长春市轨道交通?C?型列车停车/停放制动控制逻辑分析及改进措施
2020-03-30刘畅张燕萍左安国
刘畅 张燕萍 左安国
摘 要:长春市轨道交通 C 型第三期列车整车网络控制系统由 2 家制造商提供,并分别装载于不同生产批次的列车。不同制造商的网络控制系统执行逻辑略有差异,尤其停车制动、停放制动的控制逻辑差异导致列车运营及日常维护受到严重影响,文章针对这 2 种控制逻辑的差异进行分析,并提出改进措施。
关键词:城市轨道交通;制动控制;逻辑分析;改进措施
中图分类号:U270.35
长春市轨道交通C型第三期列车为70%低地板列车,由4动2拖编组组成,主要制动为电制动和机械制动,机械制动由液压制动及磁轨制动组成。从该型号列车开始运营至今,已超过10年,整车网络控制系统由A、B 2个不同制造商提供,其制动控制逻辑存在差异,尤其体现在停车制动及停放制动信号施加的控制逻辑上。
A制造商停车制动、停放制动缓解采用“与”逻辑,停车制动信号施加条件为无速度限制。B制造商停车制动、停放制动缓解采用“或”逻辑,停车制动施加条件为列车速度小于12 km/h时施加。
1 問题提出
经对安装有A、B 2个网络控制系统的列车停车/停放制动调查发现,安装A网络控制系统的列车,在线运营过程中多次出现非制动故障情况下的制动无法缓解现象及列车异常施加停车制动的情况,多次造成列车无法正常运行,严重影响线路运营计划。安装B网络控制系统的列车,则未发生此现象。
之后,车辆段对A制造商列车实际运行情况、列车监控记录数据进行分析,同时进行现场故障模拟,发现该异常类故障可100%复现,A制造商设计师对此予以了确认。随后车辆段分别与A、B 2个网络控制系统制造商进一步核实,最终确定是由于停车制动及停放制动分别采用了不同的控制逻辑所致。
2 停车/停放制动简介
2.1 停车制动
停车制动是指列车网络控制系统根据牵引逆变器发出的电动转换信号,将列车运行速度控制在5~1km/h范围的机械制动。当任何一个有效的电动转换信号转变为低电平信号时施加停车制动,否则列车处于停车制动缓解状态。
停车制动施加和缓解为逻辑控制,由网络控制系统对电动转换信号电平高低进行识别和逻辑判断后,向动力模块制动控制单元发出停车制动施加或缓解指令。动力模块制动控制单元接收的指令为高电平时制动缓解,低电平时制动施加。
2.2 停放制动
停放制动是指列车运行速度在1~0 km/h范围的机械制动。当满足制动等级SB、EB1、EB3、EB2中的任何一个且速度≤1 km/h时,则施加停放制动。停放制动施加后,只有在启车时才能缓解。
停放制动施加未采用逻辑控制,当网络控制系统判断列车处于制动状态且列车速度处于1~0 km/h范围时, 向动力模块制动控制单元发出停放制动施加指令;停放制动缓解为逻辑控制,由网络控制系统进行电动转换信号电平高低的识别和逻辑判断后,向动力模块制动控制单元发出相关指令。动力模块制动控制单元接收的指令为高电平时制动缓解,低电平时制动施加。
2.3 停车/停放制动电动转换信号
