基于等效因子优化的插电式混合动力客车自适应能量管理策略
2020-04-03张幽彤胡韶奕
杨 业,张幽彤,张 彪,胡韶奕
(1.北京理工大学清洁车辆实验室,北京 100081; 2.华北理工大学轻工学院,唐山 063000)
前言
近年来,由于节能和环保的需求,新能源汽车发展迅速,插电式混合动力客车(PHEB)兼顾了电动汽车和传统汽车的优点,备受国内外企业以及研究机构的青睐[1-3]。PHEB整车性能与能量管理策略密切相关,最优的能量管理策略能合理分配动力系统能量流动,充分发挥传统发动机和电机的优势,获得整车最佳性能[4-5]。
目前,研究人员对PHEB控制策略进行了大量的研究,总的来说,可分为基于规则的控制策略和基于优化的控制策略两类。基于规则的控制策略包含确定性规则和模糊逻辑规则[6-7]。这些规则可通过实际工程经验或离线优化策略制定。基于优化的控制策略可以分为全局优化和实时优化。常用的全局优化算法包括动态规划、遗传算法、粒子群算法、变分法和智能型的神经网络算法等[8-9]。虽然全局优化算法可以得到理论上的全局最优解,但是计算量太大,未能实时应用。
至于实时优化控制,其最具代表性的优化方法是等效油耗最小控制策略(ECMS)[10]。它比全局优化的计算量小、实时性强。因此,国内外专家对ECMS进行了大量的研究,取得了不错的进展[11-12]。在应用ECMS优化的过程中,等效因子是关键的动态变量,决定着ECMS实时优化的性能。为获得精确的等效因子,很多学者提出了改进的ECMS。文献[13]中利用射击算法求解等效因子初始值,然后采用PI控制器追踪参考SOC,获得实时的等效因子。文献[14]中通过线性粒子群优化算法求解等效因子,构建关于公交站点和SOC的等效因子map图,通过线上查表获取实时等效因子,最终获得最优的能量分配。