油井工况智能监测与风险防控技术研究
2020-04-01王勇
王 勇
(北京交通大学国家经济安全研究院,北京 100044)
有杆抽油是采油中最常用的方法[1],实时监控抽油机的工作状态对于避免低效生产、防控生产隐患具有重要意义[2-4],其中工况诊断是其中重要的内容之一,而工况诊断主要利用抽油井的示功图进行[5]. 近年来,随着油田信息化建设的不断完善,在井内安装了实时传感器,传感器按照一定的频率进行数据采集,实现示功图实时测量、数据实时采集,形成了庞大的数据量. 传统的示功图识别方法无法实时处理如此大的工作量,同时现场工程师的经验和知识会影响到识别的准确性[6-8]. 随着智能技术的发展,示功图的自动识别方法逐渐形成,例如决策树法[9]、灰色关联分析法[10]、模式识别法[11]等,但这些方法精度较低[12]. 为了解决这些问题,引入了卷积神经网络模型,进而利用监督误差反向传播算法对基于卷积神经网络模型的示功图识别模型进行了训练和测试,实现工况的智能监测与风险防范.
1 卷积神经网络
1.1 卷积神经网络结构
人工神经网络[13-15]是近年来热度较高的智能方法之一,在多个领域得到了广泛应用,其中卷积神经网络[16](Convolutional Neural Networks,CNN)由于处理速度快、精度高,应用更为广泛. 卷积神经网络是一种前馈人工神经网络,通过模拟动物视觉皮层组织建立神经元的连接模式,实现了多层感知器的变异,从而避免了显式特征的提取过程,大大提高了视觉识别的准确性,目前CNN已在图像和视频识别[17]、推荐系统[18]和自然语言处理[19]等方面实现了广泛的应用. CNN结构包括多个特征提取阶段和一个分类器,且特征提取阶段包括卷积层和下采样层,其工作原理为:在每个特征提取阶段,通过卷积运算输出更高层次的特征,并作为下一特征提取阶段的输入,直到最后一个特征提取阶段,并将最后一个特征提取阶段得到的输出作为分类器的输入,进而实现识别与分类.
1.2 卷积神经网络训练
CNN通过学习得到输入和输出之间的映射关系,且通过设置网络权值来体现这种映射关系,从而将逐层提取输入数据特征的能力赋予CNN. 笔者基于监督误差反向传播算法对CNN网络进行了学习训练,设置系统误差函数为输出误差的平方和,在训练过程中,将误差的计算结果不断反向传回,对应更新网络权值,CNN进行重新学习,直到系统误差满足要求. 整个训练过程包括正向传播输入信号和反向传播计算误差两个过程. 正向传播时,CNN的输入层直接获取样本图像数据,根据网络权值逐层提取数据特征并通过中间隐藏层转换输出到输出层. 反向传播时,计算原始样本结果与正向传播输出之间的误差,并通过反向传播算法调整整个网络的权重,以获得最佳性能. CNN的详细流程如下.
1.2.1 正向传播
1)从训练集中抽取一个样本,并将样本数据输入CNN.
2)首先进行卷积运算、下采样运算和分类器正向传播输入的样本数据,计算得到实际输出,见公式(1).

式中:x为样本数据;y为输出;tan h表示双曲正切激活函数;bij表示特征映射的偏差参数;oij表示特征映射;r和c表示样本的行数和列数;gij表示特征图oij的增益参数;Ni表示第i层的次采样率.
1.2.2 反向传播
S1P与其受体的相互作用在脓毒症早期可增强固有免疫并抑制适应性免疫反应,促进病原体清除,减轻脓毒症早期的炎症反应,减少组织和器官损伤,提高患者生存率。然而,在脓毒症晚期免疫抑制阶段,S1P持续减弱适应性免疫反应可导致二重感染的概率升高。
1)设置系统误差函数为输出误差的平方和,计算实际输出和理想输出之间的误差和;

式中:J为误差和.
2)将误差的计算结果反向传回CNN,对应更新网络权值.

式中:α 为反向学习速率.