当牵引逆变器检测到列车处于牵引状态时,电动转换信号由低电平信号转变为高电平信号;当牵引逆变器检测到列车处于非牵引状态且列车速度≤5 km/h时,电动转换信号由高电平信号转变为低电平信号。
3 停车/停放制动控制逻辑
3.1 停车制动控制逻辑
3.1.1 停车制动施加控制逻辑
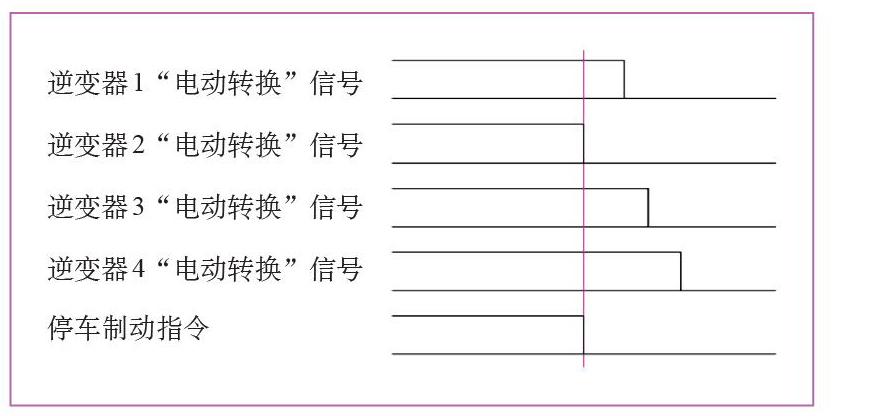
当网络控制系统检测到任意1台牵引逆变器发出的电动转换信号由高电平信号转变为低电平信号时,即满足“或”逻辑后(图1),网络控制系统向动力模块制动控制单元发出停车制动施加指令。
停车制动施加若采用“与”逻辑控制,则在电制动和机械制动切换过程中,可能会出现由于电动转换信号异常造成列车出现无法施加机械制动的情况,为避免此情况发生,A、B制造商均采用“或”逻辑控制。
3.1.2 停车制动缓解控制逻辑
(1)A制造商“与”逻辑控制。当同一列车中的4台牵引逆变器工作均正常,网络控制系统检测到4台牵引逆变器发出的电动转换信号同时为高电平信号时,即满足“与”逻辑后,网络控制系统向动力模块制动控制单元发出停车制动缓解指令(图2);当某台牵引逆变器工作不正常(网络控制系统检测到牵引工作正常信号及电制动工作正常信号中的任意1个或全部为低电平)时,网络控制系统将不检测该牵引逆变器的电动转换信号,而是通过剩余有效的电动转换信号进行“与”逻辑判断,网络控制系统并据此向动力模块制动控制单元发出停车制动缓解指令。
(2)B制造商“或”逻辑控制。当网络控制系统检测到任意1台牵引逆变器发出的电动转换信号为高电平信号时,即满足“或”逻辑后,网络控制系统向动力模块制动控制单元发出停车制动缓解指令(图3);当列车静止且处于停车制动施加状态时,在启动列车后,网络控制系统将自动向动力模块制动控制单元发出停放制动施加指令,随后通过停放制动缓解控制逻辑进行缓解。
3.2 停放制动控制逻辑
3.2.1 停放制动施加控制逻辑长春市轨道交通C型第三期列车停放制动施加未采用逻辑控制。
3.2.2 停放制动缓解控制逻辑
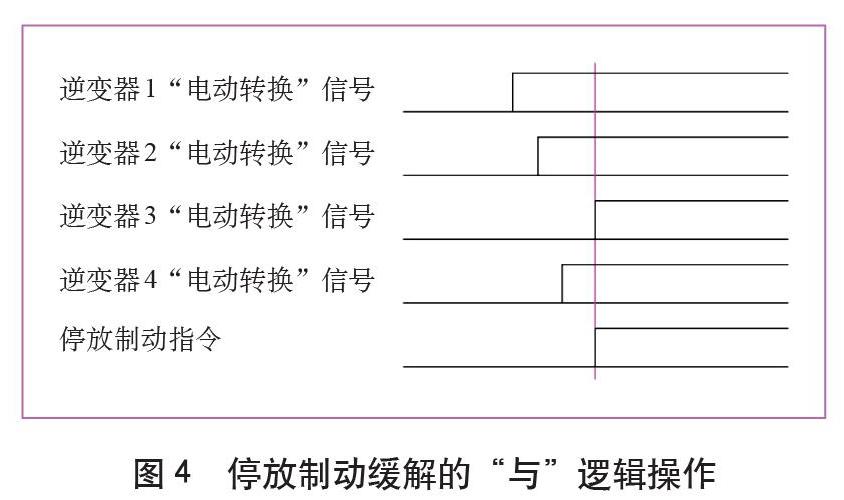
(1)A制造商“与”逻辑控制。当同一列车中的4台牵引逆变器工作均正常,网络控制系统检测到4台牵引逆变器发出的电动转换信号同时为高电平信号时,即满足“与”逻辑后,网络控制系统向动力模块制动控制单元发出停放制动缓解指令(图4);当某台牵引逆变器工作不正常(网络控制系统检测到牵引工作正常信号及电制动工作正常信号中的任意1个或全部为低电平)时,网络控制系统将不检测该牵引逆变器的电动转换信号,而是通过剩余有效的电动转换信号进行“与”逻辑判断,网络控制系统并据此向动力模块制动控制单元发出停放制动缓解指令。
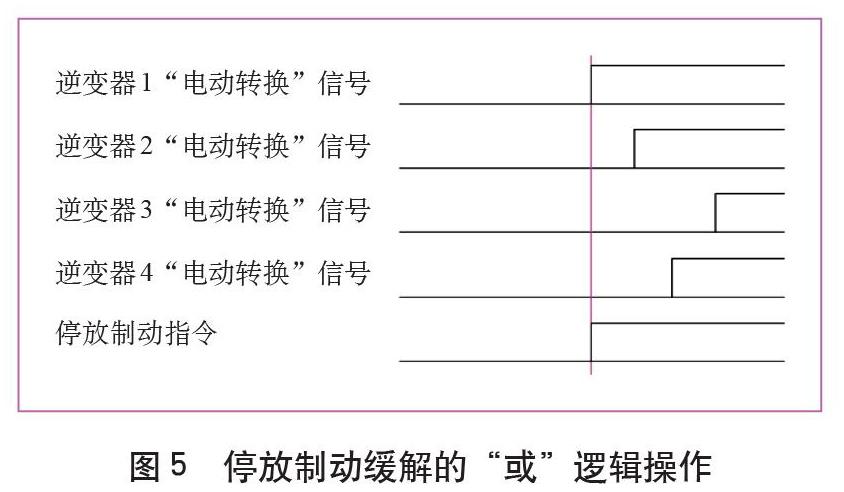
(2)B制造商“或”逻辑控制。当网络控制系统检测到任意1台牵引逆变器发出的电动转换信号为高电平信号时,即满足“或”逻辑后,网络控制系统向动力模块制动控制单元发出停放制动缓解指令(图5)。
4 停车/停放制动控制逻辑问题分析
4.1 停车制动施加控制逻辑与列车运行速度关系
4.1.1 停车制动施加无速度限制