文献[15]中分析了驾驶员驾驶习惯对油耗的影响,把驾驶习惯分成6个等级,基于驾驶习惯构建了等效因子。文献[16]中采用伪谱优化算法求解等效因子,设计了自适应能量管理策略。
以上文献中的各种方法都显示了较好的燃油经济性,然而每种研究方法只是在特定的环境下或只考虑了单工况或部分工况下执行的,缺乏通用性。一些文献采用射击算法求解协调变量,但对其初值的范围没有详细的说明,如果初值选取不当,会大大增加计算时间,最终影响算法的执行。面对以上问题,本文中针对一款插电式混合动力客车,设计了基于等效因子优化的能量管理策略。首先提出了一种改进的射击算法,能快速获得等效因子的初值;随后提出了一种基于SOC下降的自适应等效燃油消耗控制策略(A-ECMS);最后通过仿真验证了所提出策略的有效性。
1 动力系统与数学模型
1.1 动力系统结构
PHEB动力系统结构如图1所示,在这种结构中,发动机和电机既可分别单独驱动车辆,也可混合驱动车辆,且兼备制动能量回收功能。车辆的主要参数如表1所示。
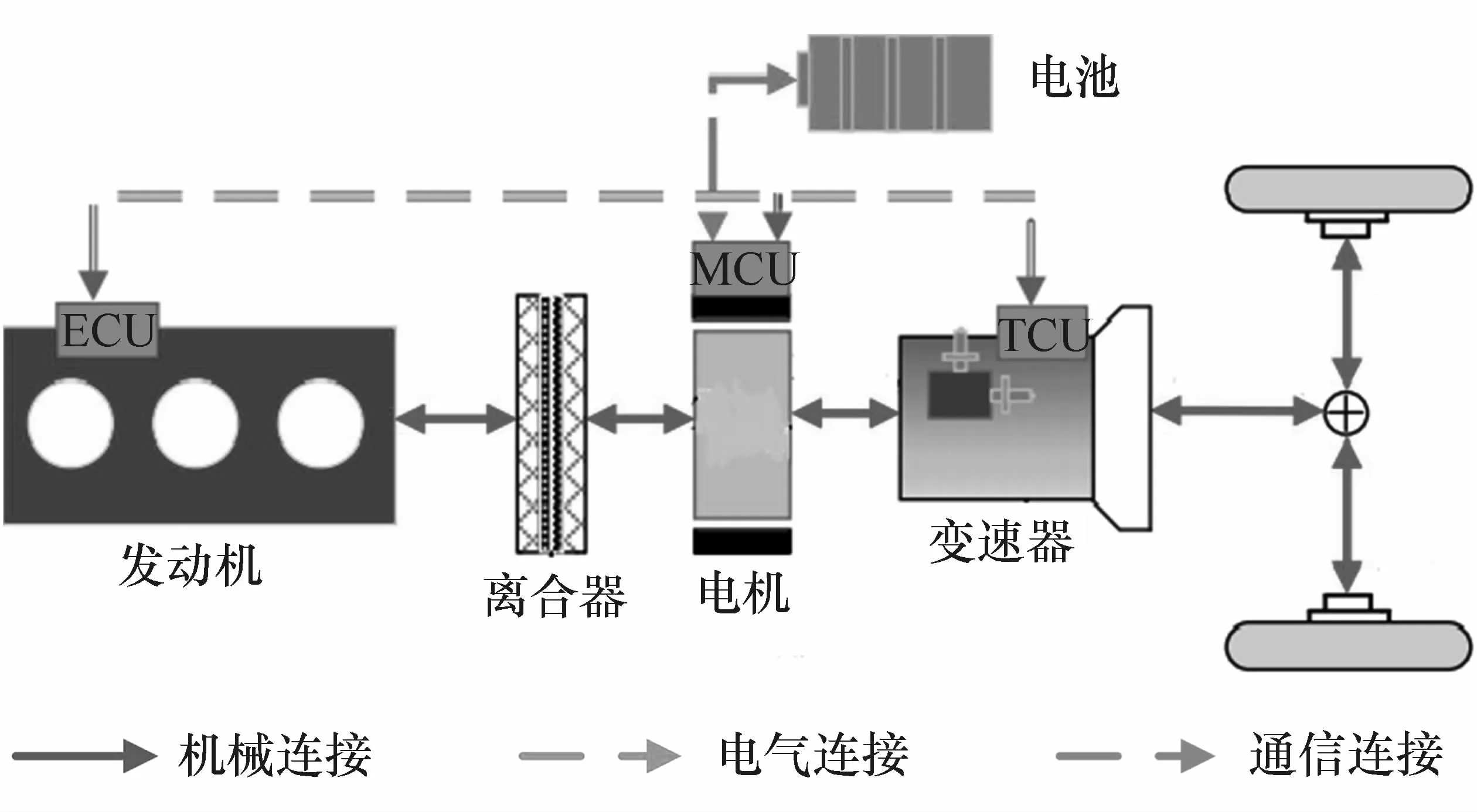
图1 PHEB动力系统结构图
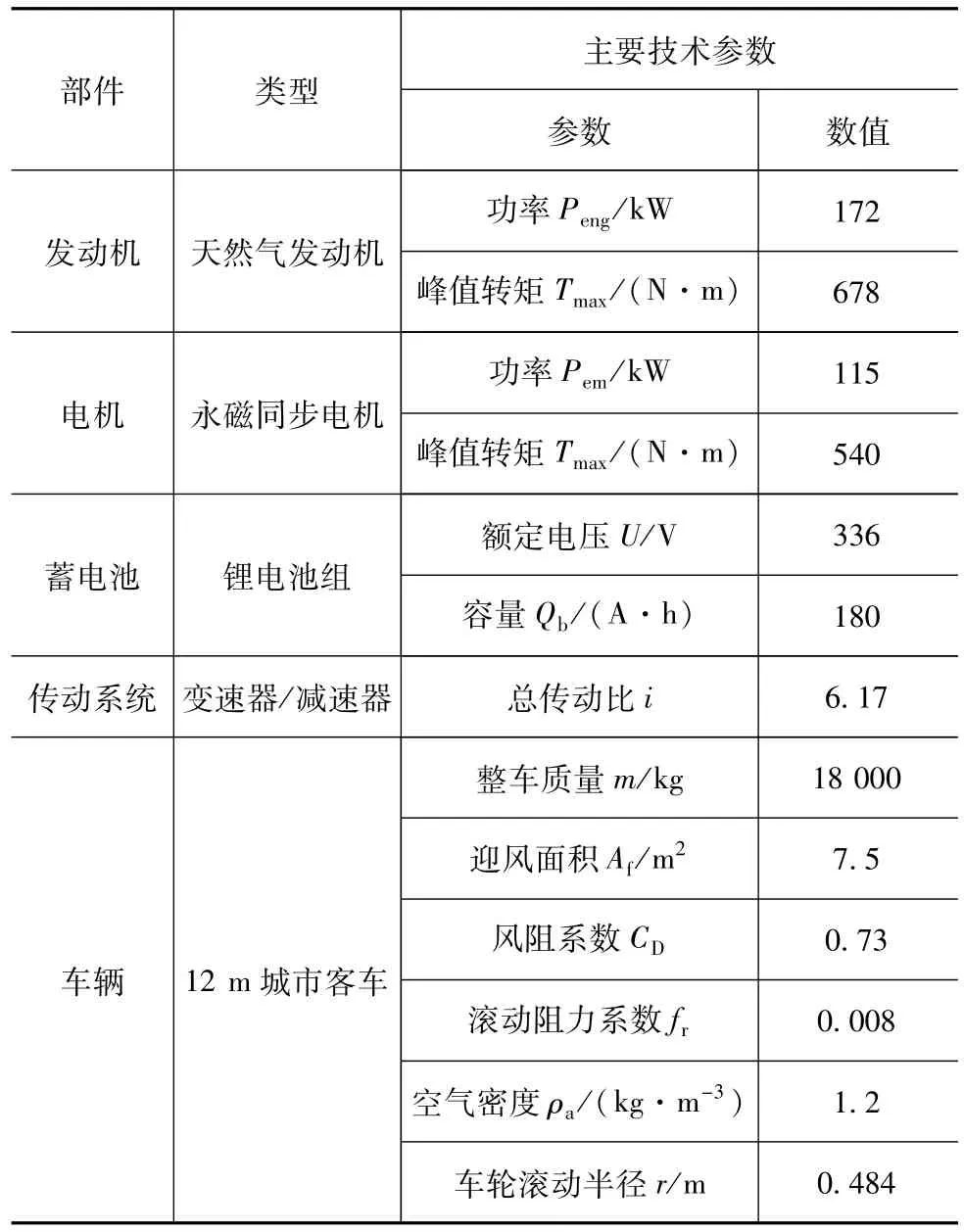
表1 PHEB主要部件及参数
1.2 车辆纵向动力学模型
根据车辆行驶过程中的动力学平衡关系,作用在车轮上的转矩Tw可表示为

式中:m为整车质量;g为重力加速度;fr为滚动阻力系数;ρa为空气密度;CD为风阻系数;Af为车辆迎风面积;α为坡道角度;vrv为车辆行驶速度;r为车轮半径。
车轮转矩Tw和发动机转矩以及电机转矩之间的关系为