实际应用过程中,通常采用批量训练技术进行网络的训练,在给出多个输入和目标后更新权重和偏差.
2 油井工况智能监测与风险防控方法
CNN在图像识别中的优势可以很好地在示功图的识别过程中发挥,图1为基于CNN的示功图识别流程图,包括数据采集、数据处理、结果输出三个过程.
2.1 示功图标准化
为了缩短训练时间,提高学习的收敛速度,有必要对网络输入数据进行标准化. 将原始的指标图作为CNN 的输入,预处理成归一化的二值图像. 该模型将抽油机的位移矢量S和载荷矢量F绘制成64×64的二值图像. 该图使用位移矢量作为x轴,界限设置为[min(S),max(S)];使用载荷矢量作为y轴,界限设置为[min(F),max(F)].
2.2 CNN输出设置
CNN 输出层的神经元数量等于定义的工况数量. 当向CNN输入一个示功图时,输出层中只有一个神经元获得值1,剩余的神经元输出为0. CNN 的理想输出模式如表1所示.
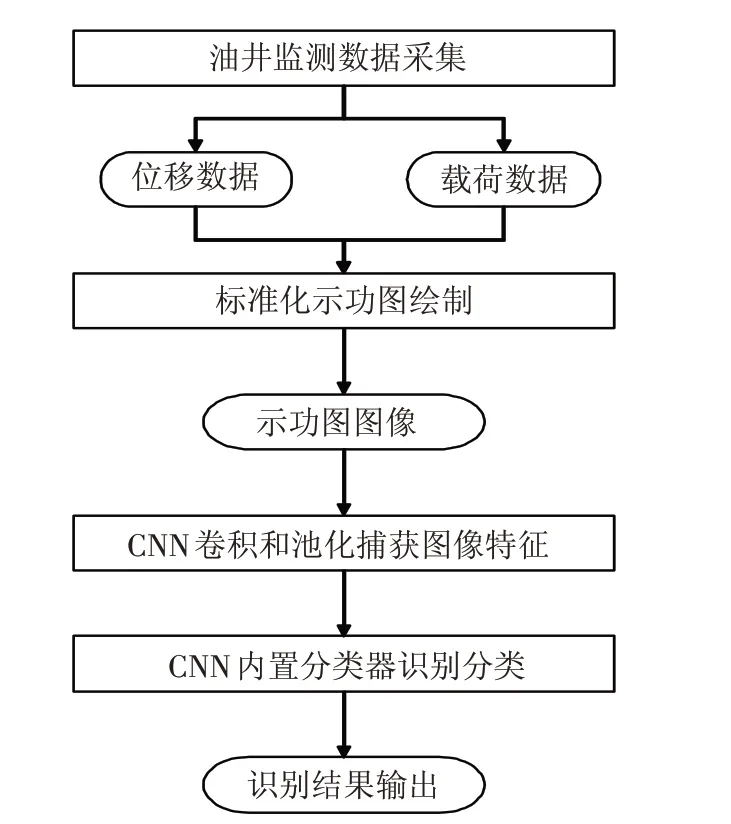
图1 基于CNN的示功图识别过程Fig.1 Dynamometer recognition process based on CNN
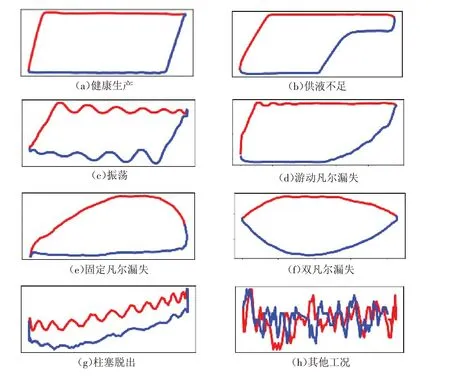
图2 典型示功图Fig.2 Typical dynamometer diagram

表1 CNN 模型的理想输出模式Tab.1 Ideal output mode of CNN model
2.3 模型网格描述
本文采用的CNN指标图识别模型的结构为LeNet-5[20]. LeNet-5包含两个特征提取阶段和一个神经网络分类器,见图3.