A制造商针对停车制动施加未设置有速度限制条件,根据停车制动施加控制逻辑,当某个电动转换信号在任意速度下非预期撤销,即满足“或”逻辑状态,列车将在此速度下直接施加停车制动直至停车,此过程随着列车速度的提高,客伤、制动夹钳磨损、车轮磨损等情况发生的概率随之上升。
4.1.2停车制动施加有速度限制
B制造商针对停车制动施加设置有速度限制条件,一般设置为,列车行驶速度低于12km/h时,网络控制系统向动力模块制动控制单元发出停车制动施加指令。当某个电动转换信号在速度限制条件下非预期撤销,即满足“或”逻辑状态,列车将在此限制速度下施加停车制动直至停车,此过程不易导致客伤、制动夹钳磨损、车轮磨损等情况的发生。
4.2 电动转换信号控制板与停车/停放制动控制逻辑关系分析
电动转换信号由牵引逆变器控制板DI / DO的DO发出,DO点位常态为低电平,当满足预置条件后变为高电平;当控制板DI / DO故障或宕机时,该点位会保持低电平输出。
根据长春市轨道交通3号线线路情况,按照每列车每年运营11个月,每列车每日全线运营往返5次,线路共有车站33座计算,在理想状态(每站电动转换控制板DI / DO点位动作2次)下,控制板DI / DO点位每年在正线运营过程中的动作次数为11×30×10×33×2 = 217800次,考虑车辆段内试车、夜间调试等情况,该点位每年动作次数将不少于22万次。
一般情况下,电路板寿命为30年,但控制板DI / DO内部继电器在动作100万次后,出现不稳定(无动作/接触不良)的概率会上升,因此,在列车运营约5年后,DO输出的不稳定性升高,导致电动转换信号持续输出低电平的概率上升。而停车制动施加、停车制动缓解、停放制动缓解均需通过网络控制系统采集电动转换信号进行逻辑判断,若采用“与”逻辑控制,则列车出现非制动故障情况下的制动无法缓解的概率会随之提升。
4.3 停放制动缓解“与”“或”逻辑对比分析
(1)从安全性角度考虑,当某个牵引逆变器电动转换信号由于异常原因由低电平转变为高电平信号时,列车将会处于停放制动缓解状态,从而导致出现溜车的情况;在控制板DI / DO内继电器不稳定情况下,通常会出现无动作/接触不良以及无法排除的触点粘连故障现象,因此,从安全性角度考虑,“与”逻辑略优于“或”逻辑。
(2)从故障冗余角度考虑,如果单个控制板DI / DO因内部继电器无动作或接触不良导致无法发出电动转换信号的概率为A%,则“与”逻辑出现停车制动、停放制动无法缓解的概率为4×A%,“或”逻辑出现停车制动、停放制动无法缓解的概率为A%4,“或”逻辑出现问题的概率远小于“与”逻辑,因此,从故障冗余角度考虑,“或”逻辑优于“与”逻辑。
(3)从正线运营角度考虑,由于列车显示屏IDU中电动转换信号显示位置较为隐蔽,且网络控制系统无明确提示,导致列车驾驶员难以准确有效地判断故障点,因此,当列车出现停车制动、停放制动无法缓解,正线处理操作无效致使整车重启时,一般会导致列车不少于5 min的晚点或造成正线延误,影响正线运营。长春市轨道交通C型第三期列车运营至今采用“或”逻辑的列车未发生因控制板DI / DO内部继电器问题导致的溜车情况,表明“或”逻辑出现此问题的概率远低于“与”逻辑,因此,从正线运营角度考虑,“或”逻辑优于“与”逻辑。