式中:ηt为传递效率;iAMT为变速器传动比;if为减速器传动比;Te为发动机转矩;Tm为电机转矩;Tb为制动转矩。
1.3 发动机模型
天然气发动机采用准静态模型,每个时刻下的油耗可通过查发动机的燃油消耗曲线得到:
式中:m·f为天然气消耗量;ωe为发动机转速;ρ为天然气密度;be为燃油消耗率,可根据图2中的发动机转速和转矩获得。
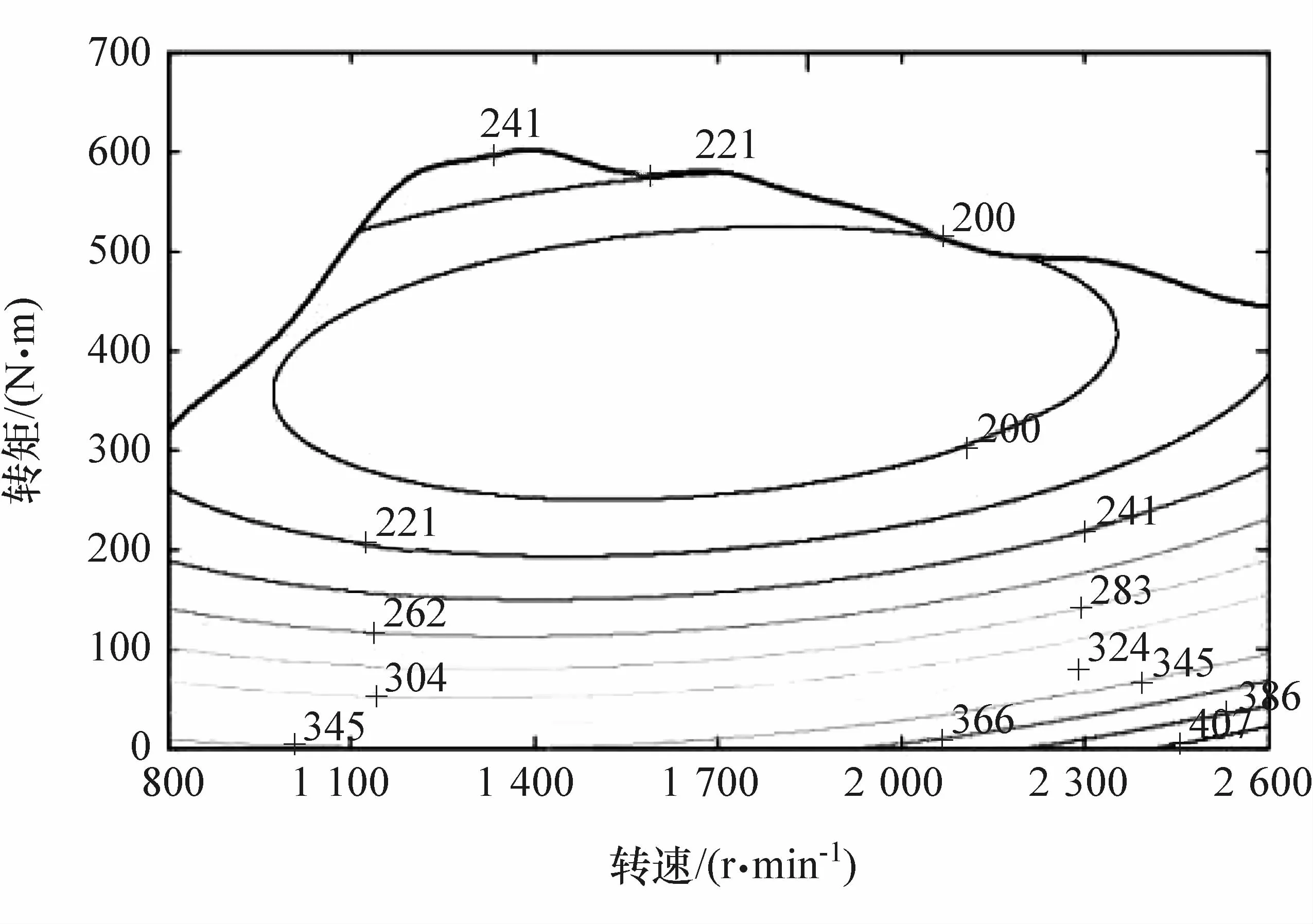
图2 天然气发动机万有特性图
1.4 电机模型
电机选用永磁同步电机,在工作过程中既可作为牵引电机提供转矩,也可作为发电机给电池充电,因此电机的功率Pm可表示为
式中:ωm为电机转速;ηem为电机作为驱动电机时的效率;ηge为电机作为发电机时的效率。ηem和ηge可以通过查询图3获取。图3为电机效率特性图。
1.5 电池模型
忽略温度对电池的影响,采用Rint模型[17]对电池建模,获得电池SOC和输出功率表达式为
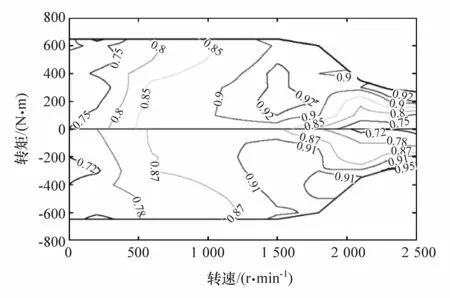
图3 电机效率特性图
2 自适应能量管理策略
2.1 问题描述
以最佳燃油经济性为优化目标,性能泛函为

式中:u(t)为控制变量;m·fuel为瞬时燃油消耗率;[t0,tf]为优化时域。针对 PHEB,其控制变量为 x(t)=SOC(t),状态变量为 u(t)=Te(t)。
上述最优控制问题的汉密尔顿函数为

式中:λ为协调变量;H为汉密尔顿函数值。
根据极小值原理,最优控制输入通过求解汉密尔顿函数的最小值得到:

ECMS由极小值原理推导而来,其等效油耗meqv由实际油耗mfuel和与电能相对应的名义油耗me两部分构成,相应的瞬时消耗率亦然:
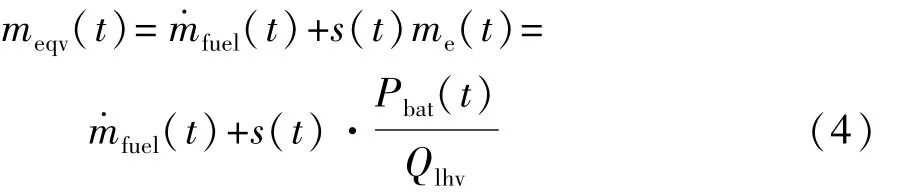
式中:s(t)为等效燃油消耗因子,简称等效因子;Qlhv为天然气低热值。
对比式(2)和式(4)得到协调变量和等效因子之间的对应关系为

2.2 等效因子计算
为使ECMS控制策略得到较好的经济性能,等效因子的求解尤为关键。目前文献中大都采用射击算法求解,但采用射击算法求解等效因子难点在于对其初始值范围的合理猜测[18]。为解决上述问题,本文中提出了一种改进的射击算法,先根据车辆的动力参数确定初值范围,然后再求其精确值。
2.2.1 等效因子下限
由能量守恒定律可知:

式中:Efuel和Ebat分别为整个行程过程中消耗的燃油能量和电池能量;Ed和Eloss分别为完成行程需求的能量和损失的能量。
在整个驾驶循环过程中,为减少能量消耗,使能量损失最小,即
从上面的推论可知,若SOC未超过其限值,则最优等效因子为1。然而,在实际推导过程中未考虑SOC的限制,所以计算的值不一定适合。同时,仿真计算发现,当s(t)=1时,电池SOC快速达到其最低限值,当s(t)<1时,电池的放电率更大,几乎和纯电模式相当,其瞬时燃油经济性不再最优。因此,为获得最优的等效因子,其值应大于等于1,即

2.2.2 等效因子上限
PHEB有5种工作模式,可以用控制空间U来表示:
U={ufom}∪{ubom}∪{uhm}∪{ucm}∪{ubm}
式中:ufom代表发动机单独驱动模式;ubom代表电机单独驱动模式;uhm代表混合驱动模式;ucm代表行车充电模式;ubm代表制动能量回收模式。
假设在某个时刻Pd>0,且电池SOC达到最大限值SOCh,即SOC=SOCh,此时 ECMS需要找到最优的控制模式u*以减小成本函数。于是有