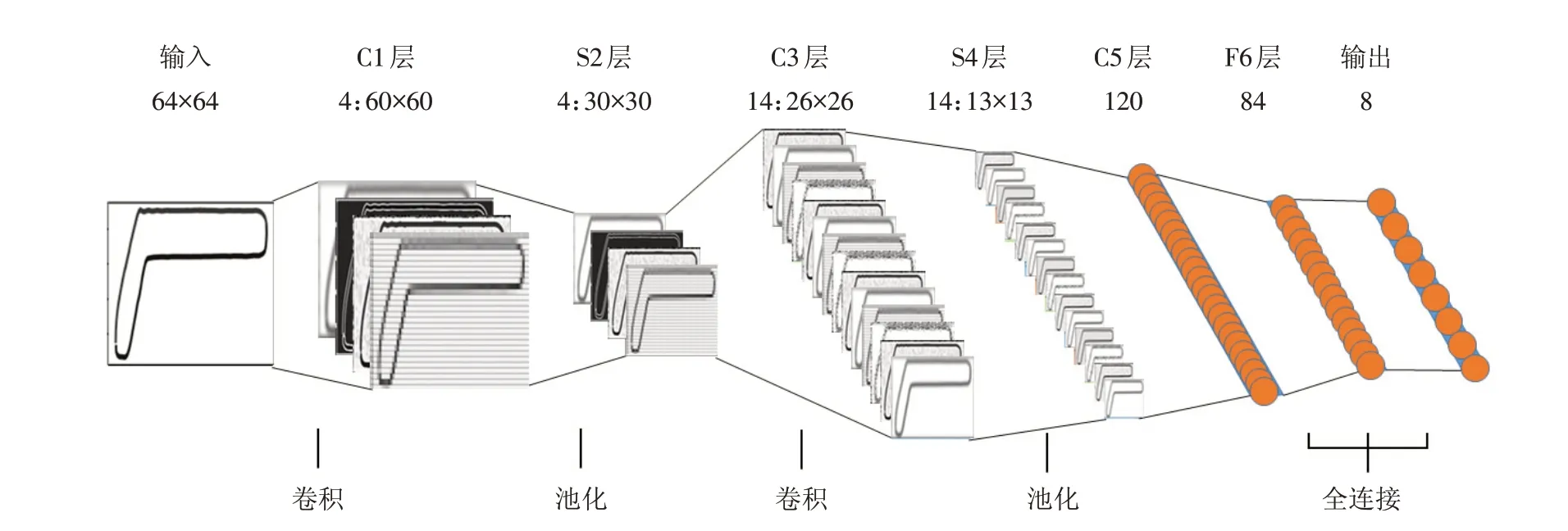
图3 具有两个特征提取阶段的CNN典型结构Fig.3 Typical CNN structure with two feature extraction stages
本文设计将进行标准化后的64×64灰度图像作为CNN模型的输入,通过训练学习得到一个8×1列向量作为输出. CNN网络的第一个特征提取阶段包括卷积层C1和下采样层S2.
C1层通过4个5×5的卷积核对原始图像进行卷积得到. 这使得C1层包含4个60×60的特征图. 在C1层中,原始图像和每个特征图之间有1个5×5的卷积核和1个偏差. 需要训练的重量数为4×(5×5+1)=104.
在C1层的特征图上,通过一对一的下采样操作得到S2层. 下采样分辨率设置为2×2. 因此,S2层中的特征图尺寸为30×30,特征图的数量为4. 每个下采样操作都包含两个训练参数,即乘法偏差和加法偏差.S2层的重量为4×(1+1)=8.
CNN网络的第二个特征提取阶段包括卷积层C3和次采样层S4. 卷积层C3共计14个卷积核的大小为5×5的特征映射,其分辨率为26×26. 每一个特征映射都与S2层的映射连接. 这样的连接在减少了C3和S2层之间的连接数量的同时破坏网络连接的对称性. C3层和S2层之间的连接见图4所示,图中数字代表C3和S2层所包含的网络映射. C3层所需权重数量为5×5×14+14×1=364.