5 改进措施
經与列车制造商反馈、分析、协调,目前列车制造商已要求A网络控制系统供应商,对所有涉及停放制动、停车制动信号施加控制逻辑问题的列车网络控制系统程序进行了更新,修改为停放制动、停车制动缓解采用“或”逻辑,停车制动施加条件改为列车速度小于12km/h时施加,最终停放制动、停车制动的控制逻辑问题得到了解决。
6 结论及建议
(1)停放制动、停车制动缓解采用“或”逻辑可有效规避采用“与”逻辑造成的列车正常运行中停放制动、停车制动无法缓解的情况。
(2)停车制动施加条件增加速度限制,可有效避免列车在高速运行中因某个电动转换信号出现异常,导致在非预期状态下施加停车制动所造成的客伤、制动夹钳磨损、车轮磨损等情况。
(3)通过长春市轨道交通C型第三期列车累计10年的运营经验,“或”逻辑完全可以满足城市轨道交通的运营要求。若必须采用“与”逻辑控制,则在电动转换信号出现异常时,网络控制系统应在显示器IDU明显位置进行提示,便于驾驶员第一时间判断故障原因,缩短因在线故障处理导致的延误时间。
(4)列车运营5年后,在列车架修过程中,应重点对控制板DI / DO内部继电器进行预防性维修,以提高列车运行的稳定性。
参考文献
[1]李刚,李芾,黄运华. 100% 低地板轻轨车辆的发展与运用[J].机车电传动,2013(4).
[2]梅 樱,刘志刚,王磊,等. CANopen作为轨道交通车辆总线的可行性研究[J].铁道学报,2011,33(2).
[3]李芾,付茂海,黄运华,等.城市轻轨车辆及其相关技术的发展[J].电力机车与城轨车辆,2004(1).
[4]李润林.轻轨车液压与磁轨制动系统[D].北京:北京交通大学,2007.
[5] 塔子献,刘通,尹砚峰,等. 地铁列车保持制动施加反馈信号检测方法比较分析[J]. 现代城市轨道交通,2015(2).
[6]LIU J,GUAN X,TAN P. The Analysis and Test of Real-time Performance for Time-triggered CAN Bus in Automation and Logistics[C]. ICAL 2008. IEEE International Conference,2008.
[7]王冬雷.地铁车辆电空混合制动平滑过渡问题分析及改进建议[J].电力机车与城轨车辆,2010(3).
[8]李红军.长春轻轨车辆的液压制动设计原理[J].城市轨道交通研究,2007(10).
[9]路象群.广州地铁 A5 型车电空混合制动关键参数对列车停车精度的影响分析[J].机电信息,2016(18).
[10] 杜群威,张远东,谢川川.停放制动原理分析及故障诊断[J]. 铁道机车车辆,2018,38(4).
[11] 殳企平.城市轨道交通车辆制动技术[M]. 北京:中国水利水电出版社,2009.
收稿日期 2019-12-26
责任编辑 朱开明