如果s的值太大,u*更趋向于{ufuel},当 s的值无限大,车辆将一直工作在发动机单独工作模式。很显然,太大的s值,不会得到最优的解。因此,电机单独驱动模式或混合驱动模式都有可能使系统能量消耗最低,即
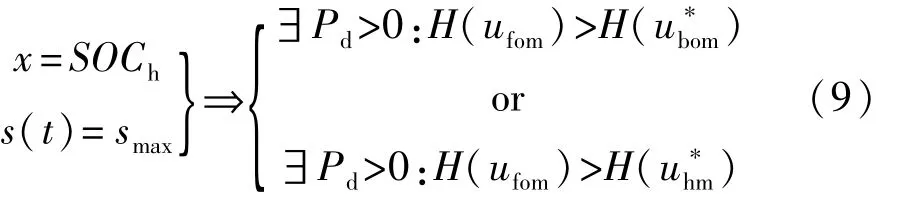
为计算最大值smax,式(9)将产生两个限值:smax1和smax2,则等效因子的上限为
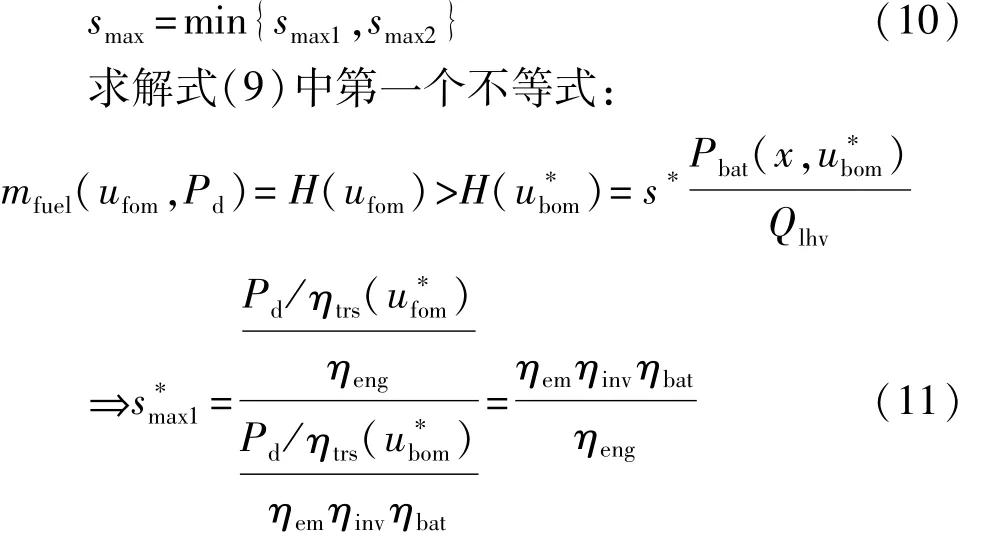
式中 ηeng、ηem、ηinv、ηbat分别为发动机、电机、电机控制器和电池的效率。
由于式(9)中的第2个不等式相关参数不能消去,故不能确定具体的数值。好在最优的等效因子只须满足式(9)中任一不等式即可。因此,本文选择的值作为最优协调变量的上限。对的值进行简化,用平均效率来代替实际效率,于是得到最优协调变量的上限为

结合式(8)和式(12),最优等效因子的界限为

2.2.3 算法流程
基于上述等效因子的取值范围,再结合传统的射击算法,可快速求出等效因子的初值,具体计算过程如图4所示。
2.3 控制策略的在线实现
标准的ECMS,等效燃油因子是固定值,不能随环境变化而改变。而实际上s与工况的关系非常紧密。针对某一个工况计算得到的s在该工况下能实现SOC的有效维持,但在其他工况下,SOC的轨迹可能会失控,完全偏离其正常工作范围。
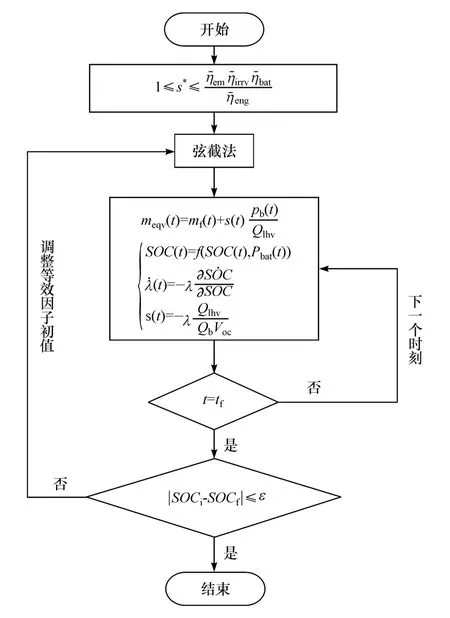
图4 等效因子求解流程图
为获得最小的等效燃油消耗,有必要使等效因子随着工况的变化而变化。因此,本文中采用一个PI控制器对等效因子的值进行实时更新,以保证实际SOC轨迹能实时跟踪参考SOC轨迹:
式中:s(0)为等效因子的初始值,采用改进的射击算法求得;kp和ki分别为PI控制器的比例常数和积分常数;SOC0、SOCf分别为SOC的初始值和终了值;D为出发地到目的地之间的总距离;d(k)为从初始时刻到当前时刻的累积行驶距离。
基于以上分析,所提出的基于等效因子优化的PHEB自适应能量管理策略总体结构如图5所示,具体实施步骤如下:
(1)利用改进的射击算法求解初始等效因子s(0);
(2)利用车载GPS,获取车辆当前时刻位置d(k),利用 PI控制器对等效因子 s(k)的值进行实时更新,使实际 SOC轨迹能实时跟踪参考 SOC轨迹;
(3)利用ECMS计算最优控制变量。
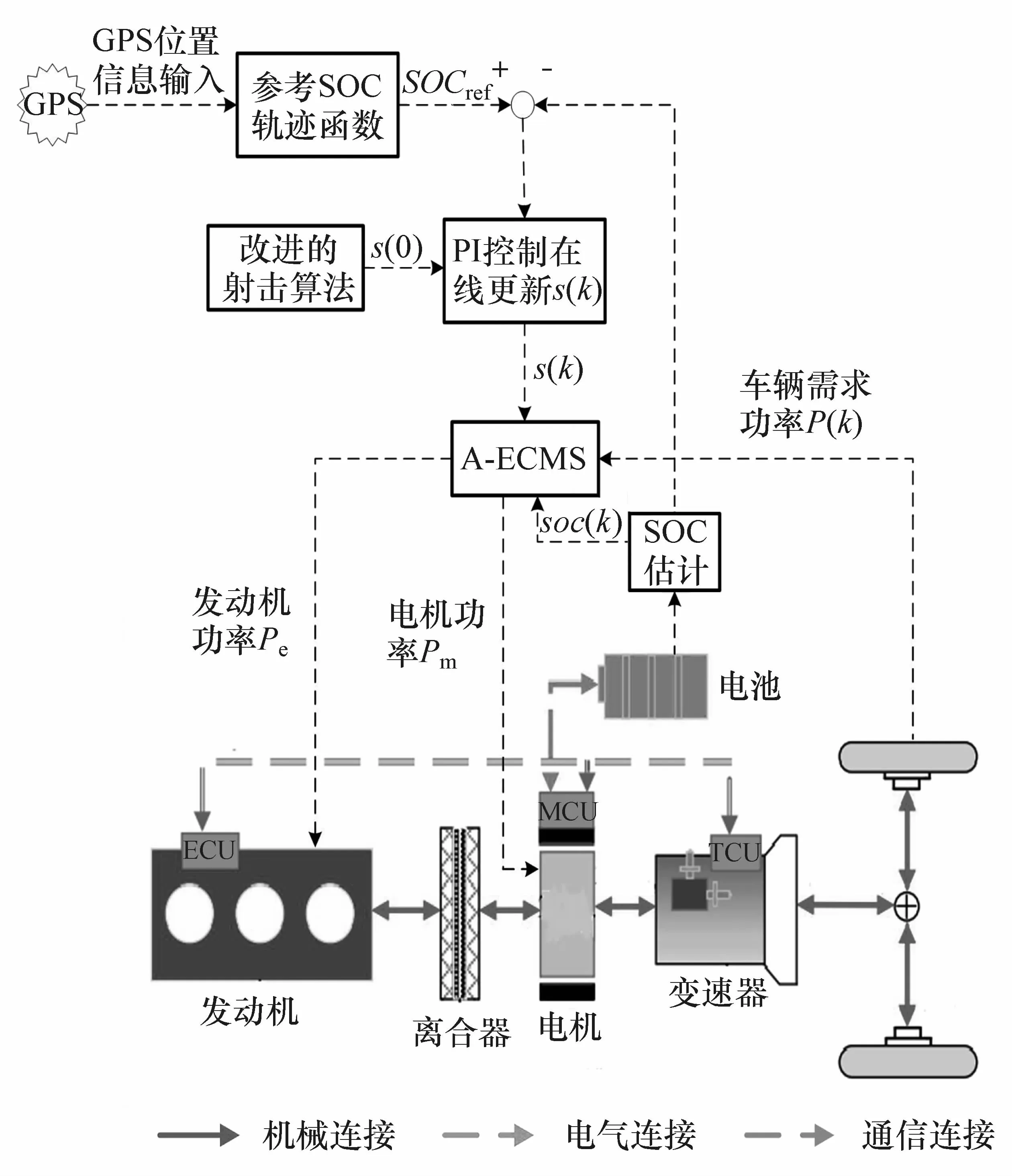
图5 在线实时能量管理策略总体结构
3 验证和讨论
3.1 性能验证
为验证本文中提出控制策略的有效性,在北京典型城市公交工况下对其进行仿真。在仿真中,将30次驾驶循环工况作为输入工况。初始SOC设为100%,终了SOC设为30%。仿真结果如图6和图7所示。图6显示了基本的仿真结果,包括车辆速度、电池SOC曲线、发动机和电机输出功率。从图中可以看出,SOC在整个行驶里程中稳定下降,在行驶终点时为 0.3。
由于整体的运行数据较多,不宜于观察,截取电池SOC为0.7左右的一个驾驶循环工况进行说明。由图7(a)可见,仿真车速可以达到车速跟随的需求。由图7(b)可见,电池SOC随着工况的运行持续减少,起始状态时SOC=0.7,到达工况终点时SOC=0.678,基本符合能量消耗过程的趋势要求。由图7(c)可见,等效因子随着驾驶环境的变化而改变。由图7(d)可见,发动机和电机输出转矩能够满足整车能量需求。