由于下采样层S4的下采样分辨率仍为2×2,因此输出的结果为14个13×13的特征图. 另外,每一个下采样操作通过调整两个训练参数实现,故S4层的权重数量为14×2=28.
C5层是卷积层,每个特征映射都连接到S4层的所有特征映射. 这种连接类型通常称为完全连接. C5层包含120个1×1的特征图,也可以看作是120维的列向量. 该层的卷积核大小为13×13. S4 层与C5 层连接数量为120×(13×13×14+1)=284 040,即权重数量为284 040.
F6 层是1 个包含84 个节点的BP 神经网络的隐层. 该层权重数量为84×(120+1)=10 164.
输出层包含8 个节点,得到1×8 的输出列向量,矢量中最大值元素的位置对应于网络的分类结果.
2.4 实验结果
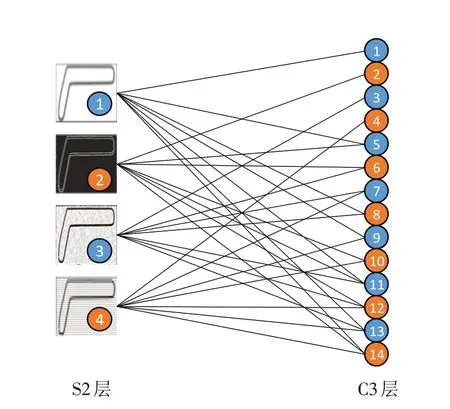
图4 C3层与S2层的连接Fig.4 Connection between C3 and S2
利用从实际油田采集的示功图集,对所提出的CNN 模型进行了训练,从而验证模型的有效性. 数据集包括70口井的超过120 000张示功图. 对示功图均采用人工标识方式进行标识为8类,形成包含32 000张示功图的训练集. 针对每种工况随机抽取80%作为训练集,其余作为测试集. 训练示功图总数25 600张,测试示功图总数6400张. 每种工作条件下的样品数量如图5所示.
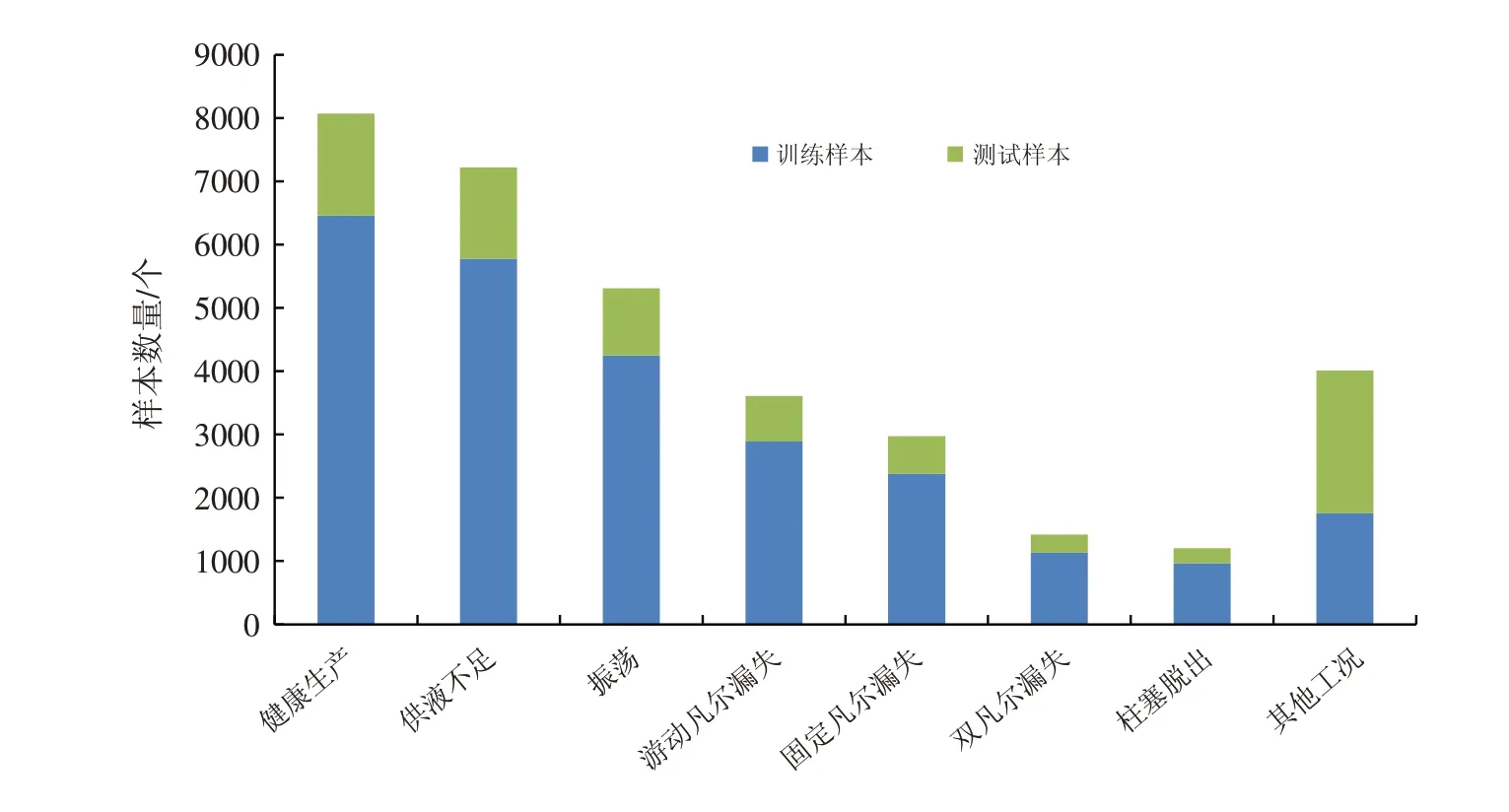
图5 实验样本分布图Fig.5 Distribution of experimental samples
