz的采样频率采集天线的AGC值,并通过界面人为设置跟踪模式的开启与关闭,得到图6所示的飞行数据图。数据表明,未加跟踪时,天线随着飞机平台姿态的变化AGC值抖动剧烈,指向误差较大;加入跟踪后,天线跟踪能够很快收敛,很好地抑制了飞行姿态变化引起的信号跌落。

图6 飞行试验数据图
为了验证跟踪的收敛性,在方位指向偏离2° 后(此时信标信号跌落约4 dB),通过自动跟踪算法可以在3个扫描周期(3 s左右)恢复最大信标,因此,完全可以弥补中高精度MEMS惯导的随机漂移。因此,通过信号的自动跟踪补偿MEMS惯导随机漂移的方案是一种优化方案。
4 结束语
基于自身惯导的模型可以有效的弥补机载天线惯导转发延迟,并借助机载惯导的欧拉角长期稳定的特点进行修复,同时依据卫星信标值进行漂移修正。极大地提高了天线的指向精度。保证设备卫星指向,同时保障通信稳定,具有较高的工程价值。