3.2 燃油经济性分析
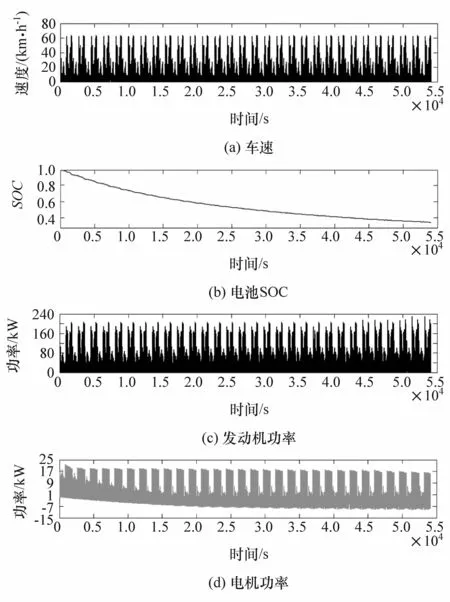
图6 PHEV实时预测控制策略的总体仿真结果
为评价所提出的控制策略的经济性,分别选用基于规则的控制策略、标准的ECMS策略和动态规划控制策略(DP)进行对比。仿真工况选用北京城市公交工况,电池的SOC初值和终值分别设为0.9和0.3,4种算法的SOC曲线见图8。图9为ECMS和A-ECMS两种控制策略的等效因子。由图8可见,基于规则控制策略下,车辆刚开始纯电动行驶,SOC下降速度较快,在2.5 h到达电池SOC最低限值,随后SOC维持在0.25~0.35之间波动。对于标准的 ECMS,由于其等效因子是固定值(s=3.2,见图9),不随工况的变化而改变,其SOC曲线变化幅度较大,偏离最优SOC轨迹。而本文提出的A-ECMS控制策略下的SOC曲线基本上与DP控制下的SOC曲线保持一致,这是由于PI控制器在实时更新s(t)的值。由图9可见,当SOC减小时,s(t)随之减小,以促进SOC的增加,反之亦然。
为验证本文所提出的控制策略对不同工况的适应性,除上述的北京城市公交工况外,还对另外两种工况进行研究,即中国典型城市工况和NEDC工况。
由于不同控制策略下的终了SOC不一样,无法直接对车辆的油耗进行客观合理的评价。为公平地评价4种控制策略燃油经济性的优劣,首先对终了SOC的影响进行修正。通过计算每种策略和最优策略之间的相对耗气量来评价油耗效率。
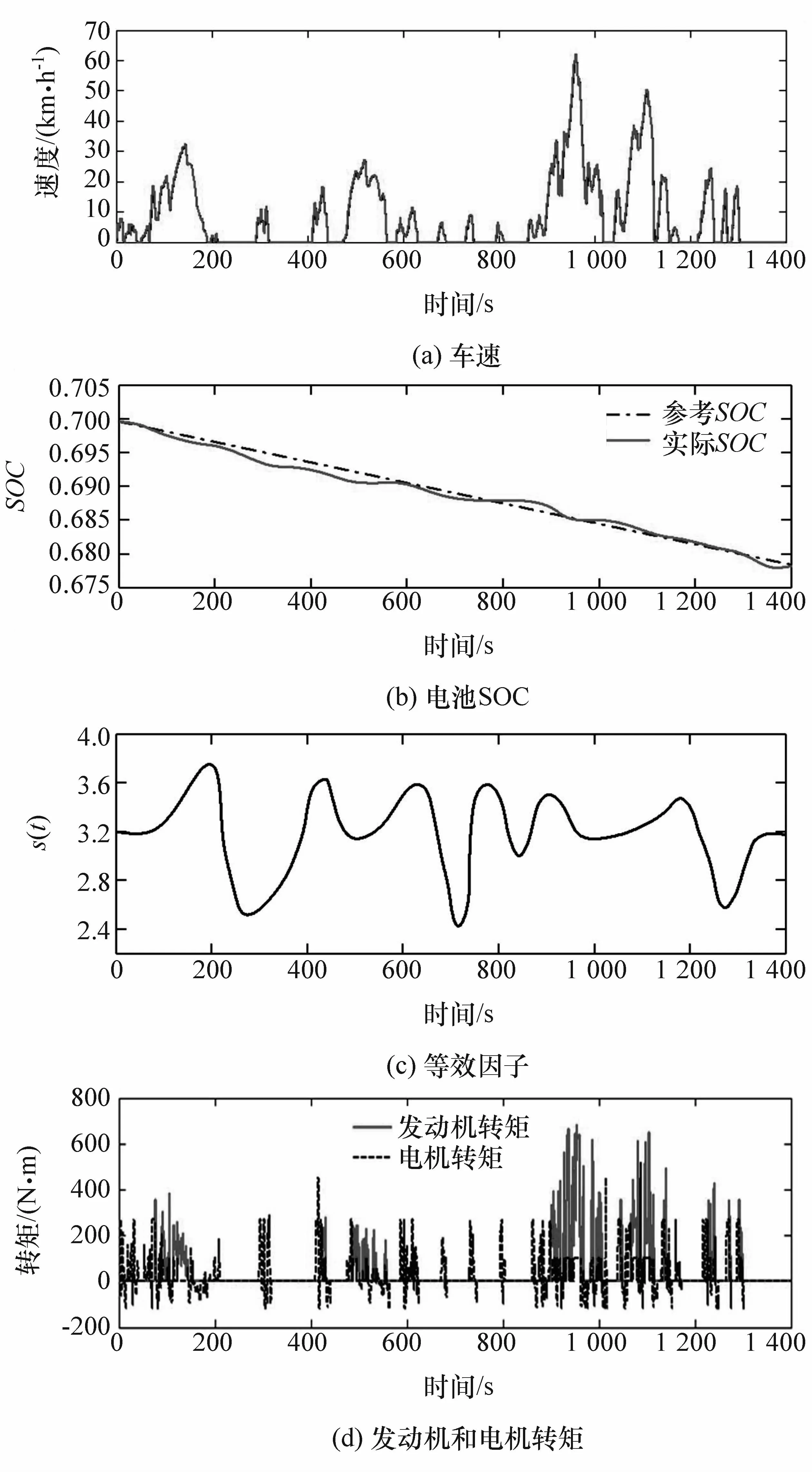
图7 选取单个驾驶循环工况的仿真结果
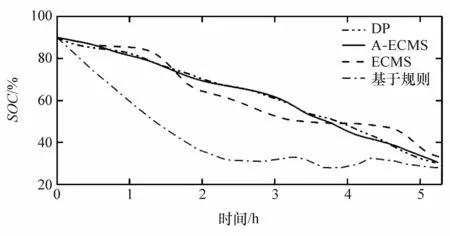