在训练CNN模型之前,需要确定相关参数,具体包括学习率η和训练次数s. 对于学习率η,过大的训练率可能导致训练过程不稳定,过小的训练率会减慢训练的收敛速度,使训练周期过长,容易陷入局部最优.对于训练次数s,应仔细确定训练次数,以确保CNN得到充分的训练,同时不会过拟合. 根据前人的研究工作,本文模型选择了学习率η=0.5,训练次数s=20.
本文CNN模型训练时间为5126 s,训练过程完成后,用测试样本和训练样本验证模型的识别精度,结果表明,训练样本的识别误差为1.53%,测试样本的识别误差为1.75%,基于CNN的示功图识别模型的准确度达到95%以上. CNN模型识别示功图所需的平均时间仅为2.3 ms. 从结果可以看出,CNN模型的性能优越.基于CNN的示功图分类识别模型可以将油井实时采集的数据进行分析评价,实时智能监控油井运行状况,提出风险预警,大大增强了规避风险的概率.
3 实际应用效果
基于本文提出的方法,以国内某油田为应用对象,搜集了该油田近200万组油井生产监测数据,对该数据进行整理、清洗等前期预处理工作后绘制了相应的示功图图片,并从中筛选建立了包含30余种工况的训练集. 通过该训练集对本文提出的CNN网络进行训练,得到了针对该油田的油井工况智能分析神经网络,并形成了一套油井工况智能分析系统,实现从数据采集到风险管控的全过程.
利用基于CNN模型所建立的油井工况智能分析系统,对该油田的三个区块开展智能生产管理,2018年度应用情况表明:应用本系统后,采油系统效率总体提升2.67%,工况合格率提升11%,防范风险成功率提高60%.
4 结论
1)基于深度学习技术建立了一套油井工况智能监测与风险防控方法,实现了油井工况的自动评估、智能管理和防范风险的目标.
2)利用监督误差反向传播算法对基于卷积神经网络模型的示功图识别模型进行了训练和测试,实验结果表明,基于深度学习技术的示功图识别模型的准确度达到95%以上.
3)矿场应用后采油系统效率总体提升2.67%,工况合格率提升11%,防范风险成功率提高60%,具有一定的推广价值.