图8 4种控制策略的SOC曲线
式中:FC为天然气发动机燃油消耗;FCopt为根据每种策略的终了SOC值,利用DP获得的最优燃油消耗。η值越小,说明该控制策略的经济性越好。
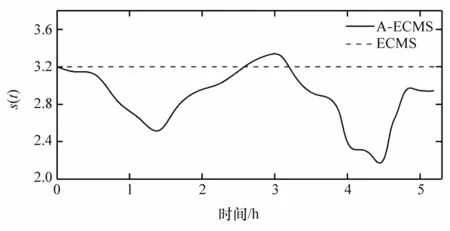
图9 等效因子曲线
表2给出了终了SOC修正后3种工况下不同控制策略之间的100 km油耗比较。可以看到,不论哪种工况,本文所提出的控制策略与离线最优值最接近,最大差异出现在北京城市公交工况下,只有4.2%;ECMS策略次之,基于规则的控制策略燃油经济性最差,在北京城市公交工况下,其油耗比最优值高14.1%。而A-ECMS控制策略的燃油经济性之所以比标准的ECMS好,是由于PI控制器实时更新s(t)的值,使整车的能量分配更加合理。
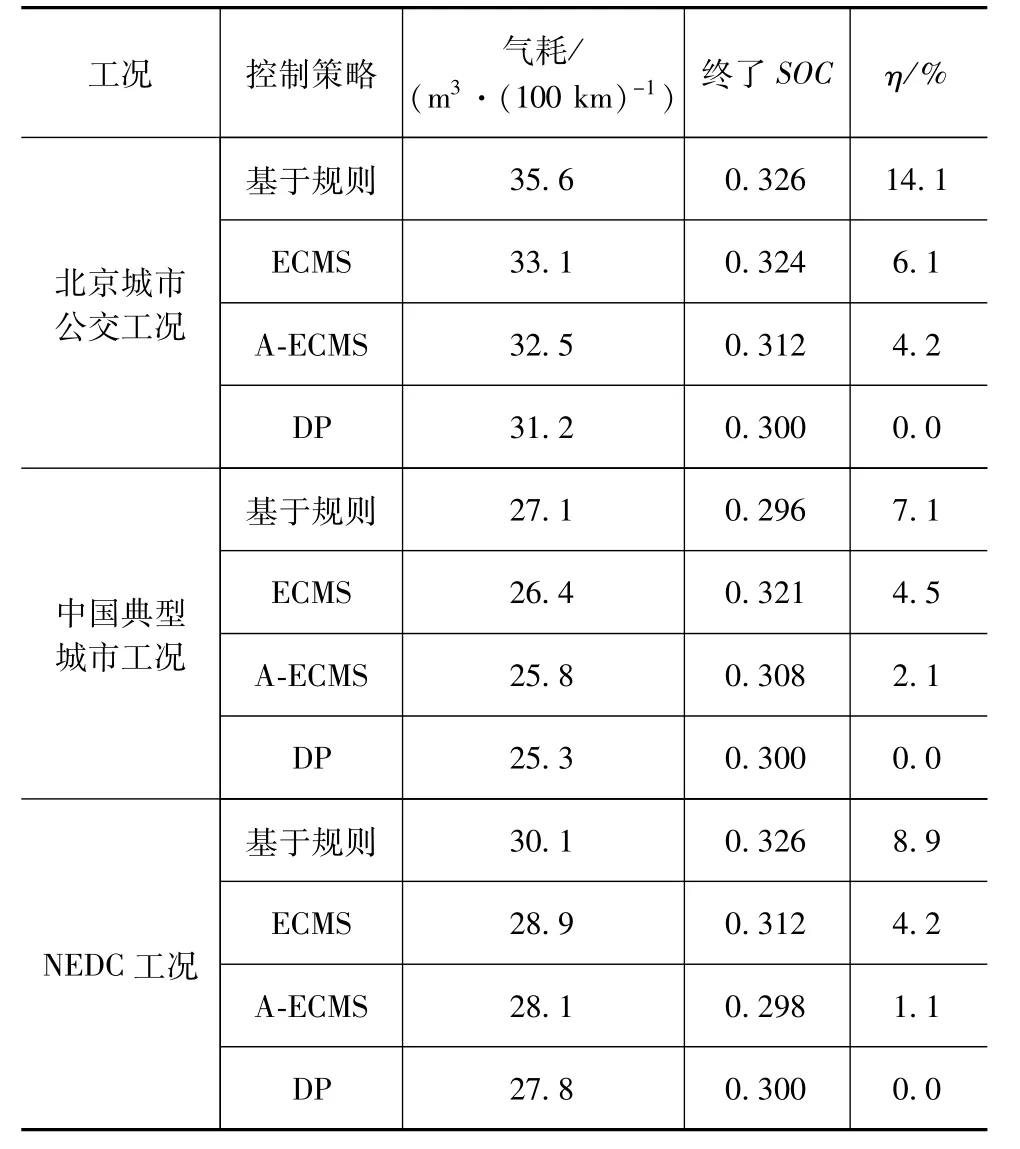
表2 不同控制策略的燃油经济性比较
4 结论
综合城市客车运行的特点,考虑整车经济性,提出基于等效因子优化的PHEB实时预测能量管理策略,并通过仿真对提出的策略进行验证,得出结论如下。
(1)所提出的改进射击算法,能提前确定等效因子的取值范围,快速计算等效因子初值。此外,所设计的基于SOC线性下降的在线优化能量管理策略,通过在线更新等效因子s(t),利用车载GPS提供的车辆位置信息,控制发动机和电机之间的功率分配,实现整个行驶过程中实际SOC对参考SOC的实时跟踪。
(2)通过仿真验证了所设计控制策略的有效性。并与基于规则的控制策略和标准的ECMS控制策略进行了详细比较,结果表明:无论是在燃油经济性上还是在SOC控制的鲁棒性上,本文所提出的策略都具有最好的控制效果。
